Podstawowe wielkości elektromagnetyczne Strumień elektromagnetyczny dS - elementarny wycinek powierzchni
B - wektor indukcji dφ=
B ° d S - strumień elementarny wektora indukcji B przez powierzchnię d S
φ=∫ B⋅ d S - strumień wektora indukcji B przenikający skończoną powierzchnie S to suma wszystkich S
strumieni elementarnych przenikających wszystkie powierzchnie elementarne Indukcja elektromagnetyczna Ψ - strumień skojarzony - strumień magnetyczny przenikający powierzchnię ograniczoną określonym obwodem elektrycznym
Ψ = z⋅ φ
Prawo indukcji magnetycznej (Faradaya) SEM indukowana w obwodzie jest równa co do wartości ze znakiem przeciwnym szybkości zmian w czasie strumienia skojarzonego z tym obwodem.
dΨ
e=− dt
dΨ
dφ
e=−
=−
=− B⋅ l⋅ V
dt
dt
Przepływ (SMM, amperozwoje) Suma algebraiczna prądów przenikających obszar objęty krzywą zamkniętą zwana jest przepływem przyporządkowanym tej krzywej.
J - gęstość prądu
di= J⋅ d S
Θ=∫ J⋅ d S= i⋅ z S
Przenikalność magnetyczna μ - przenikalność magnetyczna μ= μ ⋅ μ
0
r ( μ 0 - próżnia, μr - względna) H
μ =4⋅ π⋅10−7
=
0
[⋅ s ] μ
m
m
Fe=2, 31⋅10−3
∫ B⋅ d l= μ⋅ Θ
l
Natężenie pola magnetycznego
H - wektor natężenia pola magnetycznego
B
H = μ
∮ B⋅ d l=∮
H⋅ d l= Θ
μ
Prawo przepływu
Całka liniowa wektora natężenia pola magnetycznego wzdłuż krzywej zamkniętej równa jest przepływowi obejmowanemu przez tę krzywą.
∮
H⋅ d l= Θ
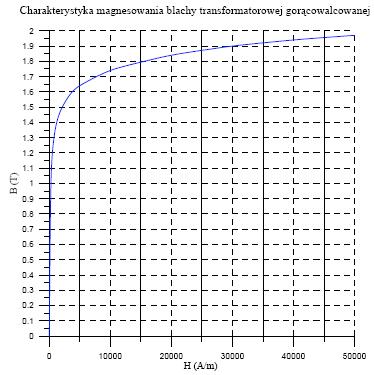
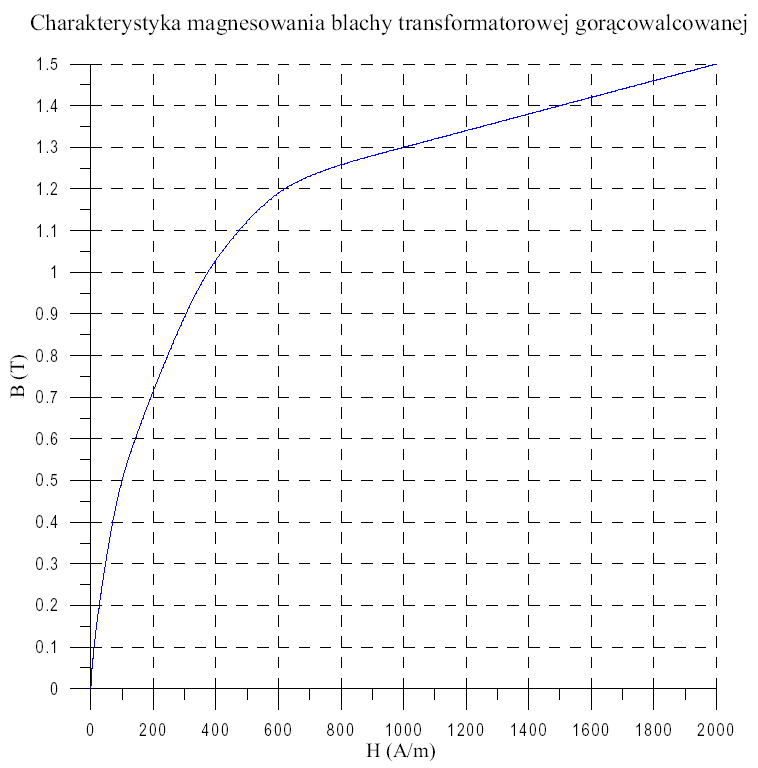
Charakterystyka magnesowania B [T]
0,26
0,5
0,7
0,86
1,04
1,14
1,2
1,25
1,36
1,44
1,49
1,56
1,61
H [ A/m]
50
100
150
200
300
400
500
620
1000
1500
2000
3000
4000
Podstawowe wielkości mechaniki klasycznej Druga zasada dynamiki Newtona Jeśli siły działające na ciało nie równoważą się (czyli siła wypadkowa
F
jest różna od zera), to ciało w
porusza się z przyspieszeniem wprost proporcjonalnym do siły wypadkowej, a odwrotnie proporcjonalnym do masy ciała.
F
m
a= w [ ]
m
s 2
m – masa [kg]
F
- siła wypadkowa [N]
w
Energia
- kinetyczna
dla ruchu posuwistego
m⋅ V 2
kg⋅ m 2
E
[ J = N⋅ m=
]
k =
2
s 2
V – prędkość liniowa dla ruchu obrotowego
J⋅2
Ek= 2
J – moment bezwładności [ kg⋅ m]
rad
ω - prędkość kątowa [
]
s
- potencjalna
grawitacji
E = m⋅ g⋅ h p
sprężystości
k⋅ x 2
E p= 2
k – współczynnik sprężystości [N/m], x – odkształcenie, odległość od położenia równowagi [m].
siła sprężystości
F =− k⋅ x
s
[N]
Pęd
kg⋅ m
p= m⋅
V
= N⋅ s
s
Tarcie
T =⋅ N
µ – współczynnik tarcia zależny od rodzaju powierzchni stykających się ciał, N – siła nacisku prostopadła do powierzchni styku ciał.
Zamiana prędkości obrotowej na kątową 2⋅⋅ n
= 60
n – prędkość obrotowa [obr/min]
ω - prędkość kątowa [rad/s]
Document Outline
Wyszukiwarka
Podobne podstrony:
Podstawowe wielkosci elektromagnetyczne i mechaniczne
Cyfrowy pomiar podstawowych wielkości elektrycznych
Sprawozdania przerobione, Pomiary podstawowych wielkości elektrycznych, ZESPÓŁ SZKÓŁ Im
Sprawozdania przerobione, Pomiary podstawowych wielkości elektrycznych, ZESPÓŁ SZKÓŁ Im
Podstawowe Wielkosci Elektromag Inne id 366475
ZASTOSOWANIE MULTIMETRÓW CYFROWYCH DO POMIARU PODSTAWOWYCH WIELKOŚCI ELEKTRYCZNYCH
24 cyfrowy pomiar podstawowych wielkosci elektrycznych
sciagi, ElektrWyklad1, Podstawowo wielkości w elektrotechnice:
Pomiary podstawowych wielkości elektrycznych 1, ozdysk, odzysk, utp, laboratorium teoria obwodow
Cw 2 - Wykonywanie pomiarow podstawowych wielkosci elektrycznych, Materiały WAT, Elektronika, Pem, L
Pomiary podstawowych wielkości elektrycznych, Miernik
cw 1 Pomiar parametrow oscyloskopu oraz podstawowych wielkości elektrycznych
Podstawowe wielkosci elektromagnetyczne i mechaniczne
24 cyfrowy pomiar podstawowych wielkosci elektrycznych
Cyfrowy pomiar podstawowych wielkości elektrycznych
Cw 7 Pomiary Podstawowych wielkości w polu elektromagnetycznym
więcej podobnych podstron