? 25.Podaj jaka jest minimalna ilość fotopunktów do wyznaczenia:
-elementów orientacji zewnętrznej kamery(fotogrametrycznego wcięcia wstecz) na podstawie jednego zdjęcia : 6 parametrów - 2 punkty
-współczynników przekształcenia rzutowego płaszczyzny na płaszczyznę : 8 parametrów - 3 punkty
-współczynników równania DLT: 11 parametrów- 4 punkty
26. Udowodnij, że do obliczenia współrzędnych XYZ punktu potrzebne jest , aby był on sfotografowany na dwóch zdjęciach o znanej orientacji.
Szukane: X, Y, Z
Dane:x0,y0, ck
W jaki sposób można uzyskać przestrzenne współrzędne punktu w terenowym
układzie odniesienia na podstawie zdjęcia fotogrametrycznego? Zgodnie z zasadą
rzutowania, wektor promienia rzutującego w przestrzeni obrazowej kamery jest
kolinearny (współliniowy) z wektorem w przestrzeni przedmiotowej. Współrzędne
pierwszego wektora są wyznaczane przez elementy orientacji wewnętrznej kamery
oraz położenie punktu obrazu w układzie tłowym, natomiast pozycję drugiego określa
się w zewnętrznym układzie odniesienia (rys. 5). Kolinearność tę można zapisać w
postaci prostej zależności:
Sprowadzając obydwa wektory do tego samego układu, mamy:
(3) i (4)
gdzie:
- A jest ortogonalną macierzą transformacji przez kolejne obroty o kąty orientacji: ω,
φ, κ przestrzennego układu tłowego zdjęcia w stosunku do układu odniesienia XYZ,
- X0, Y0, Z0 to współrzędne środka rzutów w układzie odniesienia.
(Wielkości: X0, Y0, Z0, ω, φ, κ nazywamy elementami orientacji zewnętrznej zdjęcia)
Rys. 5. Kolinearność wektorów w przestrzeni obrazowej i w przestrzeni
przedmiotowej
Równanie kolinearności jest podstawą do rozwiązania większości problemów
związanych ze znalezieniem przestrzennego położenia punktów. Pozwala ono
również na wyznaczenie elementów orientacji zewnętrznej zdjęcia, co wymaga
jednak znajomości współrzędnych tłowych i terenowych przynajmniej trzech punktów
(tzw. fotopunktów).
Promień rzutujący odtworzony na podstawie zdjęcia fotogrametrycznego (rzutu
środkowego) to zbyt mało, aby znaleźć położenie punktu w przestrzeni. Zależność
(3) przy znanej orientacji zdjęcia daje tylko trzy równania z czterema niewiadomymi:
X, Y, Z, λ. Dwa rzuty z dwóch różnych punktów umożliwiają natomiast wykonanie
fotogrametrycznego wcięcia w przód (rys. 6), ponieważ kolinearność dwu promieni
rzutujących daje 6 równań z pięcioma niewiadomymi: X, Y, Z punktu i współczynniki
skali λ΄ i λ”.
Rys. 6. Wyznaczenie położenia punktu na podstawie dwóch zdjęć
Z rys. 6 wynika, że wektor łączący oba środki rzutów (wektor bazy) oraz wektory
rzutowe do punktu A są współpłaszczyznowe, czyli komplanarne. Warunek ten jest
spełniony, gdy iloczyn mieszany tych wektorów jest równy zeru.
27. Wymień główne zastosowania równania kolinearności w fotogrametrii.
Zastosowanie równania kolinearności:
1. Obliczenie orientacji zewnętrznej zdjęcia: X0, Y0, Z0, ω,φ,κ
(fotogrametryczne wcięcie wstecz) (ang. Space Resection)
2. Wyznaczenie przestrzennych współrzędnych X, Y, Z punktu
pomierzonego na co najmniej dwu zdjęciach (fotogrametryczne wcięcie
w przód) (ang. Space Intersection)
3. Wyznaczenie elementów orientacji wewnętrznej kamery wraz z
parametrami funkcji aproksymującej błędy obrazu: kalibracja kamery
(Camera Calibration)
4. Wyznaczenie współrzędnych tłowych x, y przy znajomości orientacji
zdjęcia i współrzędnych przestrzennych rzutowanego punktu
(rzutowanie punktu na zdjęcie)
5. Wyrównanie sieci zdjęć metodą wiązki
a) przy znajomości kalibracji kamery: X0, Y0, Z0, ω,φ,κ, X, Y, Z (Bundle
Adjustment) lub
b) bez tej znajomości z samokalibracją: X0, Y0, Z0, ω,φ,κ, X, Y, Z, x0, y0,
ck, parametry funkcji modelującej błędy obrazu (Self-calibration)
28.Co to jest zdjęcie ekwiwalentne? Podaj sposób jego wykorzystania do wyznaczenia współrzędnych XYZ punktu ze zdjęć lotniczych.
Zdjęcie ekwiwalentne - zastępcze, przetworzone (analitycznie bądź komputerowo) na zdjęcie, które ma ten sam środek rzutów, ale inne kąty.
można przeliczyć na zdjęcie o innym Ck
wykorzystywane w metodzie uproszczonej stereogramu 2 zdjęć o osiach dokładnie równoległych i wykorzystuje się do wcięcia w przód.
29.Udowodnij, że na dokładność opracowania stereo fotogrametrycznego wpływa rodzaj stożka obiektywu kamery.
Rodzaj stożka wpływa na stosunek bazowy k=CK/b , gdyż dla standardowych zdjęć formatu 23x23 b= 40%*l = 92 mm, czyli jest stały a zmieniamy CK, które może być różne. Natomiast od stosunku bazowego uzależniony jest później błąd . Czyli żeby dokładnie wyznaczyć rzędna Z bo to ona jest obarczona największym błędem , trzeba brać kamery nadszerokokątne.
30.Jaką częścią wysokości lotu jest błąd określenia wysokości Z przyjmując : format zdjęcia L=23cm, pokrycie podłużne 60%, dokładności pomiaru na zdjęciach mp =mxy = 10μm.
Dane :
L=230mm
b=40%*L=92mm
mp=mxy=0,010 mm
mw=mz=W/b*mp(x,y)=0,011%W
31.Do czego służy FMC?
Służy do kompensacji ruchu, likwiduje rozmazanie obrazu na zdjęciu spowodowane ruchem samolotu.
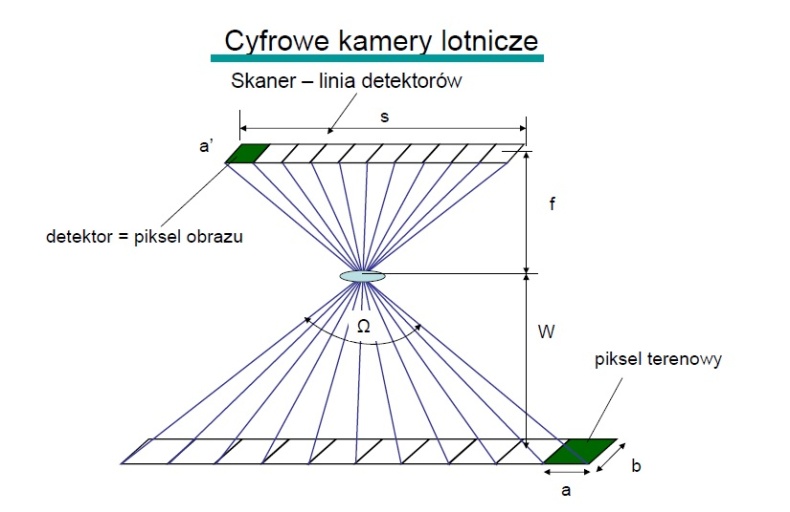
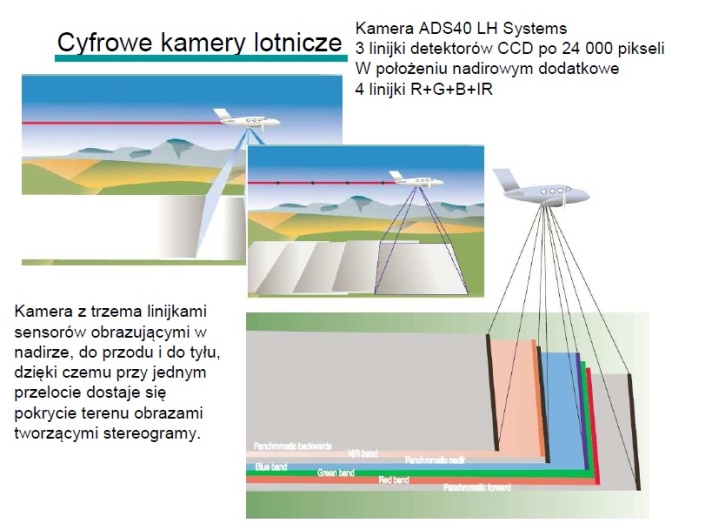
32.Jakie są dwa główne rozwiązania konstrukcyjne lotniczych kamer cyfrowych?
1.Oparta na koncepcji skanera elektrooptycznego - system optyczny obrazuje na linijkach CCD do przodu, w nadirze i wstecz
2.Kamery modułowe - kilka obiektywów rejestrujących dla obrazów panchromatycznych inny fragment terenu na matrycach CCD. Obrazy są łączone w oprogramowaniu kamery w rzut środkowy.
Ad1.
Kamera z linijkami sensorów dzięki zastosowaniu systemu DGPS/INS ma określoną orientację każdego położenia linijki. W rzucie środkowym jest przedstawiony tylko obraz w pojedynczych liniach, zestawienie linii tworzy rzut środkowo-ortogonalny.
Poniżej przedstawiono obrazy czterech symetrycznie rozmieszczonych budynków o jednakowej wysokości
na rys. a) z centralnej linijki detektorów,
na rys. b) ze skrajnej linijki detektorów
a) b)
Ad2. Kamery modułowe
Wyszukiwarka
Podobne podstrony:
fotka zadania na koloII-reczuch, Geodezja, Fotogrametria, Egzamin
sprawko fotka nr3
fotka sprawko
fotka VSD (1)
fotka
Fotka 2
sprawko, gik, semestr 4, Fotka, Fotka
fotka sprawko 7
sprawko fotka nr6
fotka
dephos, gik, semestr 5, FOTKA, fotkaa, Sprawozdanie 2
fotka, ĆWICZENIE 5, ĆWICZENIE 5-6: WSTEPNE PRZETWARZANIE OBRAZU CYFROWEGO
fotka sciaga
Fotka kolo
fotka V semestr dr Preuss sciagi
fotka egzamin 14
sciaga fotka
Fotka sprawozdanie 5
Pod nogi, gik, semestr 4, Fotka, zaliczenie
więcej podobnych podstron