Zbigniew Krajka,
Gdynia, dnia 18.01.2011
Szymon Lewandowski
TM III grupa B1
Nawigacja – Dewiacja
Sprawozdanie nr 2
Cel ćwiczenia:
Określenie kursu magnetycznego budowy statku oraz próba kompensacji
dewiacji półokrężnej typu B1 oraz C1.
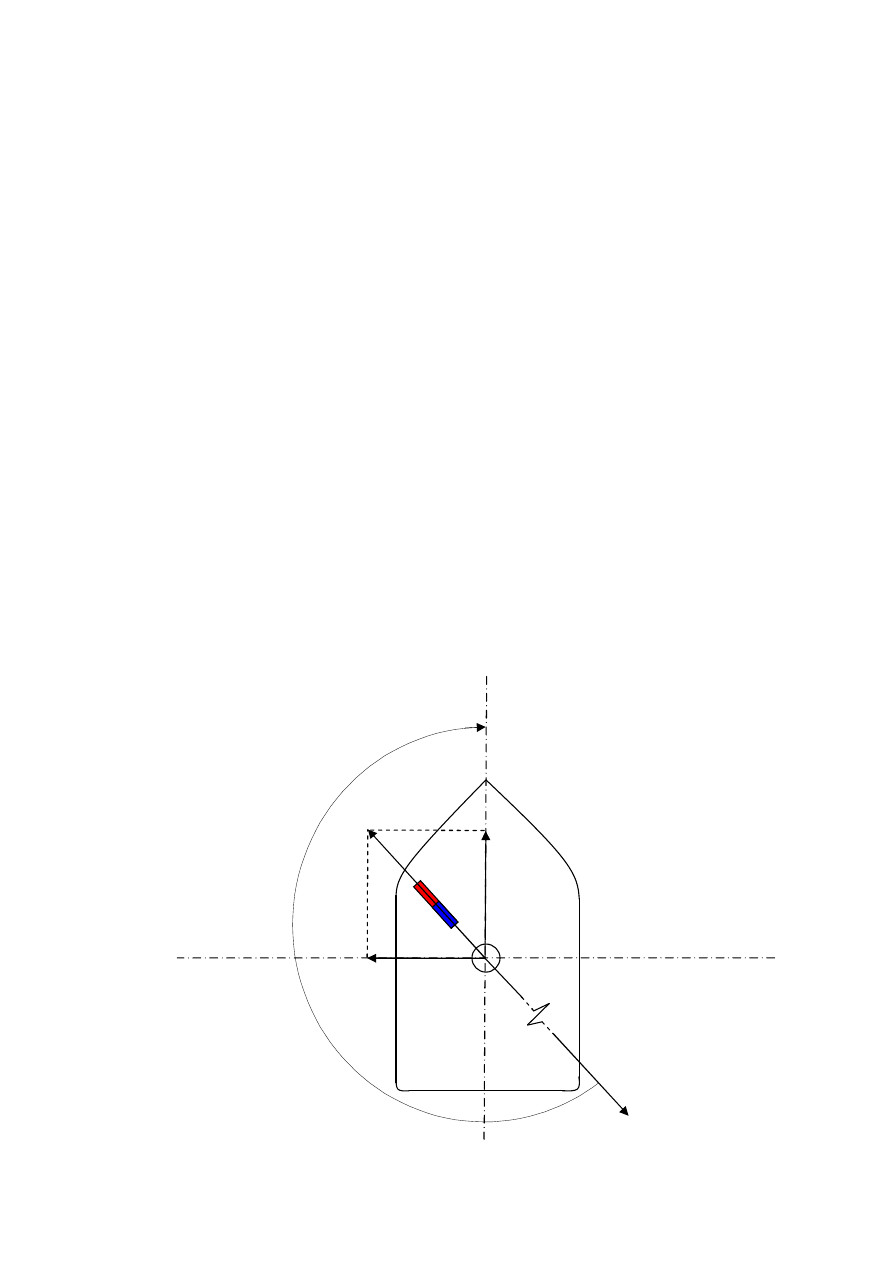
1. Określenie kursu magnetycznego budowy statku.
Kurs magnetyczny budowy statku jest to kurs na którym statek był budowany. Poprzez długie
przebywanie w jednym miejscu i prace związanie z budową (ciągłe wstrząsy, uderzenia i
wibracje), zaindukował się stały magnetyzm statkowy (w stali twardej). Rozkładając składową
poziomą M1 na statku nie przechylonym (składowa pionowa R1 nie ma wpływu na dewiację gdy
statek nie ma przechyłu), na składową P1 (wzdłużną do osi statku) oraz Q1 (prostopadle do osi
statku) można obliczyć kąt budowy statku korzystając ze wzoru:
α=arctg[ I Q1 I / I P1 I ]
podany kąt jest w systemie ćwiartkowym, o ćwiartce decyduje znak P i Q
a.) Sporządzono tabelę dewiacji zmieniając kurs w prawo o 45 stopni.
KM
KK
δ
000
005
-5
045
039
+6
090
074
+16
135
114
+21
180
169
+11
225
235
-10
270
290
-20
315
330
-15
Dane:
-P1
+Q1
+P1
+Q1
+P1
-Q1
-P1
-Q1
NE
SW
NW
SE
H=17,6 mikroT
B1=( δE - δW )/2=(16+20)/2=18
C1=( δN - δS )/2=(-5-11)/2=-8
k1=0,95
b.) Wartość siły ustawiającej igłę kompasową w kierunku północy magnetycznej na statku, można
obliczyć za pomocą wzoru:
Hm=k1*H=0,95*17,6
Hm=16,72
c.) Mając powyższe dane można obliczyć współczynniki P1 oraz Q1 stałego magnetyzmu
okrętowego korzystając ze wzorów:
P1=(B1* Hm)/57,3
Q1=(C1* Hm)/57,3
P1=5,252356
Q1=-2,33438
d.) Kąt budowy statku (α) wynosi:
α=arctg[ I -2,33438I / I 5,252356I ] = 23,96
o
(ćwiartka SW) więc
α =23,96+180=203,96
o
≈204
o
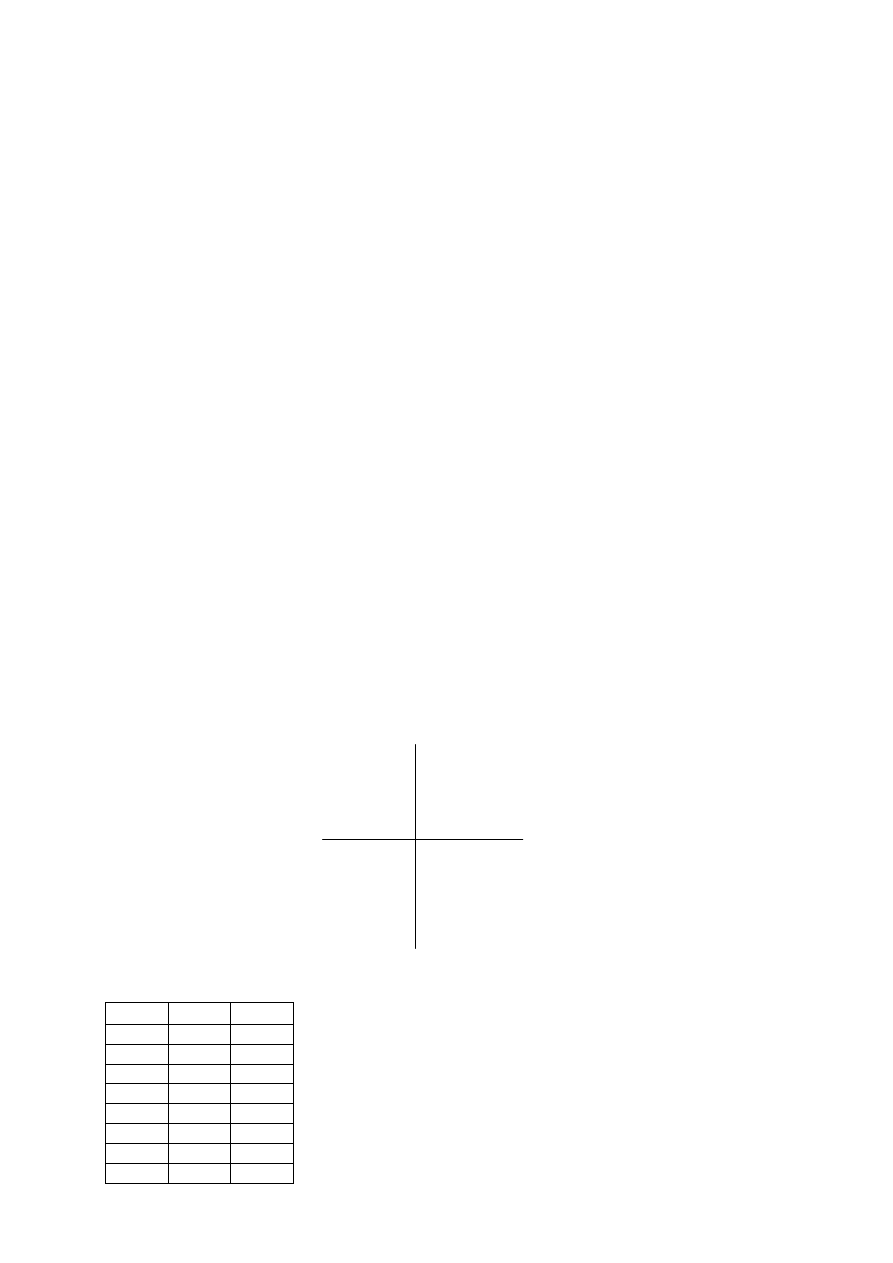
P1
Q1
H
M
M1
1
α
2. Obliczanie wartości składowej poziomej stałego magnetyzmu okrętowego M1.
M1=(P1
2
+ Q1
2
)
1/2
M1=
5,747745
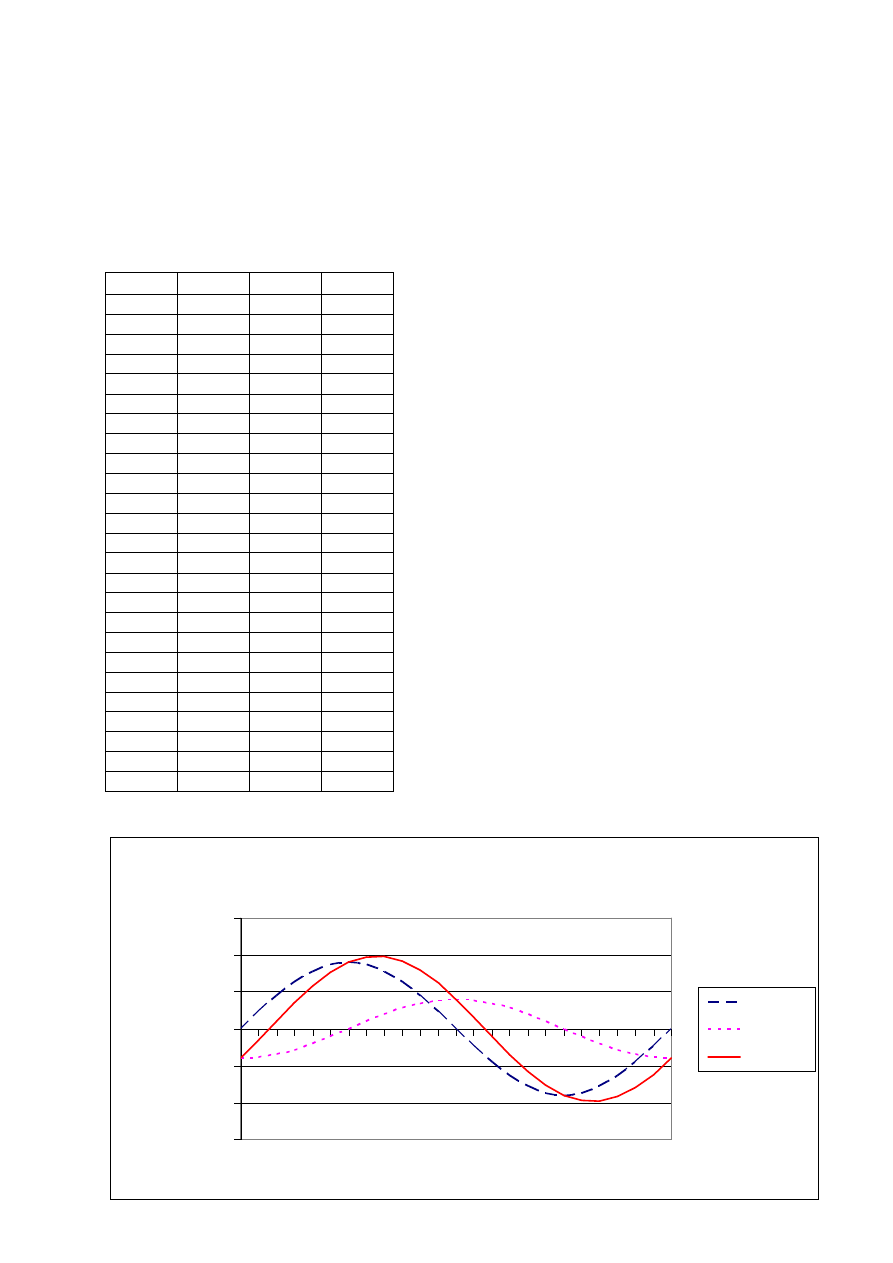
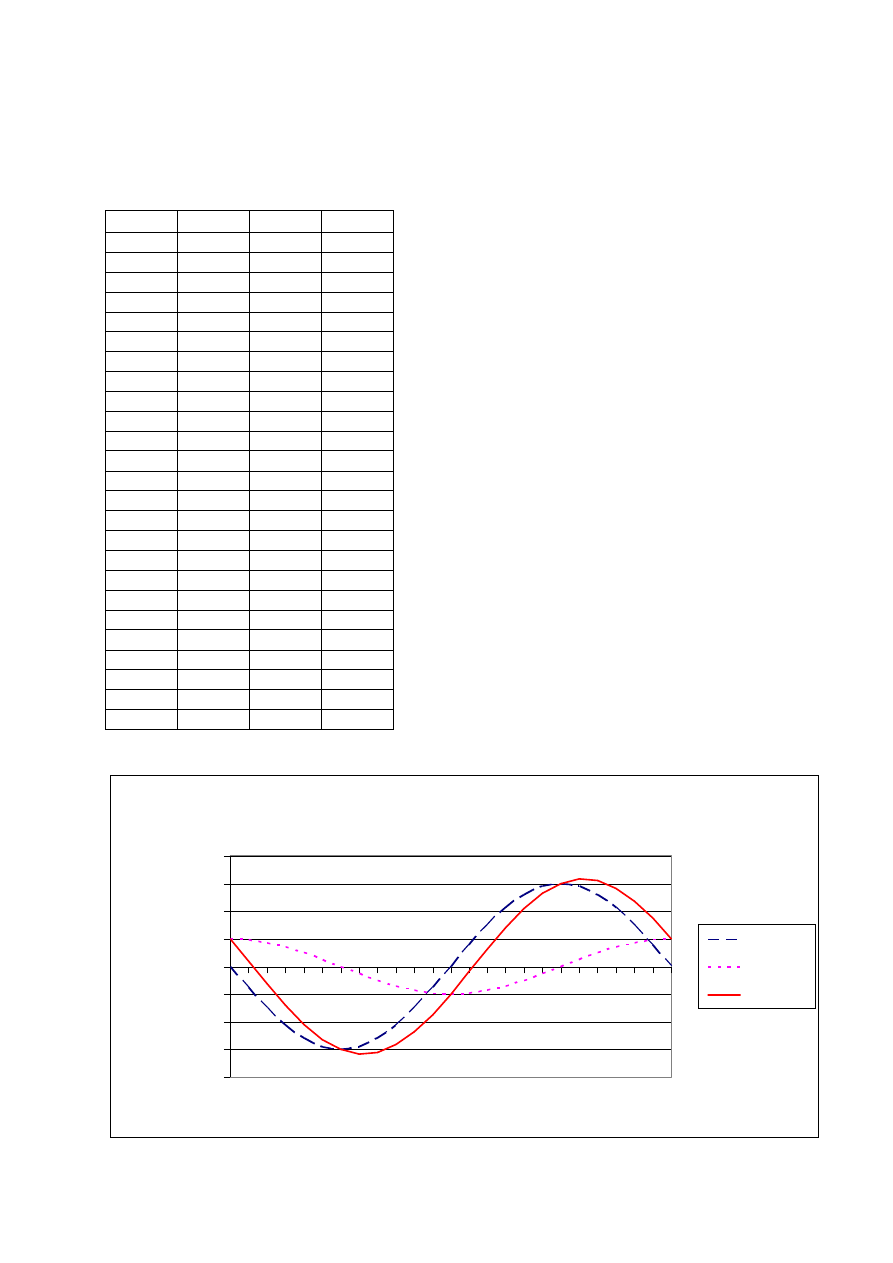
Tabela oraz wykres dewiacji B1, C1 oraz ich sumy.
KK
d
ps
B1
d
ps
C1
d
ps
0
0,0
-8,0
-8,0
15
4,7
-7,7
-3,1
30
9,0
-6,9
2,1
45
12,7
-5,7
7,1
60
15,6
-4,0
11,6
75
17,4
-2,1
15,3
90
18,0
0,0
18,0
105
17,4
2,1
19,5
120
15,6
4,0
19,6
135
12,7
5,7
18,4
150
9,0
6,9
15,9
165
4,7
7,7
12,4
180
0,0
8,0
8,0
195
-4,7
7,7
3,1
210
-9,0
6,9
-2,1
225
-12,7
5,7
-7,1
240
-15,6
4,0
-11,6
255
-17,4
2,1
-15,3
270
-18,0
0,0
-18,0
285
-17,4
-2,1
-19,5
300
-15,6
-4,0
-19,6
315
-12,7
-5,7
-18,4
330
-9,0
-6,9
-15,9
345
-4,7
-7,7
-12,4
360
0,0
-8,0
-8,0
Dewiacja Półokrężna : d ps(B1), dps(C1)
-30,0
-20,0
-10,0
0,0
10,0
20,0
30,0
0
45
90
135
180
225
270
315
360
Kurs Kompasowy [stopnie]
D
e
w
ia
c
ja
[
s
to
p
n
ie
]
B1
C1
DEW ps
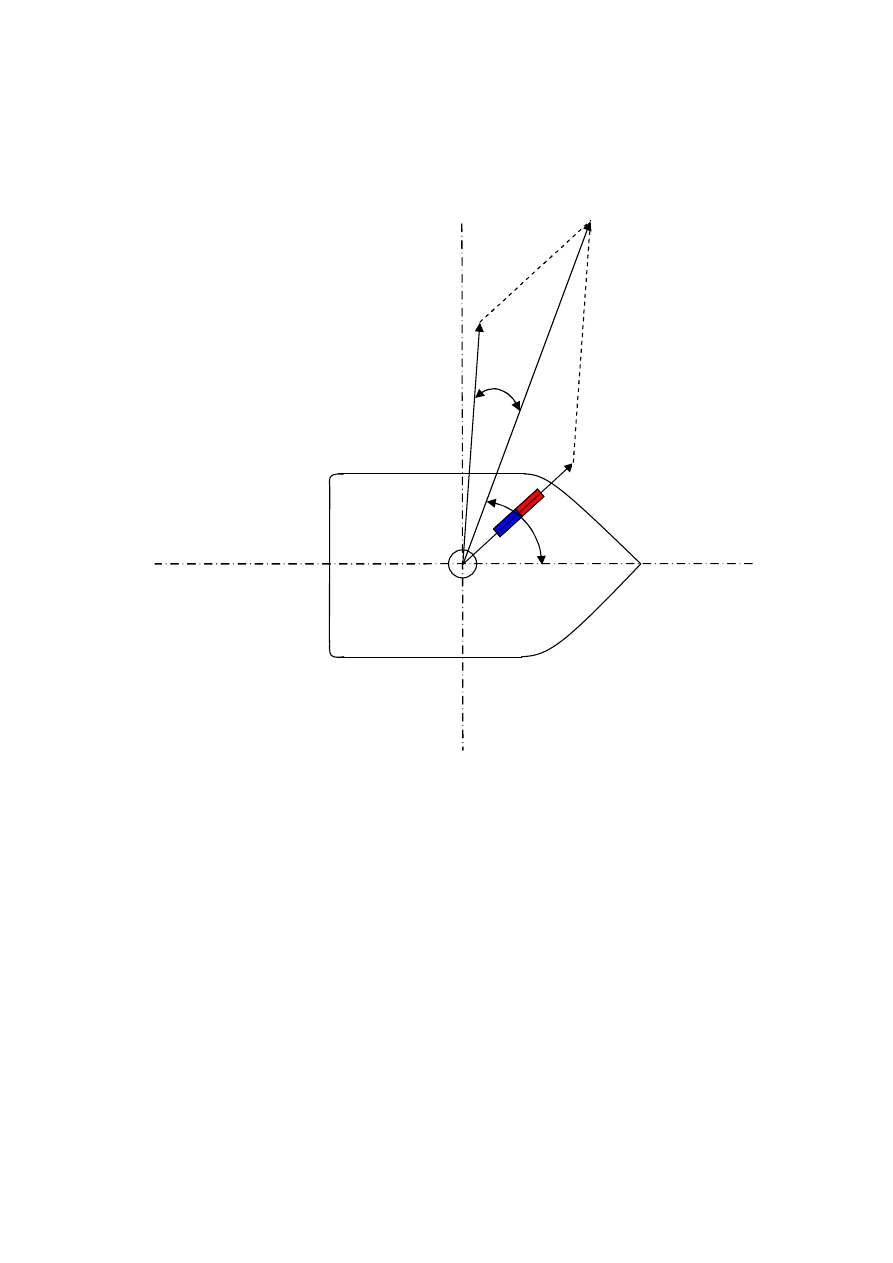
3. Obliczanie sił ustawiających Hk1, Hk2 oraz Hk
Siła Hk jest wypadkową składowej poziomej magnetyzmu ziemskiego Hm oraz składowej
poziomej magnetyzmu okrętowego M1 co prezentuje poniższy rysunek.
Hk1 - wartość średniej siły ustawiającej igłę kompasową (wypadkowa z Hm i P1)
Hk2 - wartość średniej siły ustawiającej igłę kompasową (wypadkowa z Hm i Q1)
Hk - wartość średniej siły ustawiającej igłę kompasową (wypadkowa z Hm i M1)
a.) Obliczanie wartości siły Hk1
Hk1=[P1*sin(KK + dps(B1))]/[sin(dps(B1))]
dla KK = 000
Hk1=Hm+P1=21,97236
dla KK = 180
Hk1=Hm-P1=11,46764
b.) Obliczanie wartości siły Hk2
Hk2=[Q1*cos(KK + dps(C1))]/[sin(dps(C1))]
dla KK = 090
Hk2 = Hm-Q1=14,38562
dla KK = 270
Hk2 = Hm+Q1=19,05438
c.) Obliczanie wartości siły Hk
Siłę Hk oblicza się tylko w dwóch przypadkach, kiedy:
- zwroty wektorów Hm i M1 są zgodne
- zwroty wektorów Hm i M1 są przeciwne
M1
1
Hm
1
Hk
1
δ
KK
Żadnego z tych przypadków nie uwzględnia tabela dlatego podane obliczenia mają wyłącznie
formę informacyjną.
Hk=[M1*sin(KK + dps + a)]/[sin(dps)]
+P , +Q
Hk=[M1*sin(KK + dps - a)]/[sin(dps)]
+P , -Q przypadek z zadania
Hk=[M1*sin(KK + dps - a)]/[sin(dps)]
-P , +Q
Hk=[M1*sin(KK + dps + a)]/[sin(dps)]
-P , -Q
dla δps = 0
Hk1 = Hm+P1=21,97236
dla δps = 0
Hk1 = Hm-P1=11,46764
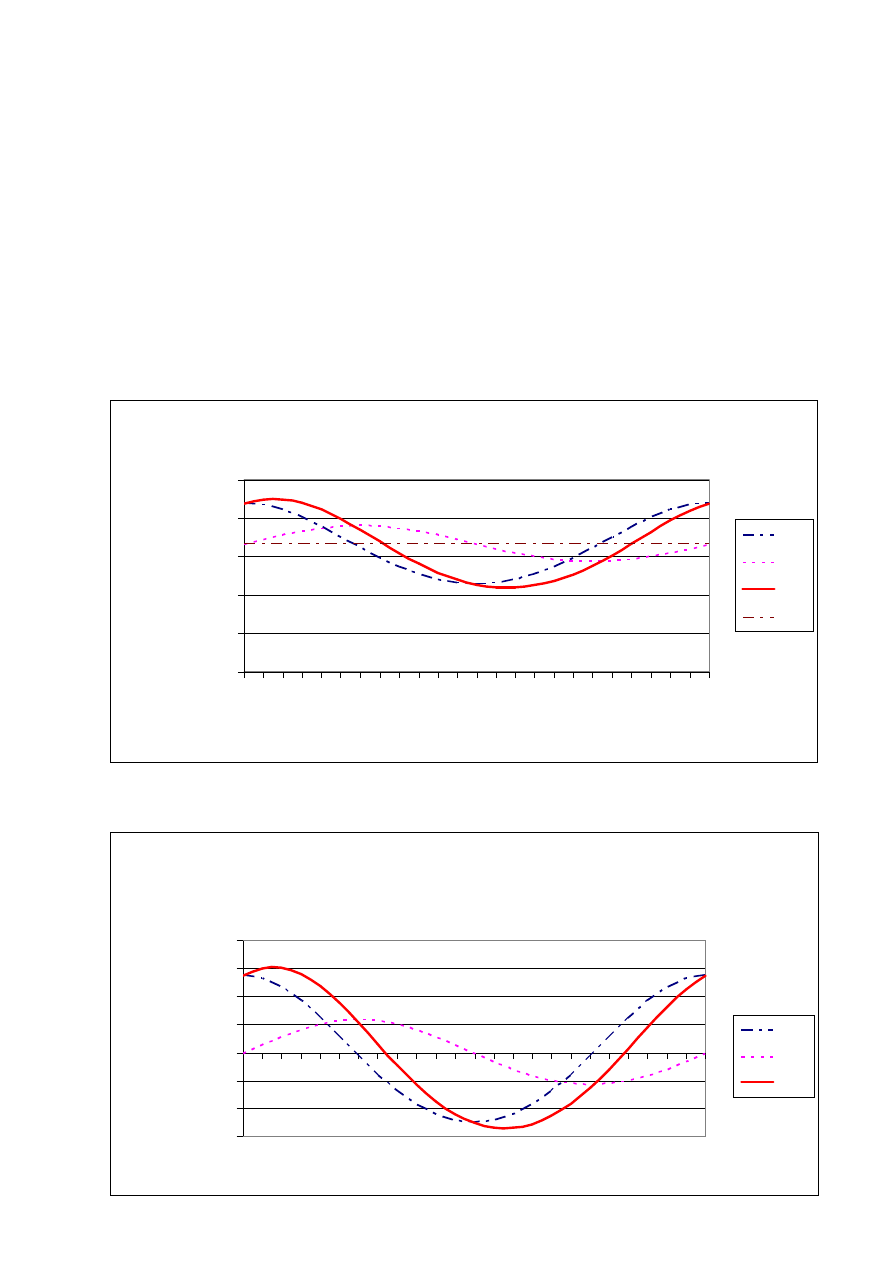
Wykres przedstawiający siły ustawiające igłę kompasu magnetycznego.
Siły Ustawiające Igłę Kompasu (Hk1,Hk2,Hk)
0,00
5,00
10,00
15,00
20,00
25,00
0
45
90
135
180
225
270
315
360
Kurs Kompasowy [stopnie]
S
ił
a
u
s
ta
w
ia
ją
c
a
[r
a
d
/m
ik
ro
T
]
Hk1
Hk2
Hk
Hm
Wykres zmiany sił ustawiających igłę kompasu w stosunku do wartości średnich (Hk1,Hk2,Hk)
Zmiany Sił Ustawiających Igłę Kompasu w
stosunku do wartości średnich (Hk1,Hk2,Hk)
-6,00
-4,00
-2,00
0,00
2,00
4,00
6,00
8,00
0
45
90
135
180
225
270
315
360
Kurs kompasowy [stopnie]
S
ił
a
u
s
ta
w
ia
ją
c
a
[r
a
d
/m
ik
ro
T
]
Hk1
Hk2
Hk
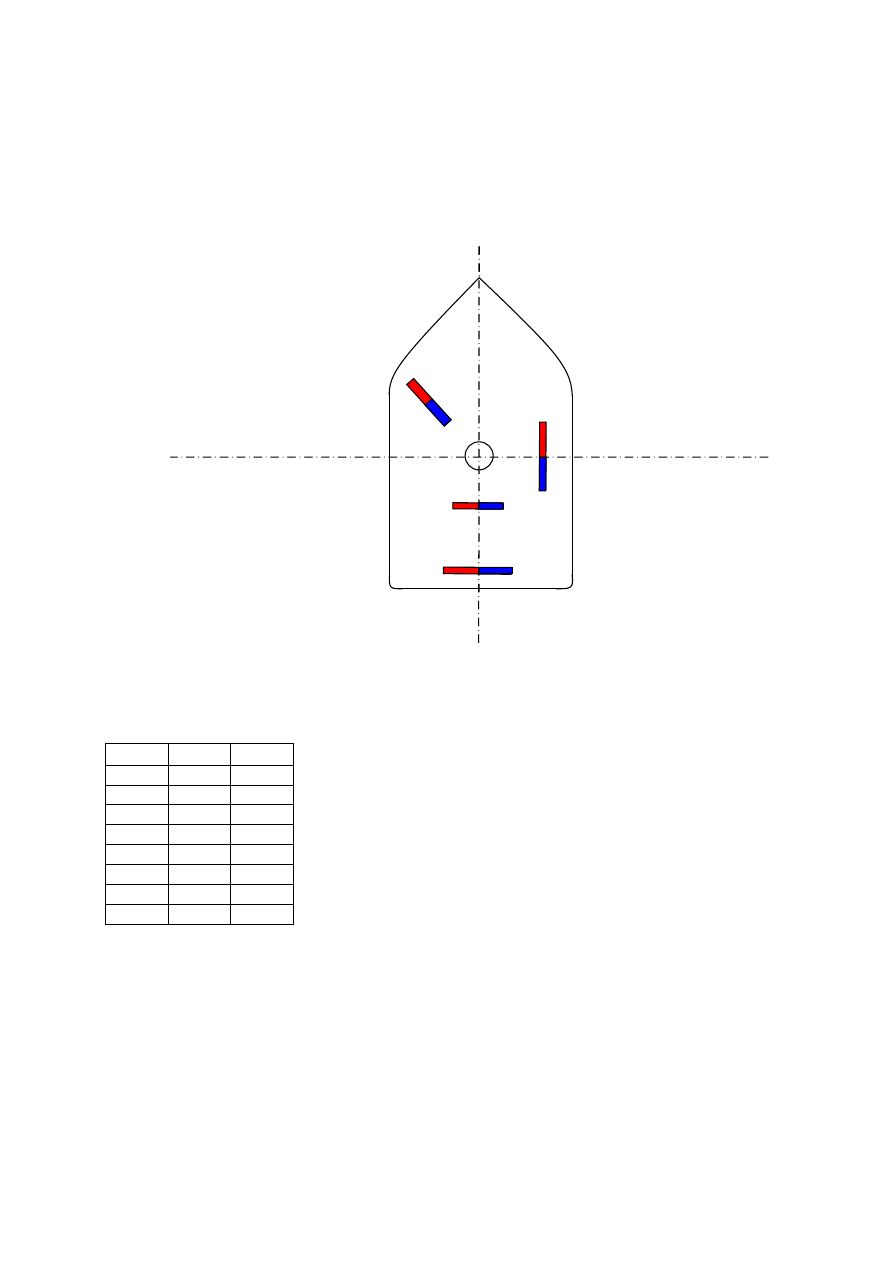
4. Kompensacja dewiacji B1 oraz C1
a.) aby zredukować działanie dewiacji typu B1 oraz C1, użyto jedną wzdłużną sztabę stali twardej
(średniej wielkości) typu B1 oraz dwa poprzeczne kompensatory typu C1 (średniej i małej
wielkości). Rozmieszczenie sztab prezentuje rysunek.
b.) po kompensacji ponownie zrobiono tabelę dewiacji zmieniając kurs w prawo o 45 stopni.
KM
KK
δ
000
000
0
045
044
+1
090
090
0
135
137
-2
180
181
-1
225
223
+2
270
267
+3
315
313
+2
c.) obliczanie przeprowadzono analogicznie jak dla danych przed kompensacją. Sporządzono
następującą tabelę oraz wykres dewiacji.
KK
d
ps
B1
d
ps
C1
d
ps
0
0,0
0,5
0,5
15
-0,4
0,5
0,1
30
-0,8
0,4
-0,3
45
-1,1
0,4
-0,7
60
-1,3
0,3
-1,0
75
-1,4
0,1
-1,3
90
-1,5
0,0
-1,5
105
-1,4
-0,1
-1,6
120
-1,3
-0,3
-1,5
135
-1,1
-0,4
-1,4
150
-0,8
-0,4
-1,2
165
-0,4
-0,5
-0,9
180
0,0
-0,5
-0,5
195
0,4
-0,5
-0,1
210
0,8
-0,4
0,3
225
1,1
-0,4
0,7
240
1,3
-0,3
1,0
255
1,4
-0,1
1,3
270
1,5
0,0
1,5
285
1,4
0,1
1,6
300
1,3
0,3
1,5
315
1,1
0,4
1,4
330
0,8
0,4
1,2
345
0,4
0,5
0,9
360
0,0
0,5
0,5
Dewiacja Półokrężna : d ps(B1), dps(C1)
-2,0
-1,5
-1,0
-0,5
0,0
0,5
1,0
1,5
2,0
0
45
90
135
180
225
270
315
360
Kurs Kompasowy [stopnie]
D
e
w
ia
c
ja
[
s
to
p
n
ie
]
B1
C1
DEW ps
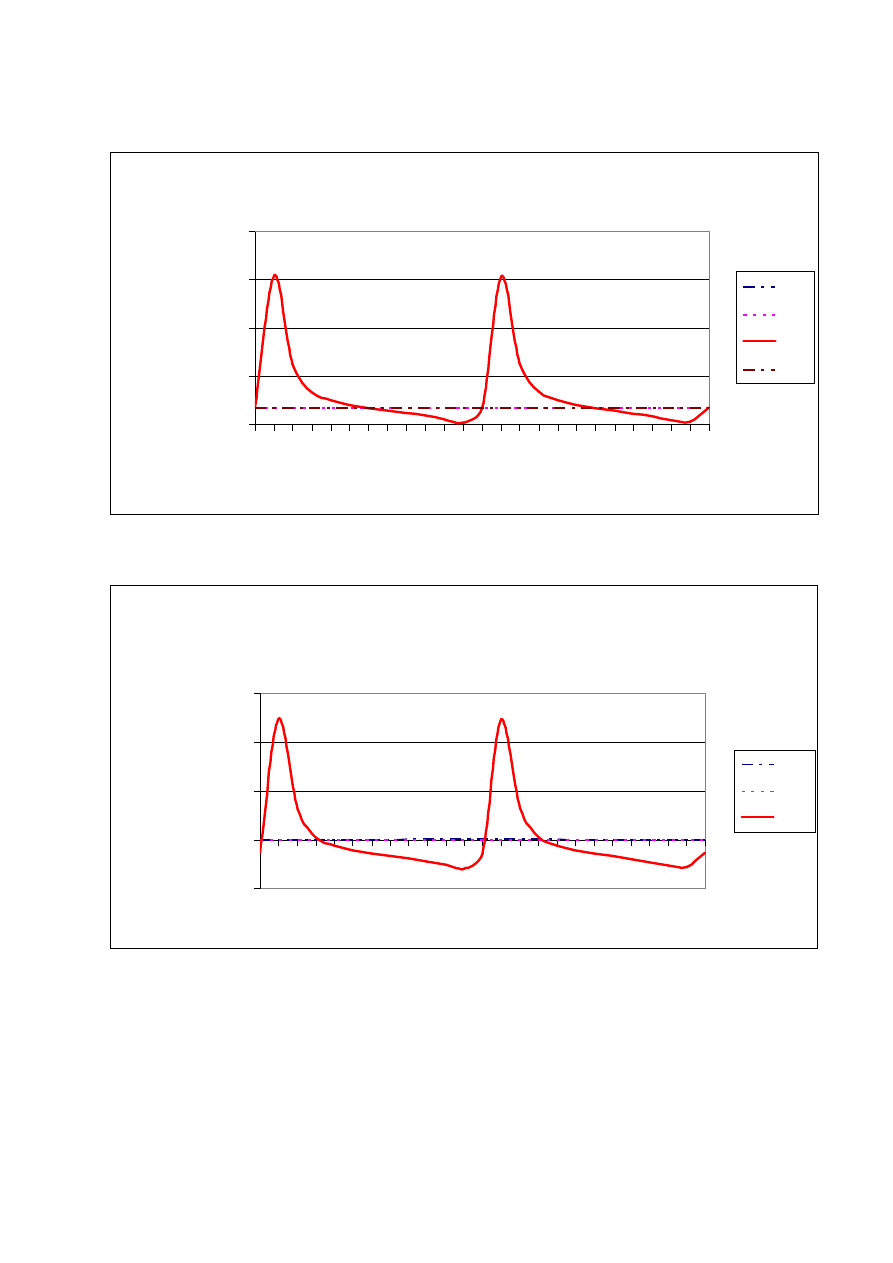
d.) wykres przedstawiający siły ustawiające igłę kompasu magnetycznego.
Siły Ustawiające Igłę Kompasu (Hk1,Hk2,Hk)
0,00
50,00
100,00
150,00
200,00
0
45
90
135
180
225
270
315
360
Kurs Kompasowy [stopnie]
S
ił
a
u
s
ta
w
ia
ją
c
a
Hk1
Hk2
Hk
Hm
Wykres zmiany sił ustawiających igłę kompasu w stosunku do wartości średnich (Hk1,Hk2,Hk)
Zmiany Sił Ustawiających Igłę Kompasu w
stosunku do wartości średnich (Hk1,Hk2,Hk)
-50,00
0,00
50,00
100,00
150,00
0
45
90
135
180
225
270
315
360
Kurs Kompasowy [stopnie]
S
ił
a
u
s
ta
w
ia
ją
c
a
Hk1
Hk2
Hk
Wnioski
Ćwiczenie na dewiaskopie polegało na próbie kompensacji dewiacji półokrężnej typu B1 oraz C1
wywołanych odpowiednio przez siły P1 oraz Q1. Siły pojawiły się wraz z wprowadzeniem do
dewiaskopu jednej sztaby imitującej stal twardą na statku.
Kompensacja dewiacji typu B1 oraz C1 odbywa się poprzez układanie sztab wzdłużnych oraz
poprzecznych na dewiaskopie. Poprzez próby i błędy udało się skorygować siły działające na
kompas i znacznie zmniejszyć dewiację. Maksymalne odchyłki od KK to -1,7 oraz +1,7 co czyni
otrzymane wyniki satysfakcjonującymi szczególnie biorąc pod uwagę brak doświadczenia w tego
typu zadaniach. Po wykonaniu ćwiczenia kompas ćwiczeniowy jest zdatny do użytku.
Wyszukiwarka
Podobne podstrony:
Sprawko dewiacja
Sprawko dewiacja 2003 doc
dewiacja sprawko 2 szymon&paula
Socjologia Dewiacji
prezentacja dewiacje seksualne
El sprawko 5 id 157337 Nieznany
LabMN1 sprawko
Obrobka cieplna laborka sprawko
Ściskanie sprawko 05 12 2014
1 Sprawko, Raport wytrzymałość 1b stal sila
stale, Elektrotechnika, dc pobierane, Podstawy Nauk o materialach, Przydatne, Sprawka
2LAB, 1 STUDIA - Informatyka Politechnika Koszalińska, Labki, Fizyka, sprawka od Mateusza, Fizyka -
10.6 poprawione, semestr 4, chemia fizyczna, sprawka laborki, 10.6
PIII - teoria, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektro
grunty sprawko, Studia, Sem 4, Semestr 4 RŁ, gleba, sprawka i inne
SPRAWKO STANY NIEUSTALONE, Elektrotechnika, Elektrotechnika
SPRAWOZDANIE Z farmako, Farmacja, II rok farmacji, I semstr, fizyczna, Fizyczna, Sprawozdania z fizy
mmgg, Studia PŁ, Ochrona Środowiska, Chemia, fizyczna, laborki, wszy, chemia fizyczna cz II sprawka
Zadanie koncowe, Studia PŁ, Ochrona Środowiska, Biochemia, laborki, sprawka
więcej podobnych podstron