4.3.1
Obliczyć odpowiedzi skokowe i impulsowe układów opisanych równaniami różniczkowymi: a) y′′ + 3y′ + 2y = x′ + 4x
b) y′ +2y = u′ + u
c) y′′′ + 3y′′ + 3y′ + y = 2x′ − 3x d)2y′ +12y′ +10y = 2x′ + 8x
e) 2y′ +12y′ +16y = 8x′ + 4x
f) 3y′ +15y′ +12y = 9x′ + 6x
Określić rodzaj członów automatyki występujących w powyższych przykładach 4.3.2
Obliczyć odpowiedzi skokowe i impulsowe układów danych transmitancjami: 1
a) G( s) =
s 2 + s
s 2 + s + 1
b) G( s) =
s 3 + s
1
c) G( s) =
2
s + 4 s + 20
s + 1
d) G( s) =
2
s ( s + 2)
1
e) G( s) =
s
1
f)
−0,5 t
G( s) =
e
10 s + 1
4.3.3
Znaleźć transmitancję operatorową i odpowiedź skokową członu dynamicznego, którego charakterystyka impulsowa ma postać 50( − t e 5 - − t
e 10 ) 1(t) .
4.3.4
t
−
1
T
Odpowiedź pewnego układu na deltę Diraca jest równa e
. Obliczyć odpowiedź tego
T
układu na skok położenia
_________________________________________________
1 _
_______________________________________________
Powered by xtoff®
lalik.krzysztof@wp.pl

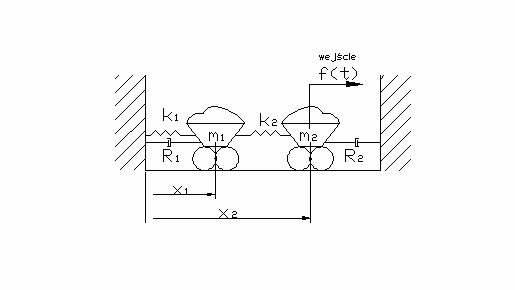

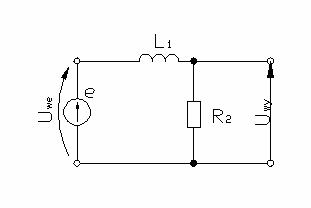
4.3.5
Obliczyć odpowiedzi skokowe i impulsowe układów z poniższych przykładów: a)
b)
c)
_________________________________________________
2 _
_______________________________________________
Powered by xtoff®
lalik.krzysztof@wp.pl
d)
_________________________________________________
3 _
_______________________________________________
Powered by xtoff®
lalik.krzysztof@wp.pl
Wyszukiwarka
Podobne podstrony:
Marecki, Zadanie do samodzielnego rozwiazania, Zadanie do samodzielnego rozwiązania
Zadania do samodzielnego rozwiązania 2
Zadania do samodzielnego rozwiązania ANOVA, nauka, EKONOMETRIA
5.3.1 Zadania do samodzielnego rozwiązania
Podział wyniku finansowego - zadanie do samodzielnego rozwiązania, Ekonomia, 3 semestr inne, rachunk
1.3.1 Zadania do samodzielnego rozwiązania
ZADANIA DO SAMODZIELNEGO ROZWIĄZANIA (1)
2.3.1 Zadania do samodzielnego rozwiązania
Ścinanie zadania do samodzielnego rozwiązania-2013
7.3.1 Zadania do samodzielnego rozwiązania
Klasa przekroju zadania do samodzielnego rozwiazania
Ścinanie zadania do samodzielnego rozwiązania 2013
Zginanie scinanie zwichrzenie zadania do samodzielnego rozwiazania
Porównawczy rachunek zysków i strat zadanie do samodzielnego rozwiązania dla studentów
46 Rama przestrzenna (do samodzielnego rozwiązania)
Przykladowe zadanie do samodzielnego wykonania
Rachunek kosztów zadanie do samodzielnego wykonania
więcej podobnych podstron