Ruch swobodny i nieswobodny ciał
Ruch swobodny
Przez ruch swobodny rozumiemy ruch, w którym, oprócz grawitacji, nie działają na ciało żadne inne siły.
Wektorowe równanie różniczkowe ruchu punktu materialnego w ruchu swobodnym:
Równania ruchu to układ trzech
równań różniczkowych drugiego rzędu.
Rozwiązaniem układu różniczkowego jest równanie parametryczne toru ruchu.
Rozwiązanie tego układu zależy od sześciu stałych dowolnych
Aby ruch badanego ciała był całkowicie znany trzeba wyznaczyć wartości tych sześciu stałych na podstawie sześciu warunków początkowych:
Zasada przyczynowości mechaniki klasycznej: znajomość stanu początkowego ruchu ciała pozwala jednoznacznie określić stan jego ruchu w chwilach wcześniejszych i późniejszych.
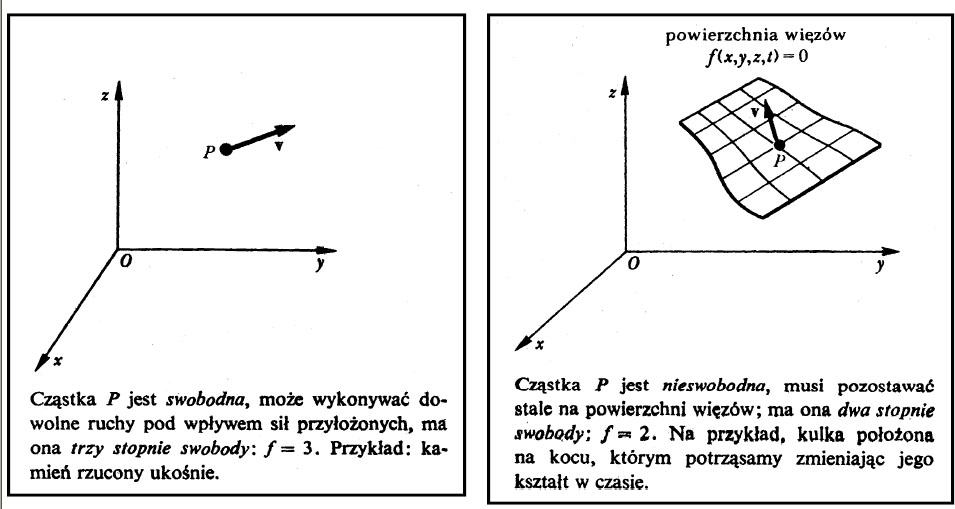
Ruch nieswobodny
Rodzaje więzów
więzy holonomiczne
To takie, które można opisać prostymi równaniami różniczkowymi.
więzy nieholonomiczne
To takie, których nie da się opisać pojedynczymi równaniami różniczkowymi.
więzy skleronomiczne
zależą one jawnie od czasu
więzy reonomiczne
nie zależą jawnie od czasu - np. więzy zależące od prędkości lub energii kinetycznej
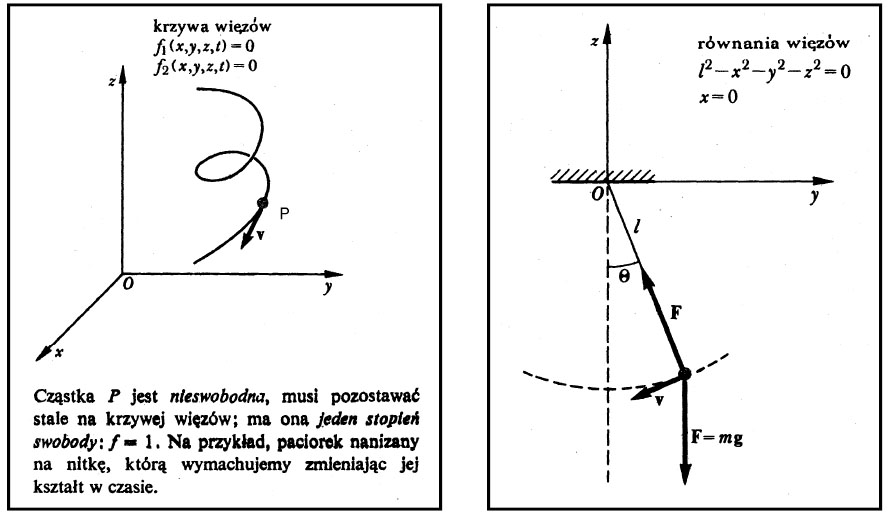
Liczba stopni swobody ciała: f = 3 - k, gdzie k jest liczbą równań opisujących więzy.
Ze względu na istnienie więzów wprowadzamy do równań ruchu poza siłami zewnętrznymi F(r, v, t) dodatkową siłęreakcji FR (reakcja więzów):
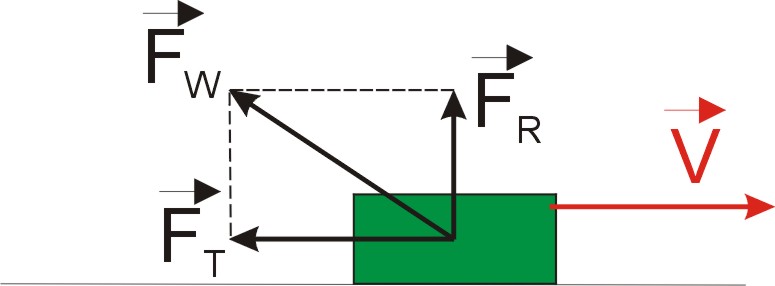
Reakcja więzów jest zwykle prostopadła do powierzchni lub krzywej więzów (więzy idealne); siła tarcia FT, styczna do więzów, jest siłą zewnętrzną
Ruch po powierzchni Ruch po krzywej
Wyszukiwarka
Podobne podstrony:
8.Swobodne spadanie ciał, Fizyka - Lekcje
W4 Ruch harmoniczny dyn pktu nieswobodnego
W4 Ruch harmoniczny dyn pktu nieswobodnego(1)
Fizyka, Fizyka - Ruchy, PRĘDKOŚĆ:wielkość opisująca ruch ciał,miara szybkości przemieszczania się
7 Ruch ciał ze zmienną masą
26. Ruch ciał w polu grawitacyjnym, Fizyka - Lekcje
3 2 Procesy mechaniczne i hydromechaniczne Ruch cial stałych w płynach
W4 Ruch harmoniczny dyn pktu nieswobodnego
SWOBODA PRZEPŁYWU UE
Odpornosc swoista i nieswoista
prezentacja Ruch konsumencki
6 swoboda osób
Swoiste i nieswoiste zapalenie kości i stawów
Swobodny przepływ kapitału w UE
Wykł 05 Ruch drgający
więcej podobnych podstron