W Y Ż S Z A |
Zakład Automatyki Okrętowej |
Nazwisko i imię |
|||
S Z K O Ł A M O R S K A w S Z C Z E C I N I E
WYDZIAŁ MECHANICZNY |
Nr ćw.
17
|
Temat ćwiczenia:
ZAWORY |
Manszewski Karol Ogrodnik Roman Liana Sebastian |
||
Data wyk. ćwicz.
09.05.2002r. |
Data odd. spr.
|
Ocena |
Podpis wykł. |
GRUPA IV MB
|
|
Podstawowe dane techniczne pozycjonera SRD991
Rys.1. Widok pozycjonerów zainstalowanych na zaworach różnego typu
2. Wiadomości ogólne
Inteligentny elektro - pneumatyczny pozycjoner SRD 991 jest przeznaczony do obsługi siłowników zaworów pneumatycznych w systemach sterowania i regulatorach elektronicznych używających sygnału komunikacyjnego HART przekładanego na analogowy sygnał sterujący 4 ÷ 20 mA. Czysta praca cyfrowa jest dostępna przy użyciu komunikacji cyfrowej FOXCOM przez system szeregowy I/A.
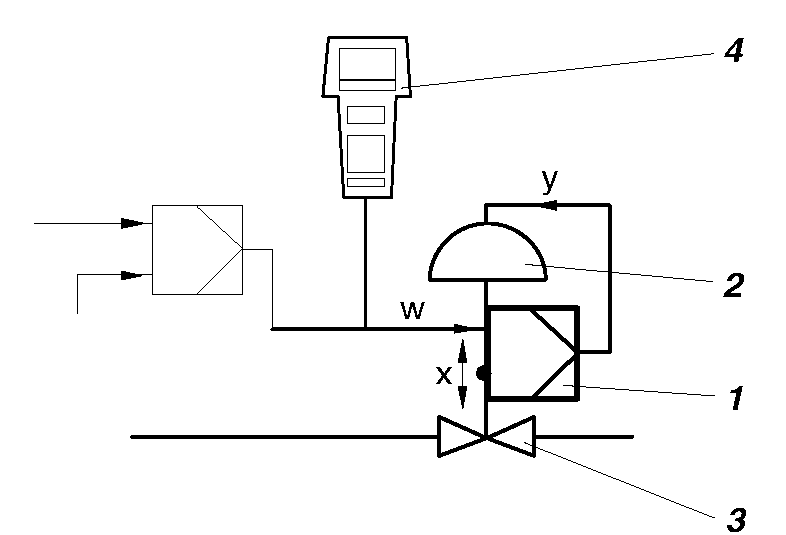
Pętla sterowania została przedstawiona na rysunku 2. Inteligentny pozycjoner 1 i siłownik pneumatyczny 2 działają w obwodzie sterowania, gdzie wejściowa wartość zadana w jest wyprowadzana z regulatora nadrzędnego lub systemu operatorskiego, wyjściem natomiast jest sygnał ciśnienia y i pozycja x siłownika na zaworze 3. Pozycjoner może być podłączony zarówno do siłowników liniowych jak i obrotowych. Siłowniki wyposażone w sprężyny są sterowane przy pomocy pozycjonerów pojedynczego działania. Siłowniki bez sprężyn są sterowane przez pozycjonery podwójnego działania. Pozycjoner może być obsługiwany lokalnie za pomocą klawiszy lokalnych. Wersje pozycjonera HART i FOXCOM mogą być obsługiwane lokalnie lub zdalnie za pośrednictwem przenośnego terminala ręcznego 4 lub szeregowego systemu I/A (FOXCOM). Dla powietrza zasilającego zaleca się stosowanie regulatora filtrującego FOXBORO ECKARDT FRS923.
Rys.2. Schemat blokowy pętli sterowania z wykorzystaniem pozycjonera
Cechy pozycjonera:
Autostart
Autodiagnostyka
Komunikacja HART lub FOXCOM
Konfiguracja za pośrednictwem klawiszy lokalnych, przenośnego terminala ręcznego, komputera PC lub systemu szeregowego I/A.
Niski pobór powietrza
Niskie wibracje we wszystkich kierunkach
Skok 8 do 100 mm (0,3 do 4 cali)
Zasięg kątowy do 95°
Łatwa obsługa przy użyciu trzech klawiszy
Ciśnienie powietrza zasilającego do 6 bar (90 psig)
Działanie pojedyncze lub podwójne
Mechaniczny wskaźnik ruchu (położenia)
Montaż na siłownikach liniowych bezpośrednio lub zgodnie z IEC 534
Montaż na siłownikach obrotowych zgodnych z VDI/VDE 3854
Klasa ochrony IP 65 oraz NEMA 4
Ochrona eksplozyjna: EEx ia IIC T4 oraz EEx ia IIC T6 zgodnie z CENELEC lub „faktyczne bezpieczeństwo” zgodnie z FM i CSA
Wbudowany niezależne graniczne przełączniki indukcyjne (opcjonalnie)
Czujniki ciśnienia powietrza zasilającego i ciśnienia wyjściowego (opcjonalnie)
Przekaźnik wspomagający do minimalizacji czasu skoku (opcjonalnie
Rys.3. Pozycjoner typu dźwigniowego IP300
Budowa:
1. Siłownik
2. Trzon zaworu
Dźwignia sprzężenia zwrotnego
Sprężyna sprzężenia zwrotnego
Komora stałego ciśnienia
Zawór pilotujący
Suwak
Dźwignia
Sworzeń dźwigni
Szpilka dźwigni
Przesłona
Komora wejściowa
Zawór obejścia
4. Opis działania
Działanie pozycjonera omówione jest na przykładzie pozycjonera typu dźwigniowego pojedynczego działania - dla przypadku rosnącej wartości sygnału sterującego. Sygnał sterujący (IN) z regulatora zasila komorę wejściową (12) przez zawór obejścia (13). Różnica powierzchni pomiędzy membranami generuję siłę, która przemieszcza przesłonę (11) w lewo. Ponieważ odległość pomiędzy przesłoną i dyszą zwiększa się, ciśnienie kaskadowe przed zespołem membran maleje, w tym samym czasie powietrze zasilające (SUP) dostarczone jest do zespołu membran (5). Suwak (7) połączony na stałe z zespołem membran przesuwa się w prawo otwierając zawór (6), powietrze zasilające podawane jest przez zawór (13) na wyjście (OUT1). W wyniku tego membrana siłownika (1) zaczyna przesuwać trzon zaworu (2), ruch ten jest zamieniany jest na obrót (dźwignią 9) regulując tym samym sprężynę sprzężenia zwrotnego (4), siłownik kontynuje ruch do momentu kiedy siła sprężyny (4) działającej na przesłonę (11) i siła pochodząca od sygnału sterującego (IN) nie zostaną zrównoważone. W konsekwencji trzon zaworu (2) jest zawsze precyzyjnie proporcjonalny do wartości sygnału sterującego.
Kalibracja
a) ustawienie punktu zerowego - dokonuje się poprzez obrót pokrętła
punktu zerowego, a tym samym zmiany napięcia sprężyny
sprzężenia zwrotnego,
ustawienie skoku zaworu - regulowane jest przez zmianę
efektywnej ilości zwojów sprężyny sprzężenia zwrotnego pokrętłem umieszczonym w sprężynie sprzężenia zwrotnego,
ustawienie czułości - odbywa się przy użyciu śruby. Nie należy
ruszać śruby regulacyjnej, dopóki nie przekonamy się, że czułość pozycjonera rzeczywiście nie odpowiada zamontowanemu członowi wykonawczemu,
6. Odłączenie
Odcięcie zasilania pozycjonetra z regulatora można dokonywać przy
pomocy zaworu obejściowego (by-pass). Ustawiając zawór w
odpowiedniej pozycji uzyskujemy zasilanie sygnałem sterującym bądź
pozycjonera bądź to siłownika.
Wyszukiwarka
Podobne podstrony:
spis lab I sem 2010
zawory 5 2
38 Zawory hydrauliczne
Automatyka (wyk 3i4) Przel zawory reg
III WWL DIAGN LAB CHORÓB NEREK i DRÓG MOCZ
Diagnostyka lab wod elektrolit
ZW LAB USTAWY, OCHRONA
LAB PROCEDURY I FUNKCJE
Zawory
sprzet lab profilografy
sprzet lab mikromanometry
Mechanika Plynow Lab, Sitka Pro Nieznany
Lab 02 2011 2012
PO lab 5 id 364195 Nieznany
lab pkm 4
MSIB Instrukcja do Cw Lab krystalizacja
więcej podobnych podstron