Zakład Elektrotechniki i Elektroniki Okrętowej
Wyższa Szkoła Morska
Laboratorium Podstaw Elektroniki (s. 051)
Strona
w Szczecinie
SOFTSTART
1 /6
1. Rozruchowy układ tyrystorowy prądu przemiennego
1.1. Wprowadzenie
Jeżeli rozruch silnika indukcyjnego jest przeprowadzany przez bezpośrednie przyłączenie do napięcia sieci, to prąd rozruchu jest ograniczony tylko impedancją w stanie spoczynku i może osiągać bardzo duże wartości, większe niż sześciokrotna wartość prądu znamionowego. W miarę wzrostu prędkości obrotowej prąd maleje, ale niemal przez cały czas trwania rozruchu jest większy od prądu znamionowego, co może powodować zakłócenia w sieci zasilającej i w innych przyłączonych do niej odbiorników.
Stosowane często urządzenia rozruchowe takie, jak przełączniki gwiazda-trójkąt lub autotransformatory z zaczepami nie w pełni zadowalają, gdyż przy przełączeniach występuje bardzo duży chwilowy wzrost prądu i momentu, powodując narażenia mechaniczne przekładni zębatych i pasowych, wałów oraz innych elementów napędu. Poza tym urządzenia rozruchowe, w których występują urządzenia ze stykami nie mogą być dopuszczone do pracy w niektórych środowiskach, np. w instalacjach do produkcji gazów lub produktów ropy naftowej.
Najbardziej pożądany dla tzw. miękkiego rozruchu jest układ umożliwiający płynną regulację napięcia silnika. Energoelektroniczne urządzenia rozruchowe zawierają trójfazowy układ regulacji napięcia przemiennego (Rys. 1a). W obwód każdej fazy silnika są włączone dwa tyrystory lub w wersji uproszczonej do każdej fazy włączony jest tyrystor i dioda w układzie przeciwrównoległym (Rys. 1b).
a)
b)
L1 L2 L3
L1 L2 L3
T
T
1
1
T
D
2
1
T
T
3
2
M
M
T4
3~
D2
3~
~
~
T5
T3
T6
D3
G G
G
1
3
5
G G
G
G
G
G
1
2
3
2
4
6
Układ
Układ
sterowania
sterowania
Rys. 1. Tyrystorowy układ rozruchu silników klatkowych
a) 6T(sześć tyrystorów), b) 3T -3D(trzy tyrystory-trzy diody).
Przez zmianę kąta α wysterowania tyrystorów można w sposób ciągły regulować napięcie międzyprzewodowe silnika (rys. 3). Kształt napięcia i prądu wyjściowego zależy nie tylko od kąta wysterowania tyrystorów, ale również od charakteru obciążenia. Stosowane są następujące metody sterowania rozruchem dające w wyniku:
- liniowy wzrost napięcia od wartości minimalnej do wartości napięcia sieci zasilającej w stałym przedziale czasu. Wartość minimalna jest nastawiana w zakresie 0 ÷ 50% napięcia zasilającego. Czas wzrostu napięcia
Zakład Elektrotechniki i Elektroniki Okrętowej
Wyższa Szkoła Morska
Laboratorium Podstaw Elektroniki (s. 051)
Strona
w Szczecinie
SOFTSTART
2 /6
Obciążenie rezystancyjno-indukcyjne
Obciążenie rezystancyjne
U
Uo
U
Uo
Io
Io
α
α
Rys. 3. Przebiegi prądu i napięcia wyjściowego przy rezystancyjnym i indukcyjno-czynnym charakterze obciążenia.
α - kąt wysterowania tyrystora, U – napięcie zasilania, Uo – napięcie wyjściowe, Io – prąd wyjściowy.
powinien być zwiększany automatycznie, jeżeli prąd przekroczy nastawianą wartość. W przeciwnym razie w czasie rozruchu przy obciążonym silniku napięcie może osiągnąć wartość maksymalną przed zakończeniem rozruchu;
- liniowy wzrost prądu do przyjętej wartości granicznej w określonym przedziale
czasu, a następnie utrzymywanie stałej wartości prądu. Po zakończeniu rozruchu prąd maleje do wartości określonej obciążeniem silnika. Ten rodzaj sterowania rozruchem jest korzystny w tych urządzeniach, w których obciążenie silnika podczas rozruchu występuje dopiero po pewnym czasie od chwili jego uruchomienia, np. w napędach wciągarek;
- liniowy wzrost prędkości obrotowej uzyskiwany w układzie regulacji z prędkościowym sprzężeniem zwrotnym. Ta metoda sterowania rozruchem może być korzystna dla urządzeń o wykładniczej charakterystyce obciążenia takich, jak wentylatory i pompy odśrodkowe.
Wyższe harmoniczne napięcia, które pojawiają się podczas pracy tyrystorów wytwarzają momenty pasożytnicze silnika przy czym harmoniczna rzędu 3 nie wytwarza pola wirującego a największy moment pasożytniczej pochodzi od piątej harmonicznej. Jest on zwykle nie większy niż 1 % momentu krytycznego silnika. Oddziaływanie jego daje się zauważyć tylko przy małych obciążeniach silnika i małej prędkości obrotowej.
Silniki indukcyjne z regulacją napięciową prędkości obrotowej mają charakterystyki mechaniczne o małej sztywności co pociąga za sobą konieczność rozruchu przy zmniejszonym momencie obciążającym na wale silnika.
1.2. Opis stanowiska laboratoryjnego
Stanowisko laboratoryjne składa się układu przekształtnikowego „SOFTVAR 1,5”, który zasila silnik asynchroniczny klatkowy. Pomiar prądu i napięcia realizowany jest zarówno poprzez cyfrowe wskaźniki tablicowe jak i poprzez czujniki prądu i napięcia typu LEM. Czujniki połączone są z kartą pomiarową, która zainstalowana jest w komputerze PC. Akwizycja i obróbka danych realizowana jest w programie DasyLab 5.5.
Zakład Elektrotechniki i Elektroniki Okrętowej
Wyższa Szkoła Morska
Laboratorium Podstaw Elektroniki (s. 051)
Strona
w Szczecinie
SOFTSTART
3 /6
PEN
L1
L2
L3
L1
L2
L3
SOFTVAR 1,5
1K
2K
U
LEM
I
LEM
M
3~
1K
2K2
L
N
1K2
2K
SOFTSTART
0
ROZRUCH BEZPOŚREDNI
Rys. 4. Schemat elektryczny układu i sterowania łagodnego rozruchu silnika klatkowego


Zakład Elektrotechniki i Elektroniki Okrętowej
Wyższa Szkoła Morska
Laboratorium Podstaw Elektroniki (s. 051)
Strona
w Szczecinie
SOFTSTART
4 /6
2. Przebieg ćwiczenia
2.1. Przygotowanie systemu pomiarowego
- Włączyć zasilanie stołu laboratoryjnego,
- Włączyć komputer, po inicjacji systemu operacyjnego uruchomić aplikację DasyLab 5.5 (ikona na pulpicie)
- Z listwy bocznego menu wybrać element oznaczony jako A/D i umieścić w dowolnym pustym miejscu w oknie programu DasyLab,
- Podobnie umieścić 2 elementy oznaczone jako Recorder,
- Jeśli na symbolu karty pomiarowej jest aktywne jedno wyjście (oznaczone jako 0) wcisnąć prawy klawisz myszy na symbolu karty 818 – HG i z kontekstowego menu wybrać Properties. Powinno pojawić się okno Analog Input jak na rysunku poniżej
- Poprzez dwukrotne kliknięcie lewym klawiszem myszy uaktywnić kanały oznaczone jako 1 i 2
(kanał 0 powinien być już aktywny) i potwierdzić.
- Połączyć wyjścia 0 i 2 symbolu karty pomiarowej z wejściami Recorder00 i Recorder01. Gotowy układ powinien wyglądać tak jak na rysunku poniżej.

Zakład Elektrotechniki i Elektroniki Okrętowej
Wyższa Szkoła Morska
Laboratorium Podstaw Elektroniki (s. 051)
Strona
w Szczecinie
SOFTSTART
5 /6
- Przywrócić na ekran dwa zminimalizowane okienka (lewy, dolny róg ekranu) oznaczone jako Recorder00 i Recorder01 i ustawić obok siebie.
- W okienku oznaczonym jako Recorder00 będzie rejestrowany przebieg napięcia a w Recorder01
przebieg prądu pobieranego przez silnik w stanach dynamicznych.
2.2. Przygotowanie układu softstart-silnik
UWAGA! Przełącznik trójpołożeniowy (metalowy) oznaczony jako SOFTSTART powinien być
ustawiony w pozycji 0.
- Na pulpicie stołu ustawić przełącznik ZAŁ./WYŁ. sieci 3x380/220 V w pozycję 1,
- Przełącznik RODZAJ PRACY ustawić na pozycję 4 (softstart).
2.3. Uruchomienie i wykonanie pomiarów
2.3.1 Rozruch bezpośredni silnika.
- Rozpocząć pomiar poprzez wciśnięcie klawiszem myszy przycisku start pomiaru w programie DasyLab.
- Trójpołożeniowym przełącznikiem SOFTSTART ustawić pozycje „rozruch bezpośredni” (na dół).
Nastąpi natychmiastowy rozruch silnika,
- Po około 2 sek. zatrzymać pomiar przyciskiem stop pomiaru w programie DasyLab,
- Wyłączyć silnik przełączając wyłącznik na pulpicie stołu w pozycję 0,
- Zapisać uzyskane przebiegi napięcia i prądu rozruchowego do pliku.
2.3.2 Rozruch poprzez układ softstart.
- Trójpołożeniowym przełącznikiem SOFTSTART ustawić pozycje „softstart” (do góry) a następnie.
- Rozpocząć pomiar poprzez wciśnięcie klawiszem myszy przycisku start pomiaru w programie DasyLab.
- Na obudowie SOFTVAR 1,5 przestawić przełącznik z pozycji 0 na 1. Nastąpi łagodny rozruch silnika,

Zakład Elektrotechniki i Elektroniki Okrętowej
Wyższa Szkoła Morska
Laboratorium Podstaw Elektroniki (s. 051)
Strona
w Szczecinie
SOFTSTART
6 /6
- Po około 2 sek. zatrzymać pomiar przyciskiem stop pomiaru w programie DasyLab,
- Wyłączyć silnik przełączając wyłącznik na obudowie SOFTVAR 1,5 w pozycję 0,
- Zapisać uzyskane przebiegi napięcia i prądu rozruchowego do pliku.
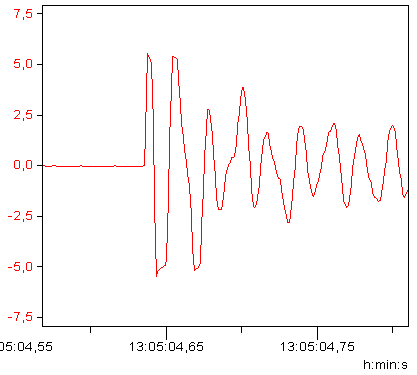
2.3.3 Przykładowe charakterystyki.
Poniżej przedstawiono przebiegi prądów pobieranych przez silnik przy rozruchu bezpośrednim i przy zastosowanym układzie softstart.
2.4. Sprawozdanie z wykonanego ćwiczenia
W sprawozdaniu umieścić schemat układu oraz charakterystyki prądów i napięć dla rozruchu bezpośredniego i dla łagodnego rozruchu przez softstart.
Wyszukiwarka
Podobne podstrony:
DS7 softstarty
SoftStart - 300W, zarowka SoftStart Układ z triakiem
DS7 softstarty
INNE Kompedium wiedzy jak dobrac Softstarter h1346g
Softstart fuer Schaltregler
Softstart fuer Taschenlampen
DTR HA dk8 10 1 2VAC 3LUF 5 T ST SoftStart
Softstart do żarówek samochodowych H7
więcej podobnych podstron