BŁĄD DYNAMICZNY POMIARU
JEŻELI WSZYSTKIE WIELKOŚCI MIERZONE I WYNIKI POMIARU SĄ FUNKCJAMI CZASU TO BŁĄD TEGO POMIARU TEŻ JEST FUNKCJĄ CZASU.
BŁĄD DYNAMICZNY TO JEST ODLEGŁOŚĆ POMIĘDZY PRZEBIEGIEM (FUNKCJĄ CZASU) WYNIKU POMIARU I WIELKOŚCI MIERZONEJ. W ZALEŻNOŚCI OD PRZESTRZENI FUNKCYJNEJ, W KTÓREJ ZDEFINIOWANE SĄ: WIELKOŚĆ MIERZONA I WYNIK POMIARU MOŻEMY W RÓŻNY SPOSÓB ZDEFINIOWAĆ KRYTERIUM TEGO BŁĘDU.
BŁĄD CAŁKOWY - definiuje błąd dynamiczny w sensie powierzchni pomiędzy przebiegami w zadanym czasie (0 -T) obserwacji (pomiaru)
BŁĄD MAKSYMALNY - największa odległość między przebiegami w zadanym czasie (czas 0-T podzielony na M momentów) obserwacji (pomiaru)
CHARAKTERYSTYKI DYNAMICZNE PRZYRZĄDÓW POMIAROWYCH
NAJBARDZIEJ OGÓLNĄ, ALE TEŻ NAJSZERSZĄ CHARAKTERYSTYKĄ DYNAMICZNĄ URZĄDZENIA POMIAROWEGO JEST JEGO MODEL MATEMATYCZNY. Znając model sygnału pomiarowego i model urządzenia pomiarowego możemy określić model, przebieg czasowy wyniku pomiaru.
CELEM OKREŚLANIA DLA URZĄDZEŃ POMIAROWYCH WARTOŚCI BŁĘDÓW JEST MOŻLIWOŚĆ DOBORU (PORÓWNYWANIA) TYCH URZĄDZEŃ ,TAK ABY WYKONAĆ POMIAR Z JAK NAJMNIESZYM BŁĘDEM.
MODELE MATEMATYCZNE NIE MOGĄ BYĆ POSTAWĄ (ŁATWĄ) DLA PORÓWNYWANIA URZĄDZEŃ, KTÓRE REPREZENTUJĄ.UŻYTECZNE CHARAKTERYSTYKI DYNAMICZNE MUSZĄ, WIĘC MIEĆ POSTAĆ LICZB, ABY MOŻNA ZA ICH POMOCĄ PORÓWNYWAĆ URZĄDZENIA POMIAROWE
BUDUJE SIĘ, WIĘC MODELE UPROSZCZONE, KTÓRE MAJĄ CHARAKTER ODPOWIEDZI URZĄDZENIA (LUB JEGO MODELU) NA STANDARDOWE WYMUSZENIA (WIELKOŚCI MIERZONE) TESTOWE
NAJCZĘŚCIEJ STOSOWANE WYMUSZENIA TESTOWE:
SKOK JEDNOSTKOWY 1(t) - CHARAKTERYSTYKA DYNAMICZNA CZASOWA - ODPOWIEDŹ NA SKOK JEDNOSTKOWY
SYGNAŁ POLIHARMONICZNY ΣSIN( ωi .t+ϕ i) - CHARAKTERYSTYKA DYNAMICZNA CZĘSTOTLIWOŚCIOWA - CHARAKTERYSTYKI: AMPLITUDOWO- CZĘSTOTLIWOŚCIOWA I FAZOWO- CZĘSTOTLIWOSCIOWA
OBIE CHARAKTERYSTYKI DALEJ MAJĄ KSZTAŁT PRZEBIEGÓW I ABY MOŻNA ICH UŻYĆ DO PORÓWNANIA URZADZEŃ POMIAROWYCH NALEŻY TYM CHARATERYSTYKOM PRZYPISAĆ LICZBY OKREŚLAJĄCE ICH WŁASCIWOŚCI.
CHARAKTERYSTYKA DYNAMICZNA CZASOWA - ODPOWIEDŹ NA SKOK JEDNOSTKOWY PARAMETR : STAŁA CZASOWA
PRZYKŁADOWO: Transmitancja operatorowa przetwornika pomiarowego I-go rzędu ma postać:
a odpowiedź czasowa takiego układu na skok jednostkowy o amplitudzie A ma postać przebiegu o równaniu:
Sposób wyznaczenia stałej czasowej jest przedstawiony na poniższym rysunku:
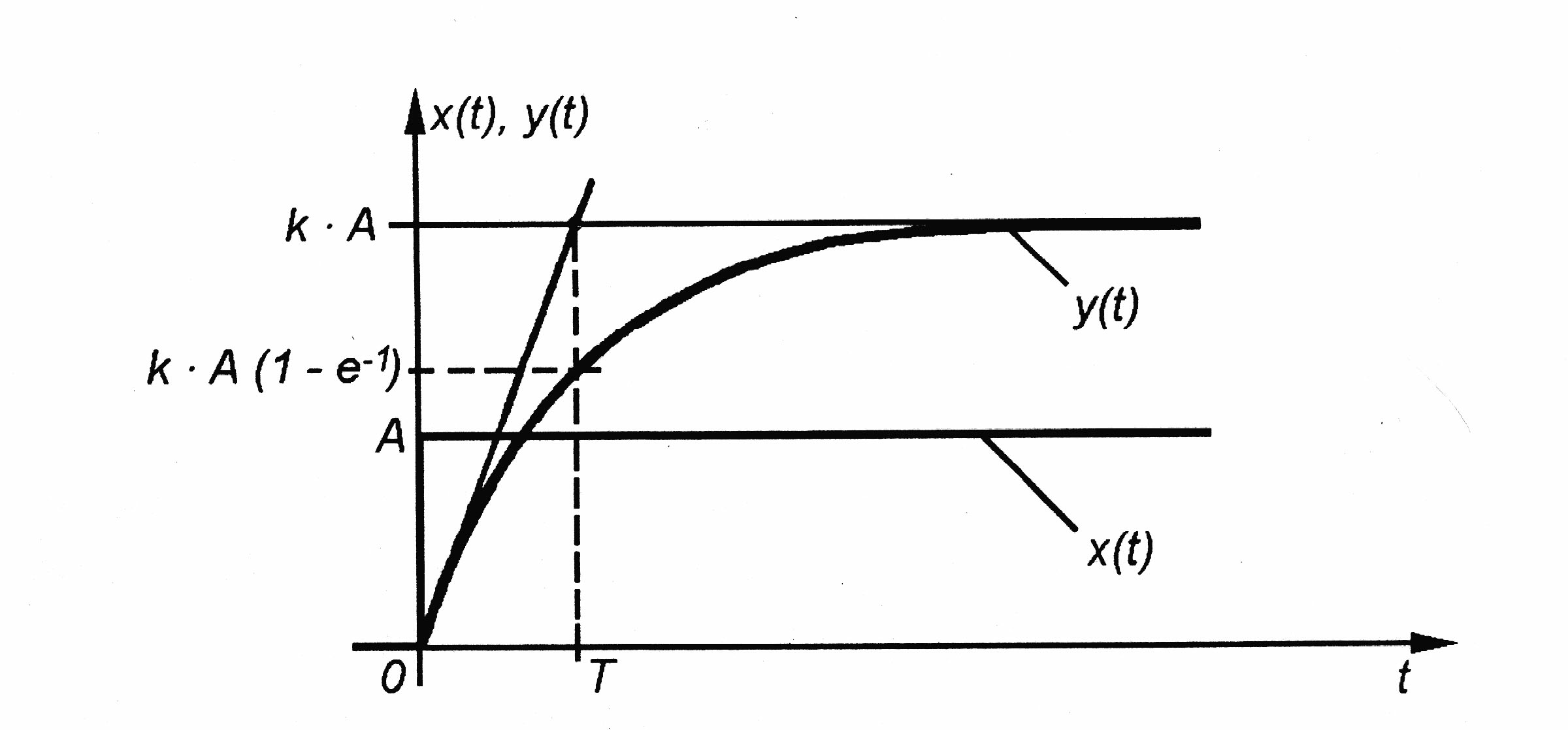
Stała czasowa T określa czasowe własności dynamiczne urządzenia pomiarowego
CHARAKTERYSTYKA DYNAMICZNA CZĘSTOTLIWOŚCIOWA - CHARAKTERYSTYKI: AMPLITUDOWO- CZĘSTOTLIWOŚCIOWA I FAZOWO- CZĘSTOTLIWOSCIOWA
PRZYKŁADOWO: Transmitancja widmowa przetwornika I-go rzędu
Jeżeli amplitudę sinusoidalnego napięcia o pulsacji ω podanego na wejście tego przetwornika oznaczymy Uwe, a amplitudę napięcia wyjściowego jako Uwy to charakterystyka amplitudowo-częstotliwościowa tego przetwornika to zależność
A charakterystyka fazowo-częstotliwościowa to zależność
gdzie φ to przesunięcie fazowe między napięciami wejściowym a wyjściowym.
PARAMETRAMI LICZBOWYMI CHARAKTERYSTYKI FAZOWEJ BYĆ PRZYKŁADOWO:
częstotliwościowy zakres liniowości charakterystyki
stopień nieliniowości w pewnym zakresie częstotliwości
PARAMETRAMI LICZBOWYMI CHARAKTERYSTYKI AMPLITUDOWEJ MOGĄ BYĆ PRZYKŁADOWO:
częstotliwościowy zakres stałości stosunku amplitud (charakter: dolno-, górno-, środkowo- przepustowy)
wzmocnienie w określonym zakresie częstotliwości
CHARAKTERYSTYKI STATYCZNE PRZYRZĄDÓW POMIAROWYCH
Właściwości statyczne, nie zmieniające się w czasie, urządzeń pomiarowych, opisują ich charakterystyki statyczne
Wszystko co dzieje w trakcie pomiarów jest dynamiczne.
STATYKA JEST WIĘC UPROSZCZENIEM.
Model statyczny jest więc kolejnym uproszczeniem ogólnego modelu urządzenia pomiarowego, zakładającym że wielkości mierzone i wyniki pomiarów są niezmienne w czasie pomiaru. Nie są funkcjami czasu w okresie naszej obserwacji.
Charakterystyka statyczna urządzenia pomiarowego jest więc to zależność:
Uwy = f ( Uwe )
PARAMETRAMI LICZBOWYMI CHARAKTERYSTYKI STATYCZNEJ MOGĄ BYĆ PRZYKŁADOWO:
zakres
czułość (nachylenie )
zakres liniowości
błąd (np. maksymalny) nieliniowości
błąd (przesunięcie) zera
Parametry te mogą być zdefiniowane w różny sposób dla przyrządów analogowych i cyfrowych.
1
Wyszukiwarka
Podobne podstrony:
Błąd i niepewność pomiaru
Wykład 13 błąd i niepewność pomiaru
Błąd i niepewność pomiaru
sprawozdanie silnik prądu stałego obcowzbudny rozruch?z obciążenia na wale pomiary dynamiczne
Badanie własności dynamicznych przetworników pomiarowych
Pomiary w warunkach dynamicznych
Monitoring środowiskaĆW Charakterystyki statyczne i dynamiczne przyrządów pomiarowych Sprawozdan
Charakterystyki dynamiczne, Politechnika Warszawska Wydział Transportu, Semestr VI, Technoka Pomiaro
sprawozdanie pomiary w warunkach dynamicznych
5. Właściwości statyczne i dynamiczne przetworników pomiarowych, Rok II, Semestr 4, P. T. S. i S
Błąd pomiaru natężenia, Mechanika i Budowa Maszyn PWR MiBM, Semestr I, Fizyka, laborki, sprawozdania
Pomiar kąta pionowego i błąd miejsca zera
blad syst 2008 student, Studia, Semestr 3, Technologia Informacyjno-Pomiarowa, Wykłady
Pomiar lepkości dynamicznej i kinematycznej metodą swobodnego opadania ciała, SGGW Technika Rolnicza
Metrologia wyznaczanie charakterystyki dynamicznej przetwornika pomiarowego
więcej podobnych podstron