AGH , Wydz. EAIiE Katedra Automatyki Napędu i Urządzeń Przemysłowych |
Imię , nazwisko : JAROSŁAW GANDZEL
|
||
TEORIA STEROWANIA I TECHNIKA REGULACJI
|
Semestr : letni .
|
||
Rok akademicki : 1998 / 99
|
Rok studiów : II
|
Grupa : II
|
|
Kierunek : ELEKTROTECHNIKA |
środa , godz . 1000 . |
||
Temat ćwiczenia : Komputer w układzie automatycznej regulacji. |
Nr ćwiczenia : 5 .
|
||
Data wykonania ćwiczenia : 28.04.1999.
|
Data zaliczenia sprawozdania : |
||
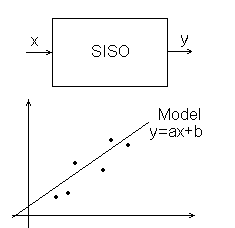
Mając do czynienia z nieznanym obiektem (czarną skrzynką) wykonujemy pomiary sygnałów wejściowych i wyjściowych a następnie możemy użyć programu komputerowego Matlab do analizy tego obiektu.
Analizę obiektu można podzielić na następujące etapy:
-identyfikację,
-modelowanie,
-regulację,
-napisanie programu na mikroprocesor.
Proces identyfikacji obiektu , którego wynikami liczbowymi dysponujemy i mamy opisujące go równania różniczkowe, polega na dobraniu odpowiednich współczynników tak aby odzwierciedlały wyniki liczbowe (przez porównanie odpowiedzi).
Jako model obiektu może nam posłużyć układ oparty o wzmacniacz operacyjny. Realizuje on funkcje różnych podstawowych członów układów automatycznej regulacji.
I tak w naszym przypadku posłuży on nam za element inercyjny:
Równania różniczkowe opisujące wzmacniacz możemy zastąpić równaniami transmitancyjnymi, oraz przedstawić cały wzmacniacz w postaci transmitancji zastępczej:
Przyjmując za
= k , a za RSCS=T dostajemy ostatecznie:
Czyli transmitancję członu inercyjnego.
Jeżeli połączymy dwa człony inercyjne jak na poniższym rysunku to otrzymamy układ drugiego rzędu reprezentujący szeroką gamę obiektów, procesów opisywanych równaniem różniczkowym drugiego rzędu.
Schemat rzeczywisty członu dwuinercyjnego:
Schemat blokowy w postaci transmitancyjnej:
Proces identyfikacji (dyskretny):
Proces identyfikacji obiektu , którego wynikami liczbowymi dysponujemy i mamy opisujące go równania różniczkowe, polega na dobraniu odpowiednich współczynników tak aby odzwierciedlały wyniki liczbowe (przez porównanie odpowiedzi).
Mamy nieznany układ:
Następnie dobieramy formułę matematyczną.
y(n)=f[y(n-1)........y(n-k1),u(n-1).........u(n-k2)]
y(n)=a1y(n-2)+a2y(n-1)+a3u(n-1)
1.Obiekt pierwszego rzędu:
Równanie różniczkowe dla obiektu inercyjnego pierwszego rzędu ma postać:
Natomiast równanie różnicowe:
Wykorzystując metodę najmniejszych kwadratów szukamy takich wartości współczynników „a” i „b” aby suma kwadratów różnic była jak najmniejsza. Jest to dla nas funkcja celu.
Korzystając z modelu jednoinercyjnego dokonujemy analogicznych przekształceń:
Wykorzystując metodę najmniejszych kwadratów szukamy takich wartości współczynników „a” i „b” aby suma kwadratów różnic była jak najmniejsza. Jest to dla nas funkcja celu.
A teraz rozpatrzmy metodę najmniejszych kwadratów dla układów wielowymiarowych:
y(n)= a1x1+ a2x2+ a3x3
Ogólna postać macierzowa równań dla układu wielowejściowego wygląda następująco:
Możemy także napisać funkcję błędu dla takiego układu:
Wykorzystując poniższe przekształcenia możemy doprowadzić do wyznaczenia wektora współczynników [a]:
(A+B)T=AT+BT
(AB)T=BTAT
ATB=BTA
(λA)T=λAT
Q=(Y +Xa)T ⋅(Y-Xa)=(YT-aTXT) ⋅ (Y-Xa)=YTY - YTXa - aTXTY + aTXTXa
Q=YTY - 2aTXTY + aTXTXa
XTXa = XTy / ⋅XTX
a=(XTX)-1 XT Y det(XTX)≠0
1
4
Wyszukiwarka
Podobne podstrony:
3 kanał ster świateł dysko
Świąteczna
światełka
CZY LICZBY RZĄDZĄ ŚWIATEM
wiersze świateczne, Boże Narodzenie
Świąteczny świat, Dokumenty - różności dla dzieci
Piernik Świąteczny, Przepisy kulinarne
Zaufali Jezusowi-na wizytacje biskupa, szkolne, uroczystości, SCENARIUSZE świateczne i inne
Świąteczny makowiec
MEDYTACJA TRZECH ŚWIATEŁ
POLSKIE TRADYCJE ŚWIĄTECZNE
ustawianie świateł
Kolorowe zyczenia swiateczne
Miłośc pod choinkę (Świąteczny romans) 3 Arnette Lamb Królewski posłaniec
17 Montaż świateł postojowych w drzwiach tylnych
80 Nw 12 Sygnalizator wlaczonych swiatel
Światła pozycyjne (lewe), włącznik świateł pozycyjnych
Przyciaganie bogactwa zycie w pelnej harmonii ze swiatem przybo
Piernik z migdałami, Ciasteczka świąteczne
Kartki świąteczne, Scenariusze zajęć
więcej podobnych podstron