REGULACJA DWUSTAWNA
Stosuje się kilka podziałów klasyfikacyjnych układów automatycznej regulacji (UAR). Do najczęściej stosowanych należą podział ze względu na zadanie układu oraz podział ze względu na sposób działania elementów układu.
Ze względu na sposób działania UAR można podzielić na: - układy o działaniu ciągłym,
- układy o działaniu przerywnym.
W układach o działaniu ciągłym wszystkie elementy układu działają w sposób ciągły w czasie i w poziomie. Oznacza to, że wszystkie sygnały są funkcjami ciągłymi i mogą przybierać każdą wartość (od najmniejszej do największej), znajdującą się w normalnym obszarze ich zmienności.
Układy o działaniu przerywnym (dyskretnym) zawierają przynajmniej jeden element o działaniu dyskretnym w czasie lub w poziomie. Sygnały wyjściowe (lub wejściowe) tych elementów mogą przyjmować tylko niektóre, wybrane wartości lub występują tylko w wybranych chwilach czasu.
Przykładem układów o działaniu przerywnym są układy regulacji dwustawnej.
Wielkość wyjściowa regulatora w dwustawnych UAR może przyjmować tylko dwie wartości: maksymalną i minimalną. Taki regulator nazwano regulatorem dwustawnym. Prostota i taniość regulatorów dwustawnych zadecydowały o ich powszechnym zastosowaniu, ograniczonym jednak do obiektów, w których dopuszczalne są periodyczne zmiany wielkości regulowanej, wynikające z dwustawnego działania regulatora.
Regulacja dwustawna jest najczęściej stosowana w układach regulacji temperatury.
1. Budowa dwustawnych regulatorów temperatury
Regulatory dwustawne można podzielić pod względem konstrukcji na dwie grupy.
Pierwsza grupa to regulatory z zestykami przełączanymi bezpośrednio przez czujnik (termometry stykowe). Drugą grupę stanowią regulatory dwustawne z pośrednim przełączaniem zestyku.
1.1 Regulatory dwustawne z zestykami przełączanymi bezpośrednio przez czujnik
Przykładem regulatora dwustawnego z zestykiem przełączanym bezpośrednio przez czujnik jest termometr rtęciowy kontaktowy (rys. l).
Do zbiornika rtęci 1 zatopiono na trwałe elektrodę 2. W rurce 3 znajduje się ruchoma elektroda 4 połączona z nakrętką 5. Pokręcając śrubą 6 za pomocą magnesu zewnętrznego 7, przesuwamy elektrodę 4, co zmienia wartość zadaną. Ze względu na małą obciążalność zestyku elektroda 4 - rtęć, termometr kontaktowy współpracuje zwykle z przekaźnikiem pośredniczącym. Zetknięcie słupka rtęci z elektrodą nastawną 4 powoduje zamknięcie obwodu zasilania przekaźnika. Wówczas jego zestyk rozwierny wyłączy uzwojenie grzejne, np. pieca elektrycznego. W innych konstrukcjach zestyki mogą być uruchamiane bimetalem, dylatometrem itp.
1.2. Regulatory dwustawne z pośrednim przełączaniem zestyku
W tej grupie regulatorów modna wyróżnić regulatory z miernikiem wychyłowym oraz regulatory elektroniczne.
Regulatory z miernikiem wychyłowym
Przykładowe rozwiązanie takiego regulatora pokazano na rys. 2. Do wskazówki miliwoltomierza 1 zamocowano blaszkę 2 z cienkiej folii aluminiowej. Na obrotowym ramieniu 3 umieszczono opór fotoelektryczny i żarówkę. Jeżeli temperatura obiektu przekroczy temperaturę zadaną, to blaszka przetnie strumień świetlny, padający na powierzchnię fotoopornika. Powoduje to wzrost oporności fotoopornika i zmianę stanu przekaźnika, który steruje obiektem. Podobną konstrukcję ma regulator z przestrajanym generatorem. Zamiast zespołu żarówka -fotoelement zastosowano w nim układ dwóch cewek. Cewki te stanowią część elektronicznego generatora, który jest rozstrajany przez wchodzącą między nie blaszkę. Jeśli wartość rzeczywista zrówna się z wartością zadaną, to blaszka, która jest zamocowana do wskazówki miliwoltomierza, wchodzi między cewki generatora i powoduje zerwanie drgań. Cofnięcie się wskazówki z blaszką powoduje ponowne wzbudzenie drgań. Powstawanie i zanikanie drgań w generatorze steruje, poprzez odpowiedni układ elektroniczny, pracą przekaźnika wyjściowego.
Regulatory elektroniczne
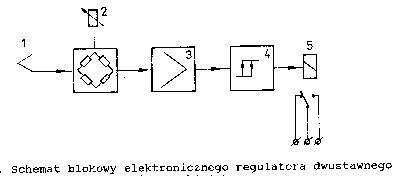
Na rysunku 3 przedstawiono uproszczony schemat układu elektrycznego, stosowanego w regulatorach elektronicznych. Czujnik temperatury 1 i potencjometr nastawczy 2 wartości zadanej są włączone w układ mostka. Różnica między wartością zadaną i wielkością regulowaną powoduje powstawanie sygnału błędu regulacji na wyjściu mostka. Sygnał ten jest podawany na wyjście wzmacniacza 3 i po wzmocnieniu steruje przez przerzutnik przekaźnikiem 5. Stan przekaźnika zależy od różnicy między wartością rzeczywistą temperatury, mierzoną przez czujnik, a jej wartością zadaną nastawioną na regulatorze.
2. Charakterystyka statyczna regulatora dwustawnego
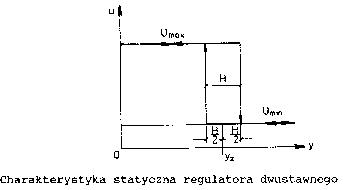
Charakterystykę statyczną regulatora dwustawnego z histerezą dodatnią przedstawiono na rys.4. Jeżeli odchyłka e = y - yz jest zawarta w przedziale -H/2 < e < +H/2, to możliwe są dwa stany wyjściowe: u = umax , lub Umin . Charakterystyka jest więc w tym przedziale niejednoznaczna. Zmiana stanu wyjściowego regulatora z Umin na Umax następuje wówczas, gdy odchyłka przekroczy wartość e = - H/2 i odwrotnie: z Umax na Umin' gdy odchyłka zmaleje poniżej wartości e = -H/2. H jest szerokością strefy histerezy i zależy od konstrukcji regulatora. W niektórych regulatorami szerokość strefy histerezy można zmieniać w pewnym zakresie.
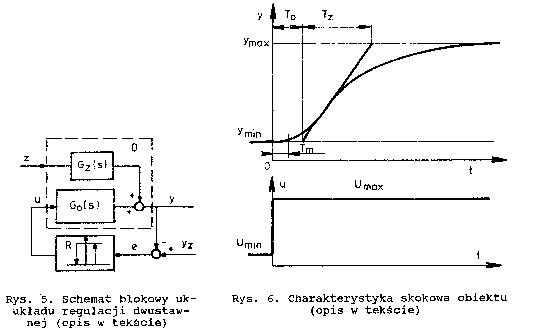
3. Układ regulacji dwustawnej
Schemat blokowy układu regulacji dwustawnej pokazano na rys.5, a charakterystykę skokową obiektu regulacji przedstawiono na rys.6. Jeżeli na wejście obiektu załączymy Umax, to w czasie t →* sygnał wyjściowy obiektu osiągnie wartość ymax. Odpowiednio dla u = Umin otrzymamy wartość ymin . Z charakterystyki skokowej obiektu wyznaczono:
Tm - czas martwy obiektu (charakterystyczna właściwość obiektu polegająca na przedłużeniu stanu istniejącego przed wymuszeniem),
To - opóźnienie zastępcze obiektu,
Tz - stała czasowa obiektu zastępcza.
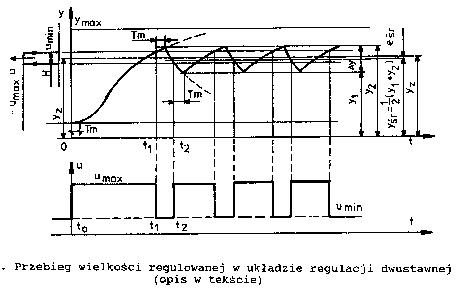
Wykres przebiegu temperatury w układzie regulacji dwustawnej pokazano na rys.7. W chwili t0 na wejście obiektu jest załączone napięcie Umax, temperatura y w obiekcie narasta. W chwili t1 temperatura obiektu osiągnęła wartość yz + H/2. W tym momencie regulator wyłączy grzanie (u =
Umin). Pomimo to temperatura obiektu nadal narasta przez czas Tm, po czym zaczyna maleć. W chwili t2 temperatura zmalała do wartości y z - H/2. Regulator załączył grzanie (Umax). Jednak temperatura nadal maleje i dopiero po czasie Tm nastąpi ponowny jej wzrost. Omuwiony cykl powtarza się.
Wielkość regulowana oscyluje między y1 i y2 z amplitudą *y = y2-y1. Amplitudę oscylacji wyznacza w przybliżeniu zależność: *y = H + Tm/Tz (ymax - ymin). (1) Jak widać, jedną z wielkości decydujących o amplitudzie, jest stosunek Tm/Tz . W praktyce jako kryterium stosowalności regulacji dwustawnej przyjęto T0 / Tz < 0,1 (0,2). Amplitudę oscylacji można zmniejszyć dobierając: wartości ymax i ymin.,
regulator o małej strefie histerezy lub z histerezą ujemną oraz regulatory z członami korekcyjnymi. Wartość średnia przebiegu yśr = (y2 + y1)/2. różni się od wartości zadanej Yz o odchyłkę eśr = yz -yśr Wielkość tej odchyłki można określić wzorem przybliżonym: eśr = (yz - (ymax - ymin)/2 ) (Tm/Tz). (4) ;
Odchyłka eśr jest więc równa zeru tylko dla przypadku 0,5 (ymax - ymin) = yx ; Ze wzoru (4) można wywnioskować, iż zakłócenie z (zmieniające wartości ymax lub ymin) będzie miało Tm/Tz razy mniejszy wpływ niż w układzie bez regulatora. Układ zachowuje się więc jak proporcjonalny.
Przedstawione rozważania oparto na założeniu, ze amplituda oscylacji jest niewielka, a właściwości dynamiczne obiektu zbliżone do właściwości członu inercyjnego I. rzędu z opóźnieniem. Otrzymane zależności (1) i (4) są więc jedynie przybliżeniem rzeczywistych zależności i można je stosować dla obiektów z inercyjnością pierwszego i drugiego rzędu.
4. Regulatory dwustawne z korekcją
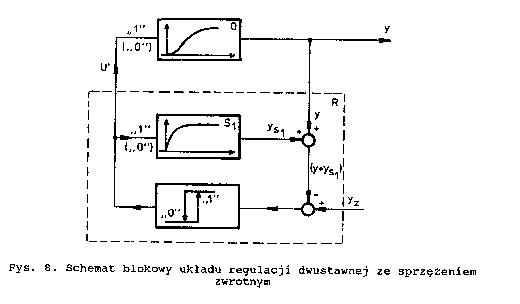
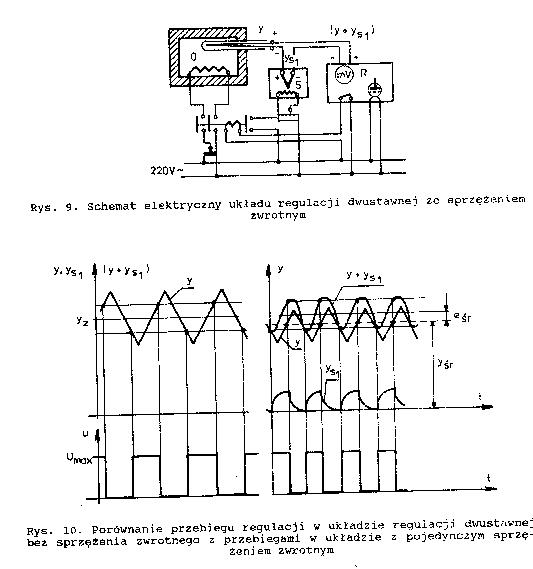
Zmniejszenie amplitudy oscylacji wielkości regulowanej, w układzie regulacji dwustawnej, można uzyskać dzięki zastosowaniu regulatora z korekcyjnym sprzężeniem zwrotnym. Schemat blokowy układu regulacji dwustawnej z inercyjny: sprzężeniem zwrotnym pokazano na rys.8. Stała czasowa T członu w sprzężeniu zwrotnym powinna być znacznie mniejsza od zastępczej stałej czasowej Tz obiektu regulacji. Przykład realizacji takiego układu przedstawiono na rys.9, a przebieg regulacji w tym układzie na rys. l0. Jak widać z rysunku 10, po zastosowaniu pojedynczego sprzężenia zwrotnego wzrosła częstotliwość oscylacji, zmalała amplituda wahań, wystąpiła natomiast różnica między wartością średnią yśr a zadaną yz. Odchyłkę tę można zmniejszyć przez zastosowanie drugiego inercyjnego sprzężenia zwrotnego (rys.11). Regulator dwustawny z pojedynczym inercyjnym sprzężeniem zwrotnym ma właściwości zbliżone do regulatora PD. Regulator z dwoma członami inercyjnymi w sprzężeniu ma natomiast charakter zbliżony do PID. Za wielkość wyjściową regulatora uważa się wówczas wartość średnią przebiegu u(t.).
Wyszukiwarka
Podobne podstrony:
Automatyka (wyk 3i4) Przel zawory reg
Automatyzacja w KiC (w 2) Obiekty reg
ns EiT 1 2st ang 2008
BD 2st 1 2 w05 tresc 1 1
teorie roz reg, ściągi 2 rok ekonomia 1 sem
ZESTAWY reg
BD 2st 1 2 w01 tresc 1 1 (2)
BD 2st 1 2 w07 tresc 1 1 kolor
index reg p0 p9
06 reg dwustawna
AVT 5094 Reg Temp
reg lov pol, LOVATO
BD 2st 1 2 w10 tresc 1 1
tr cw 7 reg temp
Modele matematyczne ukladow reg Nieznany
ZSBD 2st 1 2 w11 tresc 1 5 kolor
Biologiczne iagrot aspekty reg zachwsczenia (2)
reg prac
więcej podobnych podstron