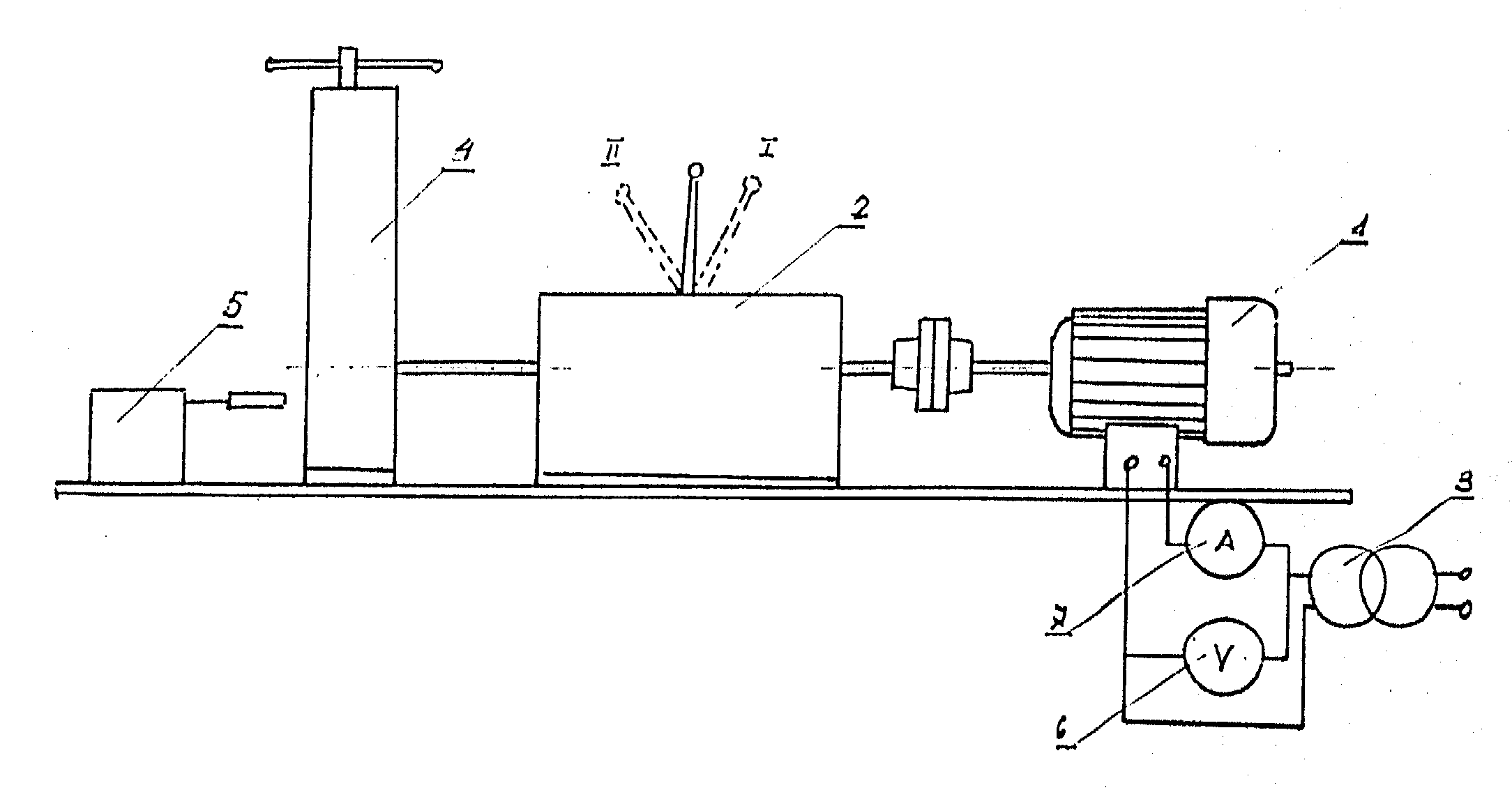
SCHEMAT STANOWISKA POMIAROWEGO
Do najbardziej rozpowszechnionych przekładni mechanicznych należą przekładnie kołowe, w których elementami przekazującymi ruch i obciążenie są koła.
Przekładnie dzielimy na:
cierne (cięgnowe i bezcięgnowe),
kształtowe (zębate i łańcuchowe).
Z przekładni kołowych do najbardziej rozpowszechnionych należą przekładnie kołowe zębate. W zależności od wzajemnego położenia osi kół rozróżniamy przekładnie:
równoległe (walcowe),
kątowe (stożkowe),
wichrowate (śrubowe).
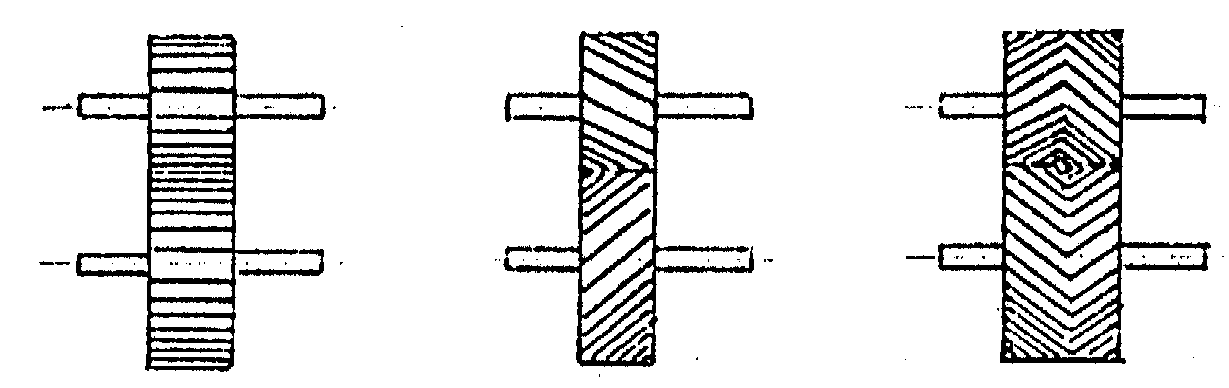
Rys.1 Przekładnie równoległe
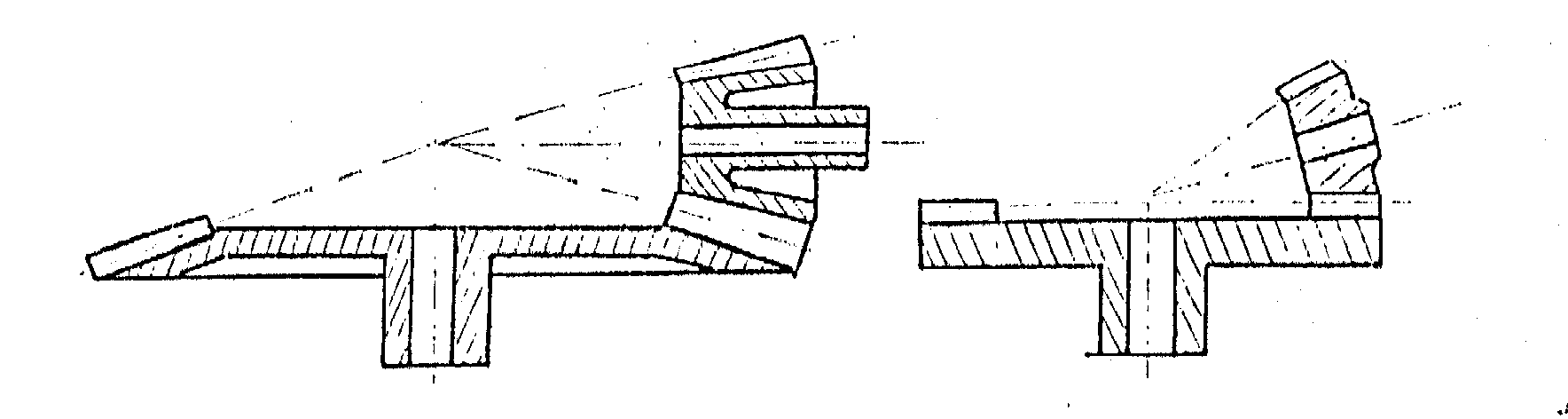
Rys.2 Przekładnie kątowe
W zależności od wzajemnego położenia wieńców kół rozróżniamy:
zewnętrzne (o zazębieniu zewnętrznym),
wewnętrzne (o zazębieniu wewnętrznym).
Ze względu na ilość przełożeń przekładnie dzielimy na:
zwalniające (reduktory) i > 1
przyspieszające (multiplikatory) i < 1
iab = ωa / ωb = na / nb
W praktyce najczęściej stosuje się reduktory ze względu na stosunkowo wysokie obroty silników. Do najważniejszych warunków pracy przekładni, tzw. „dobroci przełożenia” zaliczamy:
warunek stałości przełożenia,
warunek ciągłości przełożenia.
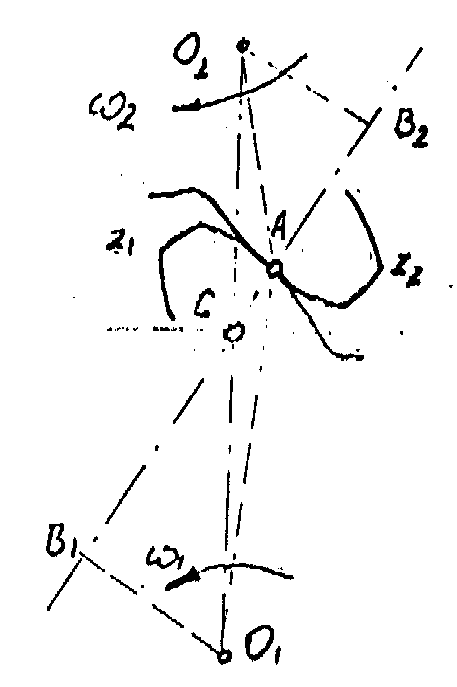
Warunek stałości przełożenia zostanie spełniony jeżeli centralny punkt C (punkt toczny) będzie leżał na linii 0102 łączącej środki kół i będzie dzielił tę linię w stałym stosunku równym liczbie przełożenia i.
Rys.3 Położenie punktu tocznego
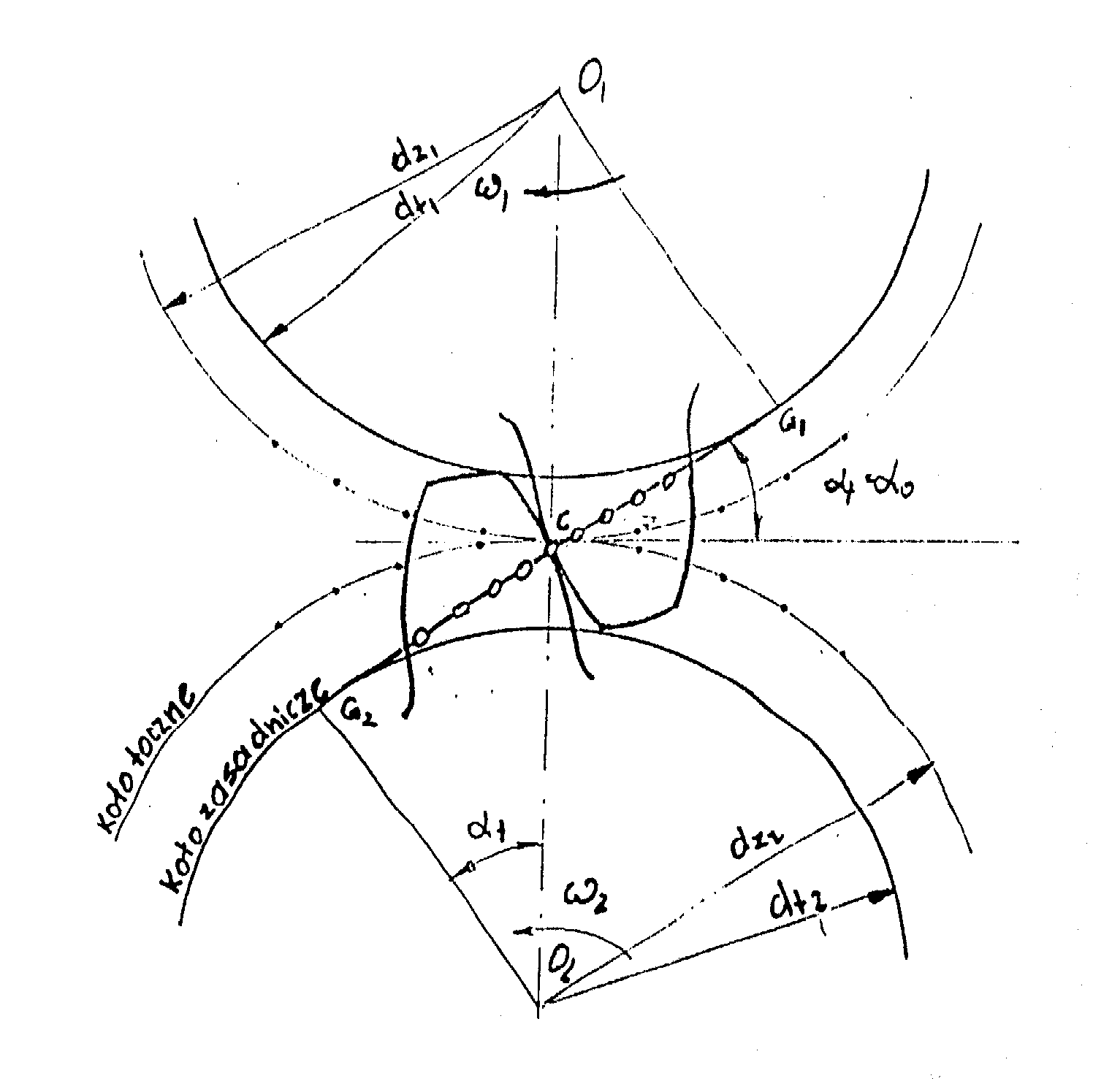
Współpraca kół zębatych polega na tym, że zęby jednego koła wchodzą we wręby drugiego koła, przy czym ząb koła napędzającego na ząb koła napędzanego powoduje jego obrót. Określamy wtedy, że zęby znajdują się w przyporze.
Rys.4 Podstawowe zależności przy zazębieniu ewolwentowym
Warunkiem nieprzerwanej i spokojnej pracy przekładni (ciągłości zazębienia) jest, aby następna para zębów weszła w zazębienie zanim pierwsza para zębów wyjdzie z zazębienia. W związku z tym wprowadzono pojęcie liczby przyporu (ε), definiowanej jako stosunek łuku przyporu lo do podziałki nominalnej to.
ε = lo / to
Liczba przyporu musi być większa od jedności, zaleca się jej wartość ε=1.2
Cechy przekładni zębatych:
przenoszą ruch obrotowy z jednego koła na drugie, najczęściej z jednoczesną zmianą prędkości i momentu obrotowego,
mogą przenosić duże moce,
posiadają wysoką sprawność,
wymagają smarowania,
posiadają zwartą konstrukcję i stosunkowo niski ciężar,
w pracy są niezawodne,
podczas pracy niektóre przekładnie powodują znaczny hałas,
pozwalają uzyskiwać duże przełożenia.
PRZEBIEG DOŚWIADCZENIA:
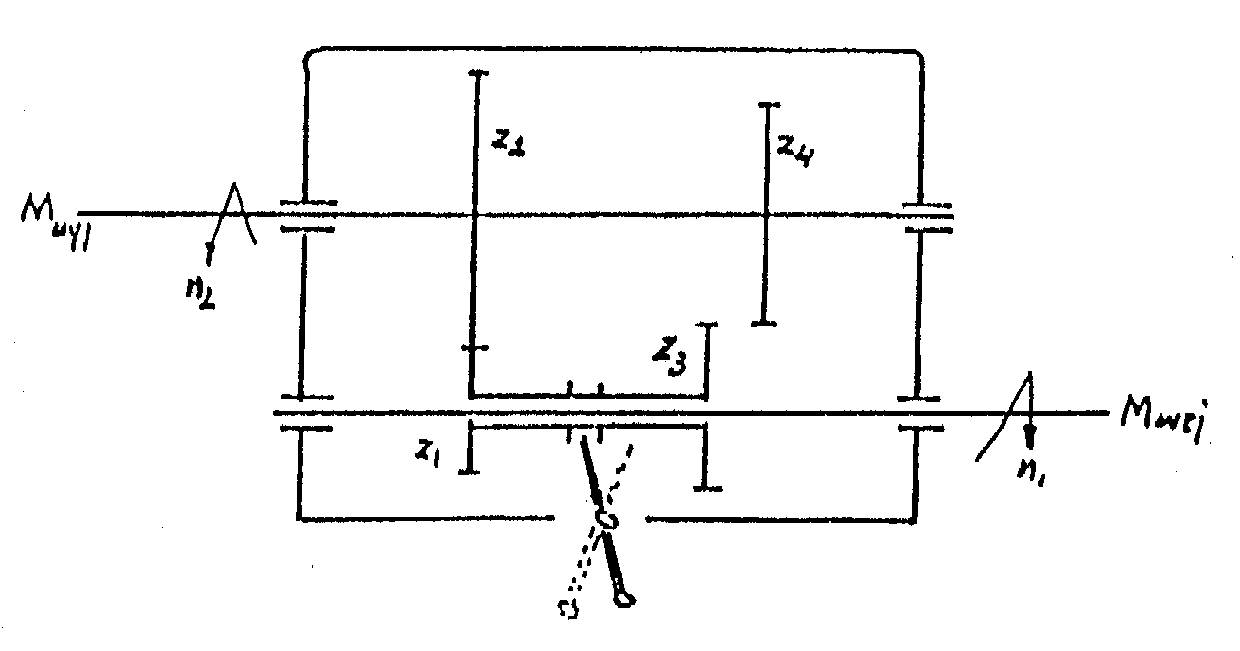
Rys.5 Schemat kinematyczny przekładni
Przy pomocy autotransformatora ustalić moc wejściową silnika i zmierzyć obroty wejściowe n1
Obliczyć mement wejściowy ze wzoru:
Następnie przez wybranie określonego przełożenia i12, i34 oraz pomiar obrotów wyjściowych n2 oraz siły hamowania określić moment na wyjściu.
Określić sprawność przekładni na poszczególnych przełożeniach.
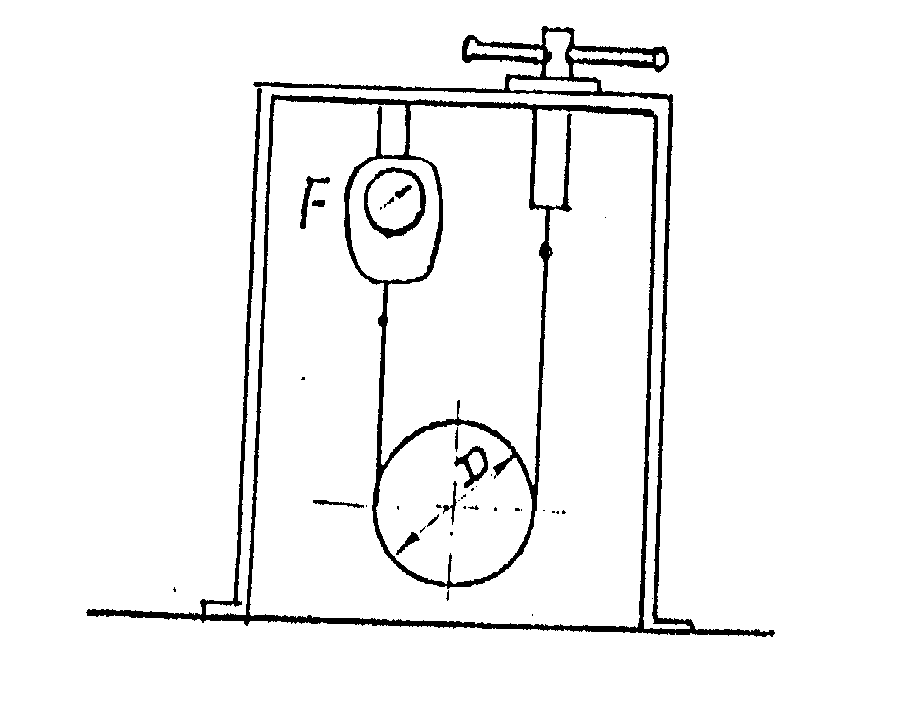
Rys.6 Schemat hamulca
TABELA POMIAROWA:
Położenie |
F |
n1 |
n2 |
i21 |
i34 |
U |
I |
P |
Mwej |
Mwyj |
|
N |
obr/min |
obr/min |
|
|
V |
A |
kW |
Nm |
Nm |
1 I 2 3 |
49 |
0,96 |
940 |
1,93 |
|
220 |
4,5 |
0,495 |
3613 |
2,94 |
|
69 |
0,96 |
920 |
1,93 |
|
220 |
5,8 |
0,638 |
3613 |
4,14 |
|
88 |
0,96 |
900 |
1,93 |
|
220 |
8 |
0,88 |
3613 |
5,28 |
1 II 2 3 |
49 |
0,96 |
780 |
|
1,62 |
220 |
4,1 |
0,451 |
3613 |
2,94 |
|
69 |
0,96 |
760 |
|
1,62 |
220 |
5 |
0,55 |
3613 |
4,14 |
|
88 |
0,96 |
750 |
|
1,62 |
220 |
6 |
0,66 |
3613 |
5,28 |
OBLICZENIA:
Wyszukiwarka
Podobne podstrony:
Ćw2 Badanie przekładni zębatej
projekt przekładnie zębate3
Przekładnie zębate 2
Przekładnie zębate
Badanie przekładnika prądowego v3
Badanie przekładnika prądowego v4
Przekładnie zębate
Obliczenia geometryczno wytrzymałościowe walcowej przekładni zębatej
Metrologia - Badanie przekładników napięciowych i prądowych, Gr. 3
Badanie przekładników prądowych, 1
Badanie przekładników prądowych, 1
Laboratorium TWN - Cw03 - Badanie przekładników prądowych i napięciowych - Skrypt , Studia dzienne -
Badanie przekładnika prądowego
Przekładnie zębate korekcja zazębienia
Koła i przekładnie zębate
PROJEKTY Z PKM, AGH, Semestr 5, PKM całość, PKM akademiki I, PKM-projekty, Projekt przekładni zębate
Badanie przekładnika prądowego v2
Przekladnie zebate
więcej podobnych podstron