Manipulator 1:
|
|
|
|
|
0 |
400 |
0 |
|
0 |
400 |
0 |
Manipulator 2:
Manipulator 3:
Manipulator 4:
|
Өi |
di |
ai |
αi |
1 |
Ө0v |
d1 |
0 |
0 |
2 |
Ө1v - 90° |
0 |
d2 |
-90° |
3 |
Ө2 |
0 |
0 |
-90° |
4 |
0 |
a3v |
0 |
0 |
5 |
Ө4v |
d4 |
0 |
0 |
6 |
Ө5v |
a5 |
0 |
-90° |
7 |
180° |
0 |
d6 |
0 |
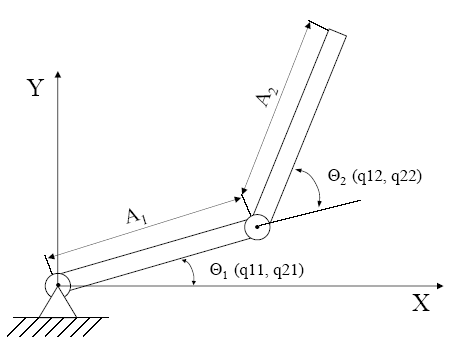
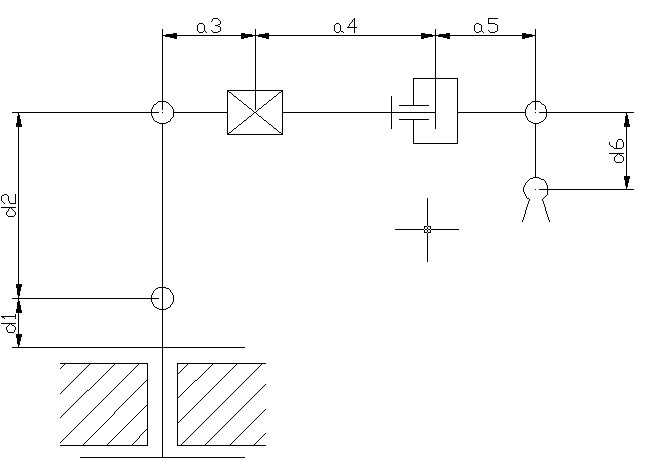
Sketch of robot:
Manipulator 5:
![]()
Wyszukiwarka
Podobne podstrony:
projekt robotyka chwytaki
prezentacja projekt 1 roboty ziemne część 3 (2)
prezentacja projekt 1 roboty ziemne część 2 (2)
prezentacja projekt 1 roboty ziemne część 4 (2)
Projekt robotyka, PKM4
prezentacja projekt 1 roboty ziemne część 1 (2)
Projekt robotyka(2), PKM4
projekt robotyka chwytaki
Trwają prace nad projektem ustawy o koncesjach na roboty budowlane lub usługi
Robotyka laborki projekt
Projekt manipulatora, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty, A PROJEKT MANIPULA
projekt dla rudego, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Projekt
Projekt pkm2, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty, Projekty - multum ciulstwa
interpolacja projekt, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
więcej podobnych podstron