Jakie rodzaje regulatorów, które są opisane w skrypcie „Regulatory” są stosowane na statkach lub w układach automatyki portowej?
Bardzo powszechnie stosowanymi regulatorami w automatyce portowej i okrętowej i okrętowej są regulatory konwencjonalne, mające algorytm P, I, D, PI, PD, PID. Szczególnie spotykanymi regulatorami w automatyce okrętowej są regulatory PID a ich pozycję szczególnie umocniło zastosowanie techniki cyfrowej, która to dała bardzo duże możliwości regulacji, to jest wykorzystanie nowych bardziej złożonych algorytmów.
Regulator PID
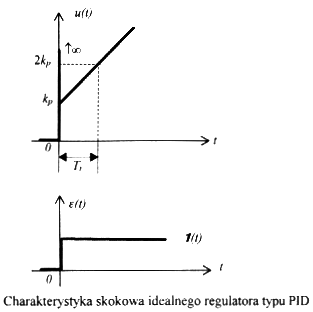
W idealnym regulatorze proporcjonalno - całkująco - proporcjonalnym sygnał wyjściowy u(t) jest proporcjonalny do sumy sygnału wejściowego ε(t), jego całki i pochodnej:
U(t) = kp { ε(t) +
ε(τ) dτ + Td
}
gdzie:
kp - współczynnik wzmocnienia
Ti - czas zdwojenia (całkowania)
Td - czas różniczkowania
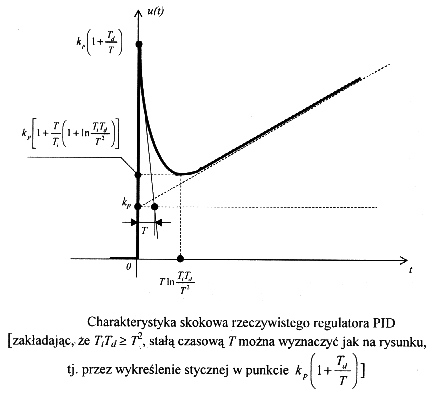
Wiemy że niemożliwe jest otrzymanie idealnego elementu różniczkującego tzn. bez inercji, dlatego dobra i właściwa praca tego regulatora powinna polegać na tym, że powinien on adoptować się do zmiennych dynamicznych własności obiektu.
A więc regulatory te stosuje się wszędzie tam, gdzie potrzebna jest bardziej skuteczniejsza reakcja na zmianę zakłóceń niż jak to jest z regulatorami P i PI, a przede wszystkim zapewnia on stabilniejszą pracę układu regulacji automatycznej.
Aby szybciej zlikwidować wpływ zakłóceń o charakterze trwałym, dopuszczalne jest skrócenie czasów zdwojenia czyli całkowania.
Gdy zastosujemy inne ale odpowiednie nastawy z regulatora tego możemy otrzymać inne algorytmy.
Ti = ∞ (max), Td = 0 (min) działanie typu P,
Td = 0 (min), kp = 0 (min) działanie typu I,
Td = 0 (min) działanie typu PI,
Ti = ∞ (max) działanie typu PD.
Regulatory nieciągłe
W automatyce okrętowej i przemysłowej bardzo często stosuje się regulatory z przekaźnikami, których charakterystyki należą do tzw. nieliniowości niejednoznacznych, niegładkich, czyli mających załamania wewnątrz rozpatrywanego przedziału zmian sygnału wejściowego. Takie nieliniowości nazywają się nieliniowościami nieanalitycznymi, a cechują się tym, że nie można ich opisać analitycznie w całym przedziale (dają się opisać analitycznie w kilku przedziałach pomiędzy szczególnymi punktami załamań).
Regulatory nieciągłe (dwupołożeniowe, trójpołożeniowe) tworzą nieliniowe układy regulacji. Od układów liniowych odróżniają je następujące cechy:
w układach nieliniowych nie obowiązuje zasada superpozycji;
charakter odpowiedzi w układach nieliniowych zależy od wartości amplitudy wymuszenia, a częstotliwość odpowiedzi w stanie ustalonym nie jest równa częstotliwości wymuszenia (w sygnale odpowiedzi elementu nieliniowego mogą wystąpić składowe o częstotliwościach niższych lub wyższych niż częstotliwość sygnału wymuszonego);
stabilność układów nieliniowych zależy od warunków początkowych, tzn. że układ może być stabilny dla małych wartości warunków początkowych, a niestabilny dla dużych wartości warunków początkowych.
Regulacja dwupołożeniowa jest stosowana dla obiektów mających duże stałe czasowe, np.: układy regulacji ciśnienia, poziomu, temperatury.
Do grupy regulatorów nieciągłych należą proste regulatory trójpołożeniowe (przekaźniki trójpołożeniowe) generujące trzy stany (-H, L, +H), które mogą odpowiadać obrotom silnika nawrotnego w lewo, zatrzymaniu i w prawo. Elementy trójpołożeniowe (trójstawne) objęte pętlą ujemnego sprzężenia zwrotnego i sterujące silnikami wykonawczymi nazywają się regulatorami krokowymi.
Regulatory dwupołożeniowe (dwustawne)
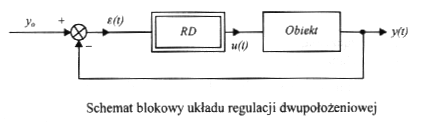
W charakterze regulatora dwustawnego RD występuje element mający charakterystykę przekaźnikową (przekaźnik, stycznik, tyrystor, itp.).
Jest ona nieliniowa i nieciągła.
Regulatory dwupołożeniowe mogą być stosowane zarówno do obiektów statycznych (wieloinercyjnych), jak i astatycznych (całkujących) z opóźnieniem. Stosuje się je do regulacji temperatury (np. w podgrzewaczach paliwa), poziomu cieczy (np. w zbiornikach rozchodowych), ciśnienia (np. w zbiornikach sprężonego powietrza). Regulatory te są nazywane odpowiednio termostatami, mobrejami i presostatami. Sygnał regulatora dwustawnego przyjmuje dwa stany zwane umownie L (niski) i H (wysoki).
Regulatory trójpołożeniowe (trójstawne)
Regulatory trójpołożeniowe są zbudowane analogicznie jak dwupołożeniowe i mogą spełniać podobne funkcje np. sterować mocą cieplną.
Charakterystyka statyczna regulatora trójstawnego ma trzy stany: -H, L, +H.
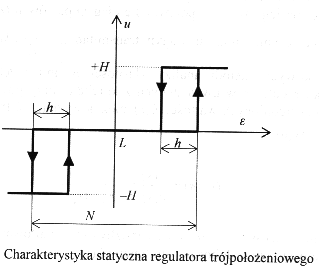
W porównaniu z regulatorami dwustawnymi dodatkowym parametrem charakterystyki statycznej (oprócz strefy histerezy h) jest strefa nieczułości N.
Zastosowanie regulatora trójpołożeniowego w postaci tylko elementu trójpołożeniowego, mającego trzy stany, bez dodatkowych członów dynamicznych, nie daje dobrych rezultatów. Istotne znaczenie regulatorów trójpołożeniowych wynika z możliwości sterowania silnikami nawrotnymi: trzy stany na wyjściu elementu trójstawnego odpowiadają kierunkowi obrotów w prawo, w lewo oraz spoczynkowi. Regulator trójpołożeniowy zintegrowany z silnikiem wykonawczym i zaopatrzony w korekcję własności dynamicznych nazywa się regulatorem krokowym.
Regulatory krokowe
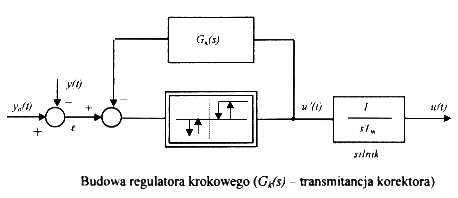
Na skutek istnienia ujemnego sprzężenia zwrotnego Gk(s) wokół elementu trójstawnego na jego wyjściu pojawia się ciąg impulsów u'(t), sterujący silnikiem wykonawczym, reprezentowanym transmitancją
. W przypadku regulatorów krokowych, metody analizy własności dynamicznych są podobne jak w przypadku regulatorów dwustawnych z korekcją. Przy powolnych zmianach ε(t) oraz dla uśrednionych wartości
(t) można wyznaczyć transmitancję regulatora krokowego:
GR(s) =
Z zależności tej wynika, że istnieje możliwość kształtowania dynamiki regulatora krokowego przez dobór transmitancji Gk(s).
Dla Gk(s) =
regulator ma własności PI:
GR(s) =
a dla Gk(s) =
, czyli gdy w pętli sprzężenia zwrotnego występuje element dwuinercyjny, regulator krokowy ma własności PID:
GR(s) =
W podanych zależnościach Tm. Oznacza czas przestawienia organu nastawczego z jednego krańcowego położenia w drugie i charakteryzuje prędkość serwomotoru. Stała Tm. Powinna być tak dobrana, aby utrzymać ruch impulsowy przy nadążaniu za zmianami yo lub przy kompensowaniu zakłóceń.
Nastawy regulatorów krokowych PI i PID są prawie że takie same jak regulatorów o wyjściu ciągłym. Ponadto dobierane są jeszcze dwa parametry: szerokość pętli histerezy h i strefy nieczułości N. Dobór tych parametrów określają następujące przesłanki:
ponieważ maksymalna wartość błędu statycznego jest równa szerokości strefy nieczułości N, więc N dobiera się z uwagi na dokładność statyczną;
wzrost strefy histerezy pogarsza stabilność układu, zwykle przyjmuje się h/N<0,5;
ciąg impulsów u' podany na wejście silnika
powoduje, że sygnał nie ma charakteru ciągłego, ale krokowy, co może powodować oscylacje, gdy długość najkrótszego kroku Δu jest zbyt duża;częstotliwość przełączenia silnika wykonawczego decyduje o szybkości jego zużycia.
Regulatory „rozmyte” (nieostre)
Regulatory rozmyte bazują na tzw. teorii zbiorów rozmytych, która zajmuje się nieprecyzyjnymi, słabo określonymi pojęciami i wielkościami, ale stwarza ona możliwość operowania nimi w ściśle matematycznym sensie.
Powodzenie tej teorii wynika z tego, że wiele spotykanych w rzeczywistości obiektów ma nieprecyzyjnie zdefiniowane kryteria przynależności. Takie niedokładnie określone zbiory nazywają się zbiorami rozmytymi, mają ciągłą funkcję przynależności i odgrywają ważną rolę w działalności człowieka. Na podstawie tej teorii konstruowane są regulatory rozmyte. Uzasadnieniem dla budowy regulatorów rozmytych jest to, że konwencjonalne metody właściwego doboru regulatora wymagają określenia dynamiki procesu technologicznego, która jest nieznana albo silnie nieliniowa, co znacznie utrudnia dobór regulatora i jego nastaw. W wielu przypadkach reguły sterowania mają charakter werbalny, których treść wynika z wieloletniego doświadczenia nabytego przez człowieka sterującego danym urządzeniem.
Strukturę regulatora rozmytego przedstawia rysunek.
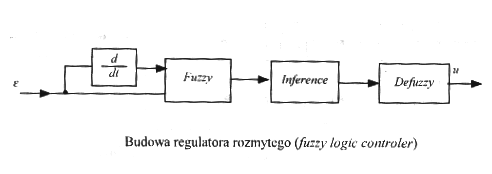
W strukturze regulatora rozmytego wyróżnia się trzy moduły:
FUZZY (fuzzyfikacja, rozmywanie) moduł dokonujący transformacji zmiennych wejściowych (błędu, pochodnej błędu lub /i całki błędu) na zbiory rozmyte.
INFERENCE (interferencja, wnioskowanie) moduł wnioskujący (na podstawie określonych reguł wnioskowania) o tym, jaki będzie sterujący sygnał rozmyty.
DEFUZZY (defuzzyfikacja, ostrzenie) moduł dokonujący przetwarzania sterującego sygnału rozmytego na deterministyczną wartość numeryczną, możliwą do zrealizowania fizycznie i do ustawienia przez człon nastawczy.
Działanie regulatora na etapie fuzzy polega na tym, że określa się przedziały zmienności sygnałów wejściowych wprowadzanych do regulatora (np. prędkość, kąt nachylenia, itp.). Na tej podstawie, na etapie wnioskowania (inference) określone zostają zbiory rozmyte, do których mogą należeć sygnały wejściowe regulatora np. małe wartości prędkości i kąta nachylenia mogą być zaliczone albo do przedziału zmian (zbioru) ujemnych (dodatnich) małych wartości albo do zmian w okolicach zera. O tym, do którego ze zbiorów będą należały sygnały o tych przedziałach zmian, decyduje tzw. funkcja przynależności, konstruowana specjalnie dla danego przypadku. Na etapie trzecim (defuzzy) wyznacza się deterministyczną wartość liczbową wykorzystywaną do sterowania danym procesem.
Rozmyte regulatory PID
Ze względu na to, że podstawowe regulatory nieostre są regulatorami statycznymi, dynamikę uzyskuje się poprzez podłączenie na ich wejście pochodnej lub całki błędu.
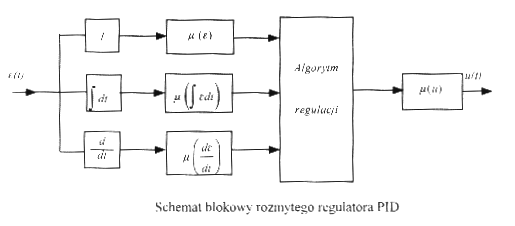
Błąd regulacji po scałkowaniu i zróżniczkowaniu podlega rozmywaniu, a wagi poszczególnych udziałów są określone przez ich funkcje przynależności μ. Algorytm regulacji wyznacza wartość funkcji przynależności sygnału u na podstawie trzech zależności: błędu, całki, pochodnej błędu.
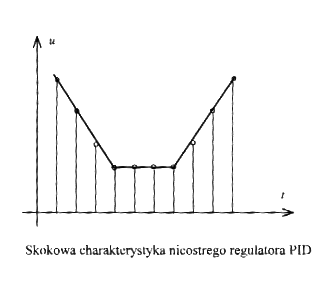
W bloku μ(u) dokonywana jest defuzzyfikacja sygnału błędu wygląd charakterystyki skokowej regulatora ilustruje rysunek.
Regulatory ekstremalne
Niektóre obiekty mają charakterystyki ekstremalne, tzn. istnieje taka wartość wielkości wejściowej, dla której wielkość wejściowa osiąga ekstremum (minimum, maksimum). Typowym przykładem jest silnik - śruba nastawna, a także spalanie, w którym maksymalną temperaturę uzyskuje się tylko przy ściśle określonym stosunku powietrza do paliwa.
Zadanie odszukania i utrzymania ekstremum spoczywa na regulatorze ekstremalnym.
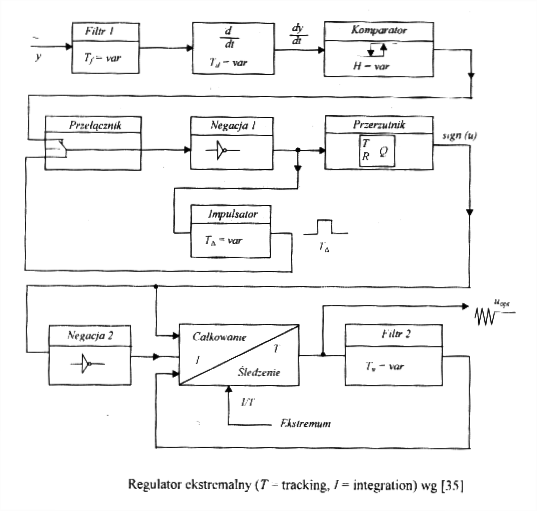
Funkcje poszczególnych bloków:
filtr 1 i blok różniczkujący
służą do wyznaczania pochodnej sygnału y tłumiąc jednocześnie zakłócenia wysokoczęstotliwościowe. Pochodna dodatnia świadczy o zbliżaniu się do ekstremum, a ujemna o oddalaniu się od ekstremum;komparator przyporządkowuje znakowi pochodnej
wartość Hi lub Lo, szerokość strefy histerezy komparatora zależy od prędkości v;przerzutnik typu T zmienia kierunek sterowania na przeciwny, wtedy gdy wejście komparatora ma wartość Lo, co świadczy o oddalaniu się od wierzchołka;
przełącznik, negacja 1 i impulsator blokują przerzutnik na czas TΔ po każdej zmianie sterowania;
negacja 2 i blok całkowanie / śledzenie powodują narastanie lub zmniejszanie sygnału wyjściowego z prędkością v =
(Ti - czas całkowania). Blok całkowanie / śledzenie pracuje w trybie całkowania lub śledzenia w zależności od wartości na wejściu I/T. Jeżeli I/T = Lo odpowiada to całkowania, czyli gdy ekstremum = Hi. Dla ekstremum = Lo na wyjście jest podawana stała wartość uopt;filtr 2 usuwa składową trójkątną a pozostawia tylko wartość średnią uopt. Stała czasowa Tu powinna być dostatecznie duża. Po ustaleniu się sygnału na wyjściu filtru 2, przeszukiwanie powinno być przerwane (ekstremum = Lo). Blok całkowanie / śledzenie przechodzi do stanu śledzenia utrzymując uopt na wyjściu.
Regulatory cyfrowe
Regulatory cyfrowe mogą być wykonane jako niezależne regulatory aparatowe lub też w postaci systemów sterowania cyfrowego, pracujących w czasie rzeczywistym, realizowanych za pomocą komputerów.
Sterowanie w czasie rzeczywistym to tryb pracy systemu komputerowego, w którym programy przetwarzające dane przychodzące z zewnątrz są permanentnie gotowe, tzn. rezultaty ich przetwarzania są dostępne po ściśle określonym czasie. Z podanej definicji wynika, że główną cechą systemu czasu rzeczywistego jest konieczność komunikacji ze sterowanym obiektem.
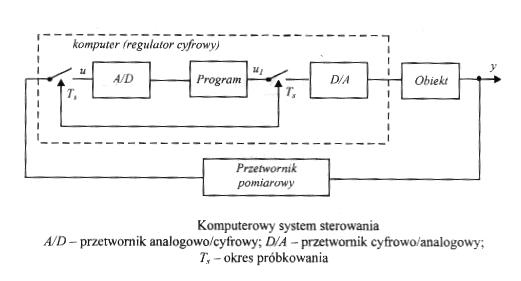
Komunikacja odbywa się za pomocą przetworników D/A i A/D. Zadaniem przetwornika analogowo - cyfrowego jest przetworzenie sygnału analogowego z przetwornika pomiarowego na sygnał cyfrowy. Parametrem charakterystycznym przetwornika A/D jest liczba bitów n, która jest miarą dokładności przetwarzania. Przykładowo, jeżeli zastosuje się przetwornik 10 lub 12 bitowy, to w systemie dziesiętnym odpowiada to reprezentacji sygnału równej 3 - 4 pozycji znaczących.
Regulatory wielofunkcyjne
Regulatory wielofunkcyjne są to regulatory, które mogą prowadzić równocześnie regulację ciągłą, sterowanie logiczno - sekwencyjne oraz równocześnie pomocnicze obliczenia. Schemat funkcjonalny pokazano na rysunku.
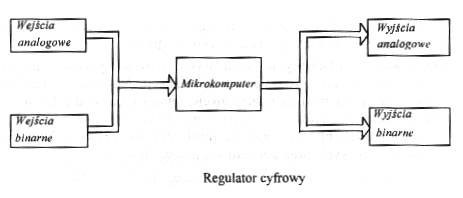
Wejścia analogowe są przyłączony do przetworników pomiarowych, termometrów oporowych, termoelementów itp. Wejścia binarne wykorzystywane są do przyłączania przekaźników, czujników stykowych, wyłączników krańcowych. Wyjścia analogowe sterują siłownikami (elektrycznymi, pneumatycznymi, hydraulicznymi), a wyjścia binarne za pośrednictwem przekaźników i styczników włączają zawory, grzejniki, silniki, itp.
Regulatory okrętowe
Wyszukiwarka
Podobne podstrony:
Elektrotechnika okrętowa, Elektrotechnika - Gnat2 dł, Systemy stosowane na statkach: Przepisy mówią
2 WŁAŚCIWOŚCI LEKÓW I RODZAJE REAKCJI ORGANIZMU NA ICH DZIAŁANIE
GRUPA CZASOWNIKÓW REGULARNYCH ZAKOŃCZONYCH NA AR
8788 regulacja kotlow na paliwa stale zapotrzebowanie powietrza
Argumenty na rzecz regulacji opartych na Driscoll Hoskins
regulamin konkursu na wiersz i piosenkę ,,Kubusiowi
ORZ Czynniki niebezpieczne wg ich rodzaju i poziomu występujące na poszczególnych stanowiskach pracy
Rodzaje pulapek lesnych na owady ppt
Techniki stosowane na zajęciach plastycznych
Materialy stosowane na rurki sk Nieznany
Załącznik nr 2 do Regulaminu konkursu na projekt koszulki kierunków Collegium Medicum UMK, Koszulki
rodzaje regulacji 1
7.1.1 Rodzaje regulator
or Wpływ stosowania?nzodiazepin na ryzyko złamania szyjki kości udowej u osób w podeszłym wieku
Terminy stosowane na kolei
Funkcje Kursu walutowego rodzaje czynniki wplywajace na poziom kursu itp
REGULAMIN zachowania na przerwach, pomoce dydaktyczne, różności
1. Systemy kanalizacji stosowane na obszarach wiejskich, Kanalizacja
więcej podobnych podstron