Spis treści
1. Wprowadzenie
2. Zadanie projektowe
3. Obliczenie ruchliwości
4. Analiza zadania projektowego
5. Wyznaczenie charakterystyki przesunięciowej chwytaka
6. Wyznaczenie charakterystyki prędkościowej chwytaka
7. Wyznaczenie charakterystyki siłowej chwytaka
8. Sprawdzenie metodą mocy chwilowych charakterystyki siłowej chwytaka
9. Obliczenie wytrzymałości chwytaka przy maksymalnych obciążeniach
10. Obliczenie wymaganych parametrów napędu
11. Opracowanie sensoryki
12. Zaprojektowanie chwytaka
13. Rysunki złożeniowe i wykonawcze chwytaka
14. Składanie i rozkładanie chwytaka (avi)
15. Animacja pracy chwytaka (avi)
WSTĘP
1. WPROWADZENIE.
Chwytaki są tą częścią robota, która bezpośrednio współpracuje z manipulowanym przedmiotem, od której w istotny sposób zależy dokładność manipulacyjna, która nie może być wykonywana przez producenta jako część uniwersalna do wszystkich , ani do wielu zastosowań.
Chwytak jest niezbędnym wyposażeniem jednostki kinematycznej maszyny manipulacyjnej wykonującej w procesie produkcyjnym zadanie transportowe. Często zdarza się że użytkownik musi sam zaprojektować i wykonać chwytak do swoich mniej typowych zastosowań.
Naszym zadaniem jest zaprojektowanie chwytaka dla robota przemysłowego.
2. ZADANIE PROJEKTOWE:
Zaprojektować chwytak do manipulatora przemysłowego wg zadanego schematu kinematycznego spełniający następujące wymagania:
w procesie transportu urządzenie chwytające ma za zadanie pobrać (uchwycić) obiekt w położeniu początkowym, trzymać go w trakcie trwania czynności transportowych i uwolnić go w miejscu docelowym,
obiektem transportu są wałki i tuleje o średnicy d=80 mm, długości l=20÷100 mm z mosiądzu lub stali,
manipulator zasilany jest sprężonym powietrzem o ciśnieniu nominalnym
pn=0,6 MPa
2.1 ZAKRES PROJEKTU
Obliczenie ruchliwości chwytaka na podstawie zadanego schematu kinematycznego.
Analiza zadania projektowego, ustalenie listy wymagań oraz przyjęcie modelu obliczeniowego chwytaka.
a) wyznaczanie skoku siłownika, wymiarów elementów chwytaka, zakresu szczęk
chwytaka oraz wymiarów i ciężaru obiektu manipulacji
b) wyznaczenie maksymalnej koniecznej siły chwytu Fch max i obliczenie wymiarów szczęki,
3. Wyznaczenie charakterystyki przesunięciowej chwytaka ![]()
4. Wyznaczenie charakterystyki prędkościowej chwytaka ![]()
5. Wyznaczenie charakterystyki siłowej ![]()
6. Sprawdzenie metodą mocy chwilowych charakterystyki siłowej chwytaka na podstawie jego charakterystyki prędkościowej ![]()
dla jednego zadanego położenia i porównanie wyników.
7. Obliczenia wytrzymałościowe chwytaka przy maksymalnych obciążeniach:
a) sprawdzenie warunku wytrzymałościowego na zginanie ramion chwytaka
b) sprawdzenie warunku wytrzymałościowego na ścinanie dla najbardziej obciążonego sworznia.
8. Obliczenie wymaganych parametrów napędu pneumatycznego chwytaka i jego dobór.
9. Wykonanie rysunku złożeniowego chwytaka oraz rysunków wykonawczych zadanych części.
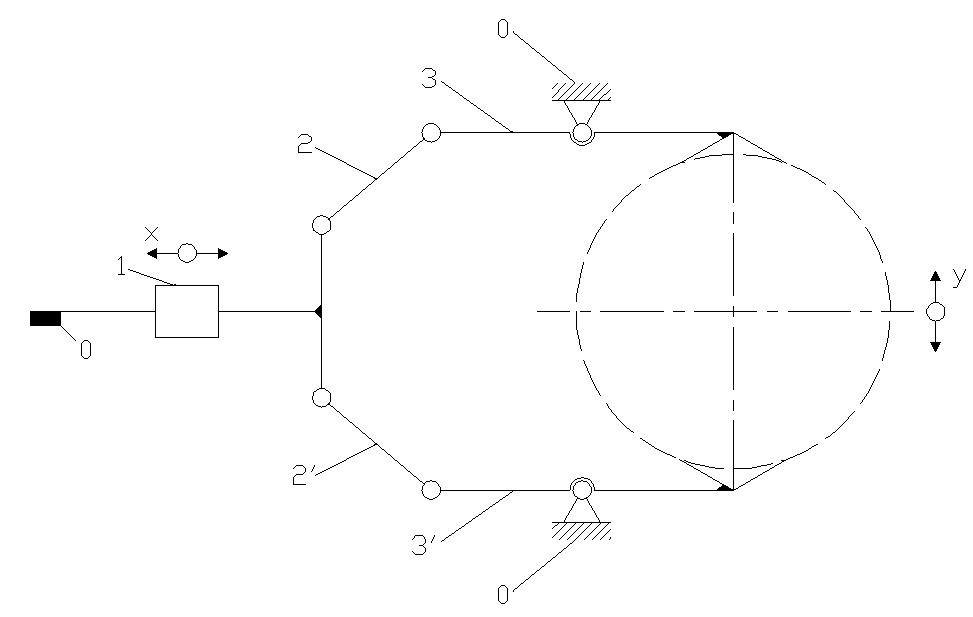
2.2 Zadany schemat kinematyczny chwytaka typu P-(O-O-O)
Rys.1 Schemat kinematyczny chwytaka.
3. OBLICZENIE RUCHLIWOŚCI CHWYTAKA
![]()
Gdzie:
w- ruchliwość
n-liczba członów ruchomych,
p5-liczba par kinematycznych klasy piątej obrotowych i postępowych,
p4-liczba par klasy czwartej.
Dla powyższego schematu chwytaka mamy:
n=5;
p5=(0,1);(1,2);(2,3);(1,2');(2',3');(0,3);(0,3');
![]()
Ruchliwość w=1 oznacza, ze do napędu chwytaka zastosujemy jeden siłownik pneumatyczny o ruchu liniowym.
4. ANALIZA ZADANIA PROJEKTOWEGO
Przyjęcie podstawowych wymiarów elementów chwytaka, wyznaczenie skoku siłownika oraz zakresu rozwarcia szczęk.
Rys. 2 Geometria chwytaka
Ostatecznie na podstawie analizy geometrycznej na podstawie schematu dalszych obliczeń przyjęto:
![]()
Przesuniecie suwaka

Wyznaczanie maksymalnej siły chwytu Fch max i minimalnego wymiaru szczęki.
Dane:
dmax - maksymalna średnica obiektu manipulacji.
Qmax - maksymalny ciężar obiektu manipulacji.
![]()
-współczynnik tarcia miedzy szczekami chwytaka a obiektem.
n=2 współczynnik przeciążenia chwytaka 2γ-kąt nachylenia szczek chwytaka.
2γ - kąt nachylenia szczęk chwytaka.
Transportowany obiekt chwytany jest w pozycji jak na Rys.3.
Rys.3. Układ sił działających na chwytak
a) rozkład sił tarcia podczas chwytania obiektu
b) rozkład sił normalnych podczas chwytania obiektu
Materiał szczęk: stal 45 (ciężar właściwy γ=78500 [N/m3])
Materiał wałka: mosiądz (ciężar właściwy γ=85000 [N/m3])
Maksymalny ciężar obiektu transportowanego:
![]()
Wyznaczenie maksymalnej koniecznej siły chwytu:
Dla prawidłowego uchwycenia transportowanego elementu musi być spełniony warunek:
stąd siła chwytu oraz
![]()
Wyznaczenie minimalnego wymiaru szczęki:
stąd oraz
Aby zapewnić wystarczający margines błędu zakładamy że e =30[mm]
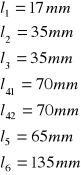
5. Wyznaczenie charakterystyki przesunięciowej chwytaka y =fp(x)
Rys. Model obliczeniowy chwytaka do wyznaczenia charakterystyki przesunięciowej
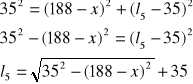
Przyjmujemy wymiary:
L0 =135 mm
L1 = 17 mm
L2 = 35 mm
L3 = 35 mm
L4.1 = 70 mm
L4.2 = 70 mm
Po zrzutowaniu na osie:
X: ![]()
Y: ![]()
![]()
![]()
![]()
Otrzymane równania podnosimy do kwadratu i dodajemy stronami, mamy:
Z twierdzenia Talesa mamy
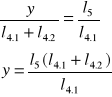
Ostatecznie:
![]()
Podstawy Robotyki Projekt techniczny chwytaka
Opracowali: K. Balawender, P. Jasielski
![]()
![]()
![]()
![]()
![]()
![]()
Wyszukiwarka
Podobne podstrony:
Projekt robotyka(2), PKM4
projekt robotyka chwytaki
prezentacja projekt 1 roboty ziemne część 3 (2)
prezentacja projekt 1 roboty ziemne część 2 (2)
prezentacja projekt 1 roboty ziemne część 4 (2)
prezentacja projekt 1 roboty ziemne część 1 (2)
projekt robotyka1
projekt robotyka chwytaki
Trwają prace nad projektem ustawy o koncesjach na roboty budowlane lub usługi
Robotyka laborki projekt
Projekt manipulatora, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty, A PROJEKT MANIPULA
projekt dla rudego, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Projekt
Projekt pkm2, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty, Projekty - multum ciulstwa
interpolacja projekt, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
więcej podobnych podstron