Wyższa Szkoła Morska
Instytut Elektrotechniki i Automatyki Okrętowej
Zakład Automatyki Okrętowej
PRACA KONTROLNA
Inteligentny pozycjoner SRD991 podstawowe cechy, działanie i obsługa
Opracował:
Paweł Jacewicz
Spis treści
1. Podstawowe dane techniczne pozycjonera SRD991...............................................................3
2. Wiadomości ogólne.................................................................................................................4
3. Działanie pozycjonera.............................................................................................................5
3.1. Analogowy tryb pracy........................................................................................................6
3.2. Cyfrowy tryb pracy............................................................................................................6
4. Rozruch urządzenia.................................................................................................................7
4.1. Wiadomości ogólne............................................................................................................7
4.2. Nastawa za pomocą klawiszy lokalnych............................................................................8
4.3. Tryby pracy dla klawiszy lokalnych..................................................................................9
4.4. Zatrzymanie urządzenia.....................................................................................................12
Literatura...................................................................................................................................12
1. Podstawowe dane techniczne pozycjonera SRD991
Rys.1. Widok pozycjonerów zainstalowanych na zaworach różnego typu
Cechy pozycjonera:
Autostart
Autodiagnostyka
Komunikacja HART lub FOXCOM
Konfiguracja za pośrednictwem klawiszy lokalnych, przenośnego terminala ręcznego, komputera PC lub systemu szeregowego I/A.
Niski pobór powietrza
Niskie wibracje we wszystkich kierunkach
Skok 8 do 100 mm (0,3 do 4 cali)
Zasięg kątowy do 95°
Łatwa obsługa przy użyciu trzech klawiszy
Ciśnienie powietrza zasilającego do 6 bar (90 psig)
Działanie pojedyncze lub podwójne
Mechaniczny wskaźnik ruchu (położenia)
Montaż na siłownikach liniowych bezpośrednio lub zgodnie z IEC 534
Montaż na siłownikach obrotowych zgodnych z VDI/VDE 3854
Klasa ochrony IP 65 oraz NEMA 4
Ochrona eksplozyjna: EEx ia IIC T4 oraz EEx ia IIC T6 zgodnie z CENELEC lub „faktyczne bezpieczeństwo” zgodnie z FM i CSA
Wbudowany niezależne graniczne przełączniki indukcyjne (opcjonalnie)
Czujniki ciśnienia powietrza zasilającego i ciśnienia wyjściowego (opcjonalnie)
Przekaźnik wspomagający do minimalizacji czasu skoku (opcjonalnie)
2. Wiadomości ogólne
Inteligentny elektro - pneumatyczny pozycjoner SRD 991 jest przeznaczony do obsługi siłowników zaworów pneumatycznych w systemach sterowania i regulatorach elektronicznych używających sygnału komunikacyjnego HART przekładanego na analogowy sygnał sterujący 4 ÷ 20 mA. Czysta praca cyfrowa jest dostępna przy użyciu komunikacji cyfrowej FOXCOM przez system szeregowy I/A.
Pętla sterowania została przedstawiona na rysunku 2. Inteligentny pozycjoner 1 i siłownik pneumatyczny 2 działają w obwodzie sterowania, gdzie wejściowa wartość zadana w jest wyprowadzana z regulatora nadrzędnego lub systemu operatorskiego, wyjściem natomiast jest sygnał ciśnienia y i pozycja x siłownika na zaworze 3. Pozycjoner może być podłączony zarówno do siłowników liniowych jak i obrotowych. Siłowniki wyposażone w sprężyny są sterowane przy pomocy pozycjonerów pojedynczego działania. Siłowniki bez sprężyn są sterowane przez pozycjonery podwójnego działania. Pozycjoner może być obsługiwany lokalnie za pomocą klawiszy lokalnych. Wersje pozycjonera HART i FOXCOM mogą być obsługiwane lokalnie lub zdalnie za pośrednictwem przenośnego terminala ręcznego 4 lub szeregowego systemu I/A (FOXCOM). Dla powietrza zasilającego zaleca się stosowanie regulatora filtrującego FOXBORO ECKARDT FRS923.
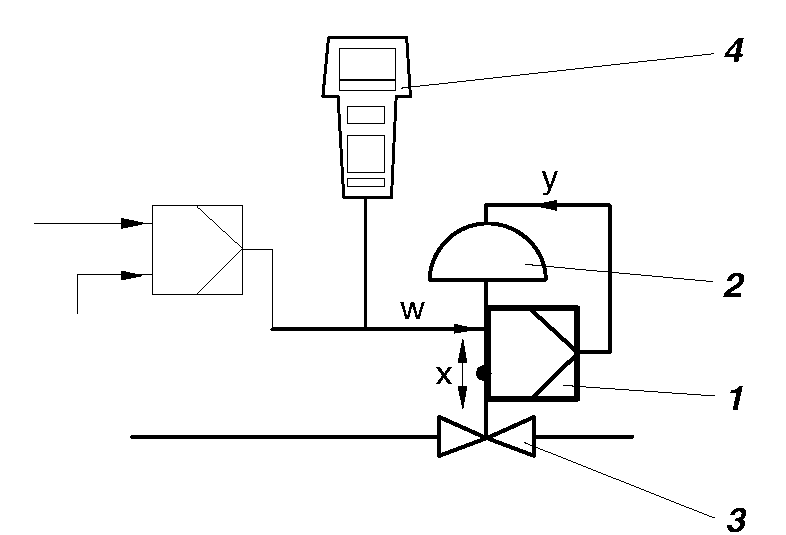
Rys.2. Schemat blokowy pętli sterowania z wykorzystaniem pozycjonera SRD991
3. Działanie pozycjonera
Schemat blokowy pozycjonera został przedstawiony na rysunku 3. Poniżej zostanie przedstawiona zasada obróbki i przetworzenia sygnału przez pozycjoner, w zależności od trybu w jakim pracuje (analogowy lub cyfrowy)
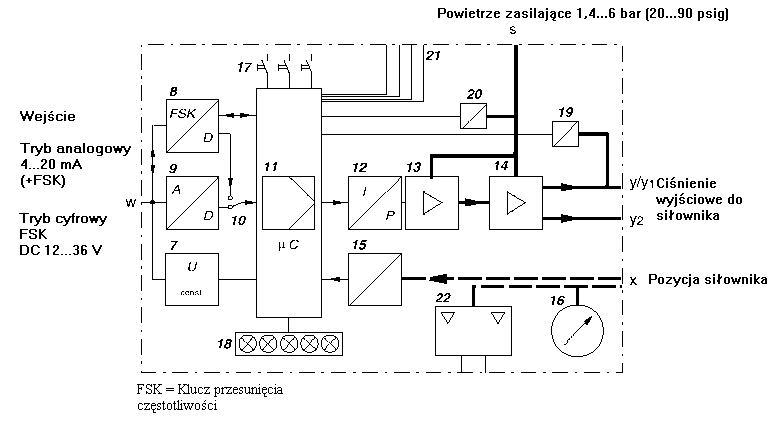
Rys.3. Schemat blokowy pozycjonera
3.1. Analogowy tryb pracy
Podczas działania w trybie analogowym (punkt do punktu), sygnał prądowy 4...20 mA na wejściu jest zamieniany na napięcie zasilające przez przetwornik napięcia 7. Wartość prądu jest mierzona, zamieniana przez przetwornik analogowo - cyfrowy (A/D) 9 i podawana poprzez przełącznik 10 do jednostki sterowania cyfrowego 11 zawierającej mikroprocesor. Sygnał wyjściowy dla operacji w trybie analogowym jest podawany do przetwornika elektromechanicznego (jednostka I/P) 12, który steruje analogowym wzmacniaczem pneumatycznym pojedynczego lub podwójnego działania 14, poprzez przedwzmacniacz 13. Wyjściem ze wzmacniacza 14 jest ciśnienie wyjściowe (y1, y2) podawane do siłownika. Wzmacniacze pneumatyczne są zasilane powietrzem zasilającym o ciśnieniu 1,4...6 bar (20...90 psig).
Położenie siłownika x jest przesyłane do jednostki sterującej 11 poprzez czujnik położenia (pojemnościowy) 15 i jest wyświetlane niezależnie na mechanicznym wskaźniku ruchu (położenia) 16.
Czujniki ciśnienia 19 i 20 (opcjonalne) i zewnętrzne wejścia / wyjścia 21 (opcjonalne) umożliwiają podłączenie niezależnych sygnałów alarmowych.
Inicjalizacja, rozruch oraz przetwarzanie danych dla pozycjonera mogą być przeprowadzone przy użyciu klawiszy lokalnych 17 przy wskazaniach stanu podawanych przez diody LED 18.
Wersje HART i FOXCOM przeprowadzają rozruch oraz przetwarzanie danych przy użyciu odpowiednio:
jednostka HART - przenośny terminal ręczny lub komputer PC,
jednostka FOXCOM - komputer PC lub system szeregowy I/A.
3.2. Cyfrowy tryb pracy
Podczas działania w trybie cyfrowym sygnał napięciowy prądu stałego jest dostarczany wejściem w. W napięciu modulowany jest sygnał FSK. Modulacja obejmuje informację (np.: wartość zadaną). Sygnał jest przesyłany cyfrowo do jednostki sterującej 11 przez jednostkę FSK oznaczony numerem 8.
Pozostałe tryby pracy nie różnią się od dostępnych przy analogowym sygnale wejściowym.
4. Rozruch urządzenia
4.1. Wiadomości ogólne
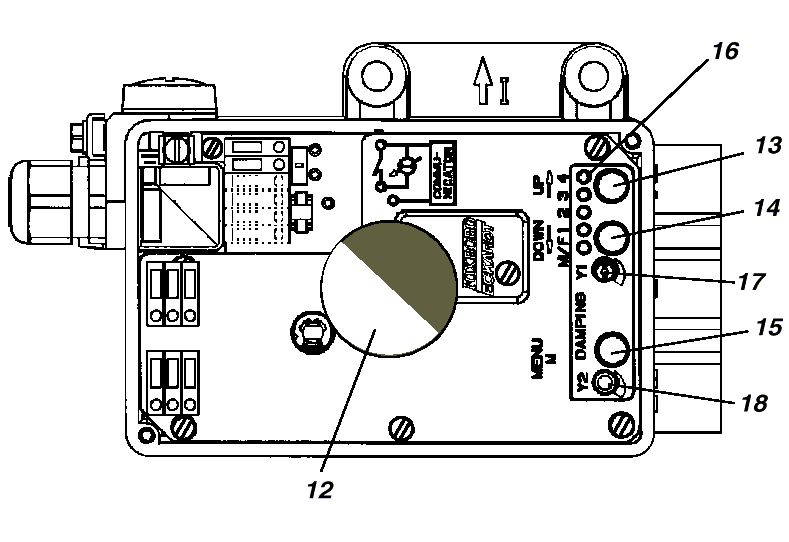
Rys.4. Podstawowe elementy regulacyjne pozycjonera SRD991
Elementy regulacyjne pokazano na rysunku 4. Przed uruchomieniem pozycjonera, muszą zostać podłączone sygnały wejściowy i powietrza zasilającego. Podłączenie powietrza zasilającego musi mieć wystarczającą przepustowość oraz podawać ciśnienie 1,4 ÷ 6 bar (20 ÷ 90 psig), które nie powinno jednak przekraczać maksymalnego ciśnienia pracy siłownika. Tłumienie dla wyjścia sygnału pneumatycznego (regulacyjna śruba dławiąca 17 dla siłowników pojedynczego działania lub 17 i 18 dla siłowników podwójnego działania) jest ustawione na wartość roboczą fabrycznie. Normalnie nie ma konieczności zmieniania go.
Ustawianie funkcji SRD991 jest realizowane za pośrednictwem klawiszy lokalnych kiedy pokrywa jest zdjęta. Wszystkie ważne funkcje mogą tam być wybrane. Wersje pozycjonera z komunikacją HART lub FOXCOM mają rozszerzony zakres funkcji. Funkcje nastawcze w trybie komunikacyjnym są realizowane za pośrednictwem przenośnego terminala ręcznego, komputera PC lub systemu szeregowego I/A (FOXCOM). W tym przypadku, klawisze lokalne na pozycjonerze mogą być zablokowane dla użytkownika.
Konfiguracja przy użyciu klawiszy lokalnych lub interfejsu komunikacyjnego może przeszkadzać działaniu aktualnego procesu! Podczas konfiguracji zaleca się odcięcie przepływu przez zawór.
Dla pierwszego uruchomienia zaleca się wybranie „Autostart” lub „Short autostart” (skrócone uruchomienie automatyczne). Dla inicjalizacji automatycznego uruchomienia używamy klawiszy lokalnych lub komunikacji HART lub FOXCOM. Wejściowy sygnał prądowy dla „Autostart” i „Short autostart” musi być większy niż 5 mA.
Po wybraniu przełożenia przekładni wskaźnika ruchu (położenia) 12 trzeba ustawić dysk wskaźnikowy na wale przekładni w żądaną pozycję i dopasować znak w oknie w pokrywie obudowy. Po położeniu pokrywy obudowy, trzeba zwrócić uwagę aby odpowietrzenie było ustawione ku dołowi.
4.2. Nastawa za pomocą klawiszy lokalnych
Ustawianie funkcji pozycjonera jest przeprowadzane przy użyciu klawiszy lokalnych 15 (M), 13 (UP), 14 (DOWN). Nie należy dotykać tyłu pozycjonera podczas operowania klawiszami (Niebezpieczeństwo skaleczenia się!). Poniższe stany wskazywane są przez diody LED 16:
Tabela 1. Stany wskazywane przez diody LED
Diody LED
|
Opis |
||||
Red |
Green |
|
|||
M |
1 |
2 |
3 |
4 |
|
- |
* |
- |
- |
- |
INIT: diody LED wskazują inicjalizację faz pozycjonera ↓ wymaga to kilku sekund |
- |
- |
* |
- |
- |
|
- |
- |
- |
* |
- |
|
- |
- |
- |
- |
* |
|
- |
- |
- |
- |
- |
NORMAL OPERATION normalna praca |
/* |
x |
x |
x |
x |
MENU: xxxx = menu |
- |
y |
y |
y |
y |
PARAMETER yyy dla menu |
* |
- |
- |
- |
- |
FAULT (błąd) |
Red - dioda czerwona, Green - dioda zielona
/* oraz x - światło błyskające, * oraz y - ciągłe
Podczas rozruchu pozycjoner powinien być w trybie pracy „NORMAL OPERATION”
4.3. Tryby pracy dla klawiszy lokalnych
Działanie klawiszy lokalnych jest możliwe tylko w trybach pracy: IN SERVICE, OUT SERVICE lub FAILSAFE.
INITIALIZE (Inicjalizacja):
Pozycjoner nie jest gotowy do pracy. Przeprowadzane są różne automatycznie przebiegające testy. W klika sekund jednostka automatycznie przełącza się w tryb normalnej pracy.
Normalna praca: IN SERVICE, OUT SERVICE lub FAILSAFE. Przełączanie trybów w Menu jest dostępne jeśli nie zablokowano przed wprowadzaniem zmian.
Poniżej przedstawiono krótki opis opcji menu, parametrów i działania klawiszy.
Tabela 2. Funkcje dostępne w menu i odpowiadające wskazania diod LED
Diody LED migające |
Menu |
Opis |
||||
Red |
Green |
|
|
|||
M. |
1 |
2 |
3 |
4 |
|
|
/* |
/* |
- |
- |
- |
1 |
Linearyzacja pozycji kątowej |
/* |
- |
/* |
- |
- |
2 |
Autostart |
/* |
- |
- |
/* |
- |
3 |
Działanie pozycjonera |
/* |
- |
- |
- |
/* |
4 |
Charakterystyka |
/* |
/* |
/* |
- |
- |
5 |
Ograniczenie ruchu / odcięcie |
/* |
/* |
- |
/* |
- |
6 |
zarezerwowane |
/* |
/* |
- |
- |
/* |
7 |
Test operacji pneumatycznych |
/* |
- |
/* |
/* |
- |
8 |
Test przebiegu sterownia |
/* |
- |
/* |
- |
/* |
9 |
Dostrojenie wejścia prądowego przetwornika A/D |
/* |
- |
- |
/* |
/* |
10 |
Skrócony autostart |
Red - dioda czerwona, Green - dioda zielona
Obsługa menu i wprowadzanie parametrów:
Wchodzimy do trybu Menu poprzez wciśnięcie klawisza M. Czerwona dioda LED świeci z zieloną LED1, co wskazuje opcje 1 w Menu.
Wybór żądanej opcji w Menu jest dokonywany poprzez wciśnięcie klawisza UP lub DOWN (opcja w górę lub w dół). Każde przyciśnięcie klawisza przesuwa o jedną opcję do przodu (lub wstecz). Błyskające zielone diody LED wskazują aktualnie wybraną opcję.
Równoczesne przyciśnięcie klawiszy UP i DOWN potwierdza wybraną opcję i wprowadza tryb wyboru parametru (Parameter). Czerwona dioda gaśnie, a pozostałe zielone wskazują parametr lub stan do ustawienia. Parametry ustawiamy zgodnie z tabelą 3.
W dowolnym czasie możemy opuścić tryb Menu, przyciskając klawisz M. Wszystkie diody zgasną i pozycjoner powróci do trybu Normal operation (normalna praca).
Poniżej w tabeli 3 przedstawiono dostępne parametry i odpowiednie dla nich stany diod przyporządkowane do odpowiednich funkcji Menu. Klawisze zmieniające wartości danego parametru oznaczono w nawiasach kwadratowych. Nazwy barw diod LED zostały użyte w wersji angielskiej: Red - dioda czerwona, Green - dioda zielona
[UP] + [DOWN] oznacza jednoczesne naciśnięcie klawiszy lokalnych UP i DOWN,
W momencie zapisu parametrów diody gasną na krótki czas
Tabela 3. Dostępne parametry i odpowiadające im wskazania diod LED
Wybrana wcześniej opcja menu |
Diody LED świecące ciągle |
Parametr lub stan |
Reakcja na przyciskane klawisze |
|||||
|
Red |
Green |
|
|
||||
|
M |
1 |
2 |
3 |
4 |
|
|
|
1 |
Linearyzacja pozycji kątowej |
- |
- |
* |
- |
- |
Siłownik liniowy |
[UP] - następny parametr, [DOWN] - poprzedni parametr [M] - powrót do Menu [UP] + [DOWN] - zapis ustawionego parametru i powrót do Menu |
|
|
- |
- |
- |
* |
- |
Siłownik obrotowy |
|
2 |
Autostart |
- |
* |
- |
- |
* |
Gotowość |
[UP] + [DOWN] - uruchamia funkcję IMMEDIATELY (natychmiastowo) : : praca automatyczna 1) : : Przy zakończeniu tryb automatycznie zmienia się na: praca normalna
|
|
|
- |
* |
- |
- |
- |
Start, geometria |
|
|
|
- |
- |
* |
- |
- |
Pochyłości |
|
|
|
- |
- |
- |
* |
- |
Kroki |
|
|
|
- |
- |
- |
- |
* |
Parametr sterujący |
|
|
|
- |
- |
- |
- |
- |
Koniec |
|
3 |
Działanie pozycjonera |
- |
* |
- |
- |
- |
Wprost |
[UP] - następny parametr, [DOWN] - poprzedni parametr [M] - powrót do Menu [UP] + [DOWN] - zapis ustawionego parametru i powrót do Menu |
|
|
- |
- |
- |
- |
* |
Odwrotne |
|
4 |
Charakterystyka
|
- |
* |
- |
- |
- |
Liniowa |
[UP] - następny parametr, [DOWN] - poprzedni parametr [M] - powrót do Menu [UP] + [DOWN] - zapis ustawionego parametru i powrót do Menu |
|
|
- |
- |
* |
|
- |
Stałoprocentowa |
|
|
|
- |
- |
- |
* |
- |
Odwrócona stałoprocentowa |
|
|
|
- |
- |
- |
- |
* |
Specjalna |
|
5 |
Ograniczenie ruchu / odcięcie
|
- |
* |
- |
- |
- |
Dolna wartość graniczna |
[UP] - następny parametr, [DOWN] - poprzedni parametr [M] - powrót do Menu [UP] + [DOWN] - zapis ustawionego parametru i powrót do Menu |
|
|
- |
- |
* |
- |
- |
Odcięcie |
|
|
|
- |
- |
- |
- |
* |
Górna wartość graniczna |
|
6 |
zarezerwowane |
- |
- |
- |
- |
- |
- |
- |
7 |
Test operacji pneumatycznych |
- |
*
|
|
|
* |
Prąd jednostki IP 0% ↓ 32 x nastawa ↓ klawisz UP 100% |
Każde wciśnięcie [UP] = plus ok. 3% 100% + [UP] = 0% Każde wciśnięcie [DOWN] = minus ok. 3% 0% + [DOWN] = 100% [M] - powrót do Menu [UP] + [DOWN] - bez funkcji
|
8 |
Test przebiegu sterownia |
- |
* |
- |
- |
- |
Pozycja 0 % |
Każde wciśnięcie [UP] = plus ok. 12,5% 100% + [UP] = 0% Każde wciśnięcie [DOWN] = minus ok. 12,5% 0% + [DOWN] = 100% [M] - powrót do Menu [UP] + [DOWN] - bez funkcji
|
|
|
- |
* |
* |
- |
- |
12,5 % |
|
|
|
- |
- |
* |
- |
- |
25 % |
|
|
|
- |
* |
* |
* |
- |
37,5 % |
|
|
|
- |
- |
* |
* |
- |
50 % |
|
|
|
- |
- |
* |
* |
* |
62,5 % |
|
|
|
- |
- |
- |
* |
- |
75 % |
|
|
|
- |
- |
- |
* |
* |
87, 5 % |
|
|
|
- |
- |
- |
- |
* |
100 % |
|
9 |
Dostrojenie wejścia prądowego przetwornika A/D |
- |
* |
- |
- |
- |
4 mA |
[UP] - następny parametr, [DOWN] - poprzedni parametr [M] - powrót do Menu [UP] + [DOWN] - zapis ustawionego parametru i powrót do Menu |
|
|
- |
- |
- |
- |
* |
20 mA |
|
10 |
Skrócony autostart |
- |
* |
- |
- |
* |
Gotowość |
[UP] + [DOWN] - uruchamia funkcję IMMEDIATELY (natychmiastowo) praca automatyczna 1) Przy zakończeniu tryb automatycznie zmienia się na: praca normalna |
|
|
- |
* |
- |
- |
- |
Start, geometria |
|
|
|
- |
- |
- |
- |
- |
Koniec |
|
Jeśli wyjdziemy poprzez RESET (klawisze M+DOWN+UP jednocześnie naciśnięte), parametr zostaje
ustalony na wartość zapisaną
4.4. Zatrzymanie urządzenia
Przed odłączeniem jednostki, rozłączyć powietrze zasilające i elektryczny sygnał wejściowy. Po rozłączeniu sygnału elektrycznego, ostatnie potwierdzenie konfiguracji pozycjonera jest przechowywana w pamięci.
Literatura
Positioners SRD991 Intelligent Positioner SRD991. 1998,1999, Intelligent Automation Worldwide FOXBORO ECKARDT GmbH.
Product Specifications SRD991 Intelligent Positioner. PSS EVE0105 A-(en), 05.98, Intelligent Automation Worldwide FOXBORO ECKARDT GmbH.
Master Instruction SRD991 Intelligent Positioner. MI EVE0105 A-(en), 10.97, Intelligent Automation Worldwide FOXBORO ECKARDT GmbH.
Communication with HART Hand-Held Terminal, Master Instruction SRD991 Intelligent Positioner. MI EVE0105 B-(en), 02.98, Intelligent Automation Worldwide FOXBORO ECKARDT GmbH.
Communication via HART User Interface ABO991, Master Instruction SRD991 Intelligent Positioner. MI EVE0105 C-(en), 03.97, Intelligent Automation Worldwide FOXBORO ECKARDT GmbH.
Parts List /Recommended Spare Parts List SRD991 Intelligent Positioner, SRD992 Digital Positioner. PL / RSPL EVE0105 A-(en), PL / RSPL EVE0106 A-(en), 09.98 Intelligent Automation Worldwide FOXBORO ECKARDT GmbH.
Technical Information SRD991 Intelligent Positioner. TI EVE0105 A-(en), 05.98, Intelligent Automation Worldwide FOXBORO ECKARDT GmbH.
1
2
Wyszukiwarka
Podobne podstrony:
Pozycjoner inteligentny SRD991pl
Inteligentny pozycjoner SRD991 Nieznany
INTELIGENCJA
Inteligencje wielorakie Howarda Gardnera w polskiej edukacji przedszkolnej
REPRODUKCJA POZYCJI SPOŁECZNEJ 7
2013 MYSLENIE inteligencja
Pozycja kobiety w różnych kulturach
Pozycje ułożeniowe w kinezyterapii
ABC Madrego Rodzica Inteligencja Twojego Dziecka
inteligencja emocjonalna id 218 Nieznany
Inteligentne oszczedzanie fragment
Instalacje inteligentne w budynkach
więcej podobnych podstron