POLITECHNIKA POZNAŃSKA INSTYTUT ELEKTROTECHNIKI PRZEMYSŁOWEJ |
Laboratorium Maszyn Elektrycznych |
Rok Akad. 1999/2000 |
Wydział: elektryczny Kierunek: AiR Rok studiów: 3, sem. 5 |
Ćwiczenie nr 2 Temat: Badanie maszyn indukcyjnych. |
|
Wykonujący ćwiczenie:
|
Data wykonania ćwiczenia: 17.11.99
Data oddania sprawozdania: 24.11.99 |
Zaliczenie: |
Wstęp
Maszyny indukcyjne należą do maszyn asynchronicznych, ponieważ przy zmianach obciążenia stosunek prędkości obrotowej wirnika do częstotliwości napięcia zasilającego jest wielkością zmienną.
Maszyny indukcyjne stanowią szczególny przypadek maszyn asynchronicznych, polegający na tym, że prąd w obwodzie wtórnym maszyny płynie wyłącznie pod wpływem siły elektromotorycznej powstałej na zasadzie indukcji elektromagnetycznej.
Uzwojenia maszyn indukcyjnych są rozłożone w żłobkach stojana oraz wirnika. Wirniki maszyn trójfazowych są wykonywane z pierścieniami ślizgowymi lub bez pierścieni ślizgowych. Uzwojenia wirników z pierścieniami ślizgowymi wykonuje się z cewek jedno lub wielozwojowych, tak jak uzwojenia stojana. Maszyny, których wirniki mają pierścienie ślizgowe nazywa się maszynami pierścieniowymi. Uzwojenia wirników maszyn pierścieniowych mogą być skojarzone w gwiazdę lub trójkąt.
Początki uzwojeń wirnika dołączone są do trzech pierścieni ślizgowych, po których ślizgają się szczotki łączące wirujące uzwojenie z tabliczką zaciskową maszyny umieszczoną na stojanie.
Wirnik bez pierścieni ślizgowych ma uzwojenie wykonane w formie prętów, zwykle nie izolowanych, zwartych na obu końcach wirnika. Pręty uzwojenia tworzą klatkę, dlatego maszynę posiadającą wirnik bez pierścieni ślizgowych nazywa się maszyną klatkową.
Badanie maszyny indukcyjnej pierścieniowej (nr 267928).
Parametry znamionowe odczytane z tabliczki:
Moc: 3,3 kW
Napięcie: 380 V przy połączeniu w trójkąt
Prąd stojana: 9,5 A przy połączeniu w trójkąt
Napięcie wirnika: 95 V
Prąd wirnika 25A
Wirnik połączony w gwiazdę.
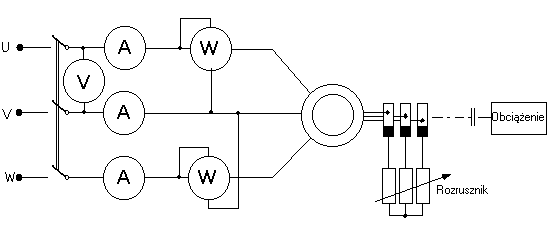
Schemat połączeń:
Próba zwarcia:
Zwarcie maszyny to stan, w którym prędkość kątowa wirnika ω=0 przy jednoczesnym zasilaniu uzwojenia stojana. Dokonaliśmy tego mocując mechanicznie (przy pomocy śrub) obejmę do wirnika i obudowy maszyny, unieruchamiając w ten sposób wirnik.
Wyniki pomiarów i obliczeń przedstawia tabela. Przy obliczeniach wykorzystałem następujące wzory:
Tabela pomiarów i obliczeń:
U1 |
IU |
IV |
IW |
I1Z |
Pα |
Pβ |
P1Z |
Mrp |
Mrp |
cosϕz |
ZZ1 |
RZ1 |
Xz1 |
Izn |
Mrpn |
V |
A |
A |
A |
A |
W |
W |
W |
kpm |
Nm |
- |
Ω |
Ω |
Ω |
A |
Nm |
170,00 |
12,00 |
9,40 |
10,00 |
10,47 |
-240,00 |
1320,00 |
1080,00 |
0,51 |
5,00 |
0,35 |
9,38 |
3,29 |
8,78 |
23,40 |
24,99 |
164,00 |
10,00 |
9,00 |
9,50 |
9,50 |
-240,00 |
1240,00 |
1000,00 |
0,47 |
4,61 |
0,37 |
9,97 |
3,69 |
9,26 |
22,01 |
24,75 |
156,00 |
9,40 |
8,50 |
9,00 |
8,97 |
-240,00 |
1120,00 |
880,00 |
0,42 |
4,12 |
0,36 |
10,04 |
3,65 |
9,36 |
21,84 |
24,44 |
144,00 |
8,30 |
7,60 |
8,00 |
7,97 |
-240,00 |
880,00 |
640,00 |
0,35 |
3,43 |
0,32 |
10,44 |
3,36 |
9,88 |
21,02 |
23,90 |
128,00 |
7,20 |
6,60 |
7,00 |
6,93 |
-200,00 |
720,00 |
520,00 |
0,26 |
2,55 |
0,34 |
10,66 |
3,61 |
10,03 |
20,58 |
22,47 |
112,00 |
6,20 |
5,70 |
6,00 |
5,97 |
-160,00 |
520,00 |
360,00 |
0,20 |
1,96 |
0,31 |
10,84 |
3,37 |
10,30 |
20,24 |
22,58 |
96,00 |
5,10 |
4,70 |
5,00 |
4,93 |
-120,00 |
360,00 |
240,00 |
0,13 |
1,27 |
0,29 |
11,23 |
3,29 |
10,74 |
19,53 |
19,98 |
78,00 |
4,10 |
3,80 |
4,00 |
3,97 |
-80,00 |
240,00 |
160,00 |
0,08 |
0,78 |
0,30 |
11,35 |
3,39 |
10,84 |
19,32 |
18,62 |
58,00 |
3,00 |
2,80 |
3,00 |
2,93 |
-80,00 |
120,00 |
40,00 |
0,03 |
0,29 |
0,14 |
11,42 |
1,55 |
11,31 |
19,22 |
12,63 |
Idealny bieg jałowy
Jeżeli przez uzwojenie wtórne prąd nie przepływa, nie powstaje w maszynie indukcyjnej moment elektromagnetyczny.
Przez uzwojenie wtórne maszyny indukcyjnej prąd nie może płynąć, jeśli:
W uzwojeniu wtórnym nie indukuje się siła elektromotoryczna,
Obwód wtórny jest rozwarty.
W uzwojeniu wtórnym nie indukuje się siła elektromotoryczna, jeśli wirnik wiruje z prędkością równą prędkości pola wirującego, co jest możliwe tylko wówczas, gdy wirnik jest sprzężony z maszyną pomocniczą, która pokonując straty mechaniczne nadaje wirnikowi prędkość synchroniczną równą:
Taki stan nazywa się idealnym biegiem jałowym.
Tabela pomiarów i obliczeń:
U1 |
IU |
IV |
IW |
I10 |
Pα |
Pβ |
P10 |
n |
ω |
cosϕ |
Q10 |
V |
A |
A |
A |
A |
W |
W |
W |
obr/min |
1/s |
- |
var |
380,00 |
6,20 |
6,10 |
6,30 |
6,20 |
-960,00 |
1360,00 |
400,00 |
1000,00 |
104,72 |
0,10 |
4061,06 |
360,00 |
5,30 |
5,20 |
5,40 |
5,30 |
-840,00 |
1080,00 |
240,00 |
1001,00 |
104,82 |
0,07 |
3296,03 |
340,00 |
4,60 |
4,50 |
4,70 |
4,60 |
-680,00 |
920,00 |
240,00 |
999,00 |
104,62 |
0,09 |
2698,28 |
320,00 |
4,10 |
4,00 |
4,20 |
4,10 |
-600,00 |
760,00 |
160,00 |
998,00 |
104,51 |
0,07 |
2266,81 |
300,00 |
3,60 |
3,50 |
3,70 |
3,60 |
-520,00 |
640,00 |
120,00 |
1000,00 |
104,72 |
0,06 |
1866,76 |
280,00 |
3,40 |
3,30 |
3,40 |
3,37 |
-440,00 |
560,00 |
120,00 |
996,00 |
104,30 |
0,07 |
1628,33 |
240,00 |
2,60 |
2,50 |
2,60 |
2,57 |
-320,00 |
360,00 |
40,00 |
1002,00 |
104,93 |
0,04 |
1066,19 |
200,00 |
2,10 |
2,00 |
2,10 |
2,07 |
-240,00 |
240,00 |
0,00 |
1003,00 |
105,03 |
0,00 |
715,91 |
160,00 |
1,60 |
1,50 |
1,70 |
1,60 |
-160,00 |
160,00 |
0,00 |
1003,00 |
105,03 |
0,00 |
443,41 |
120,00 |
1,20 |
1,10 |
1,30 |
1,20 |
-120,00 |
80,00 |
-40,00 |
1003,00 |
105,03 |
-0,16 |
246,19 |
W oparciu o dane z tabeli sporządziłem następujące wykresy:
Stan obciążenia
Jeśli zwiększać stopniowo moment obciążenia na wale (obciążać silnik), maszyna przechodzi ze stanu pracy przy biegu jałowym do stanu obciążenia. Wielkości pomierzone oraz obliczone na podstawie tych pomiarów przedstawia tabela na następnej stronie.
Wzory, z których korzystałem w trakcie obliczeń:
Mrp[Nm]=9,81Mrp[kpm]
Tabela pomiarów i obliczeń dla maszyny w stanie obciążenia:
U1 |
IU |
IV |
IW |
I1 |
Pα |
Pβ |
P1 |
cosϕ |
s |
n |
ω |
Mrp |
Mrp |
V |
A |
A |
A |
A |
W |
W |
W |
- |
% |
obr/min |
1/s |
kpm |
Nm |
380,00 |
10,00 |
9,80 |
10,10 |
9,97 |
720,00 |
3640,00 |
4360,00 |
0,66 |
10,40 |
896,00 |
93,83 |
3,50 |
34,32 |
380,00 |
9,50 |
9,30 |
9,60 |
9,47 |
640,00 |
3440,00 |
4080,00 |
0,65 |
9,60 |
904,00 |
94,67 |
3,30 |
32,36 |
380,00 |
9,20 |
9,00 |
9,30 |
9,17 |
560,00 |
3280,00 |
3840,00 |
0,64 |
8,80 |
912,00 |
95,50 |
3,10 |
30,40 |
380,00 |
8,70 |
8,60 |
8,90 |
8,73 |
440,00 |
3120,00 |
3560,00 |
0,62 |
8,10 |
919,00 |
96,24 |
2,80 |
27,46 |
380,00 |
8,10 |
7,90 |
8,30 |
8,10 |
240,00 |
2840,00 |
3080,00 |
0,58 |
6,90 |
931,00 |
97,49 |
2,40 |
23,54 |
380,00 |
7,60 |
7,40 |
7,70 |
7,57 |
80,00 |
2560,00 |
2640,00 |
0,53 |
5,60 |
944,00 |
98,86 |
2,00 |
19,61 |
380,00 |
7,10 |
7,00 |
7,30 |
7,13 |
-120,00 |
2360,00 |
2240,00 |
0,48 |
5,00 |
950,00 |
99,48 |
1,60 |
15,69 |
380,00 |
6,80 |
6,60 |
7,00 |
6,80 |
-320,00 |
2120,00 |
1800,00 |
0,40 |
3,80 |
962,00 |
100,74 |
1,20 |
11,77 |
380,00 |
6,60 |
6,40 |
6,60 |
6,53 |
-520,00 |
1880,00 |
1360,00 |
0,32 |
3,00 |
970,00 |
101,58 |
0,80 |
7,85 |
380,00 |
6,40 |
6,20 |
6,40 |
6,33 |
-720,00 |
1640,00 |
920,00 |
0,22 |
1,80 |
982,00 |
102,83 |
0,40 |
3,92 |
|
6,10 |
6,00 |
6,20 |
6,10 |
-920,00 |
1360,00 |
440,00 |
0,11 |
0,00 |
1000,00 |
104,72 |
0,00 |
0,00 |
Wykonałem następujące wykresy:
1
6
Wyszukiwarka
Podobne podstrony:
Badanie maszyn indukcyjnych silnik klatkowy i pierścieniowy
Badanie maszyn indukcyjnych id Nieznany
Badanie maszyn indukcyjnych2
Badanie silnika indukcyjnego pierścieniowego, MASZYNY
Badanie silnika indukcyjnego pierścieniowego - b, MASZYNY
Badanie silnika indukcyjnego - l, Polibuda, IV semestr, SEM IV, Maszyny Elektryczne. Laboratorium, 0
Badanie rozkładu pola magnetycznego w maszynie indukcyjnej
Maszyna indukcyjna 2
Badanie maszyn pomiar nagrzewnicy powietrza
Badanie silnika indukcyjnego jednofazowego
Podstawowe zależności z teorii maszyn indukcyjnych
Badanie silnika indukcyjnego trójfazowego
Badanie maszyny synchronicznej
Zasada działania maszyny indukcyjnej a
Badanie maszyn
Maszyny indukcyjne
Badanie maszyn pomiar pompy wirowej
więcej podobnych podstron