Spis treŇõci.
Strona :
Streszczenie.
Wykaz stosowanych oznaczeŇĄ.
Wstńôp.
WiadomoŇõci o ukŇāadach wykorzystanych w pracy.
Wzmacniacze operacyjne.
Bramki cyfrowe.
Przerzutniki.
Liczniki.
Rejestry.
WiadomoŇõci wstńôpne o fali akustycznej.
Koncepcje rozwińÖzania.
Cyfrowy miernik przesunińôcia fazowego.
Fazomierz cyfrowy.
Realizacja rozwińÖzania.
Od pomysŇāu do ukŇāadu .
Pomiar cyfrowy.
UkŇāad elektroniczny.
Badania laboratoryjne
Oscylogramy.
Wyznaczanie szybkoŇõci ukŇāad√≥w .
Wyznaczanie czasu propagacji przerzutnika.
Wyznaczanie wńôzŇā√≥w i strzaŇāek w fali akustycznej.
Wnioski.
Dodatek.
Dane techniczne miernika.
Schematy montaŇľowe.
PŇāytki drukowane .
Schemat ideowy caŇāoŇõci .
Wykaz elementów .
Widok pŇāyty czoŇāowej.
Literatura.
Kosztorys.
1.Streszczenie
Celem naszej pracy dyplomowej byŇāo zaplanowanie i wykonanie cyfrowego miernika fazy. Wykonany przez nas miernik jest przeznaczony do pomiaru przesunińôcia fazowego pomińôdzy dwoma sygnaŇāami maŇāej czńôstotliwoŇõci z dokŇāadnoŇõcińÖ do jednego stopnia. Za pomocńÖ tego miernika moŇľna r√≥wnieŇľ wyznaczyńá wńôzŇāy i strzaŇāki w fali akustycznej, stosujńÖc do tego doŇõńá prosty ukŇāad.
Zbudowany przez nas miernik przebadaliŇõmy ponadto w pracowni elektronicznej pod kńÖtem jego parametr√≥w oraz sporzńÖdziliŇõmy dokumentacjńô technicznńÖ zawierajńÖcńÖ opisy budowy, schematy i zasadńô dziaŇāania poszczeg√≥lnych blok√≥w. Dokumentacja techniczna zawiera ponadto przebiegi sygnaŇā√≥w po przejŇõciu przez poszczeg√≥lne bloki miernika.
2.Wykaz stosowanych oznaczeŇĄ.
R - rezystancja
u1 - przebieg napińôcia odniesienia
u2 - przebieg napińôcia w fazie
ő®1 - faza poczńÖtkowa przebiegu napińôcia odniesienia
ő®2 - faza przebiegu napińôcia przesunińôtego w fazie
ő§ - okres
t - czas
fN - czńôstotliwoŇõńá generatora wzorcowego
UWE - napińôcie sygnaŇāu wejŇõciowego doprowadzonego do
wejŇõcia miernika
fWE - czńôstotliwoŇõńá sygnaŇāu doprowadzonego do wejŇõcia
miernika
f - czńôstotliwoŇõńá drgaŇĄ
n1 - wskazania licznika przy pierwszym kroku
n2 - wskazania licznika przy drugim kroku
IŇöR - wartoŇõńá Ňõrednia prńÖdu
U - napińôcie na diodzie
q - Ňāadunek elektronu
k - staŇāa Boltzmana
T¬į - temperatura bezwzglńôdna w Kelwinach
IS - prńÖd nasycenia
i - wartoŇõńá chwilowa prńÖdu
e1 - wejŇõciowy sygnaŇā odniesienia
e2 - wyjŇõciowy sygnaŇā odniesienia
E1 - wartoŇõńá skuteczna wejŇõciowego syg. odniesienia
E2 - wartoŇõńá skuteczna wyjŇõciowego syg. odniesienia
CLK - wejŇõcie zegarowe
RST - wejŇõcie zerujńÖce
Q0...Q14 - wyjŇõcia ukŇāad√≥w
K,S,J - wejŇõcia przerzutnika
S0...S3 - wejŇõcie pamińôci poŇõredniej
a...g - wyjŇõcia sterujńÖce wyŇõwietlaczami
A...D - wejŇõcia ukŇāadu przetwarzajńÖcego kod BCD na
kod 7 - segmentowy
A1...A4 - wejŇõcia ukŇāadu przetwarzajńÖcego kod szeregowy
na kod BCD
R0...R3 - wejŇõcia pamińôci
őĽ - dŇāugoŇõńá fali
- ciŇõnienie akustyczne
őô - natńôŇľenie dŇļwińôku
MMV - multiwibrator monostabilny
f0 - czńôstotliwoŇõńá odniesienia
Hz - jednostka czńôstotliwoŇõci [ herc]
c - prńôdkoŇõńá dŇļwińôku
PA - moc akustyczna
S - powierzchnia
IŇöR - wartoŇõńá Ňõrednia prńÖdu
3.Wstńôp
a) WiadomoŇõci og√≥lne o przesunińôciu fazowym.
W kaŇľdym ukŇāadzie elektronicznym zawierajńÖcym kondensator lub cewkńô wystńôpujńÖ zaleŇľnie od czńôstotliwoŇõci przesunińôcia fazowe. W zaleŇľnoŇõci od przeznaczenia ukŇāadu przesunińôcia takie mogńÖ byńá poŇľńÖdane lub niepoŇľńÖdane, nieodŇāńÖczne lub pasoŇľytnicze, waŇľne lub nieistotne.
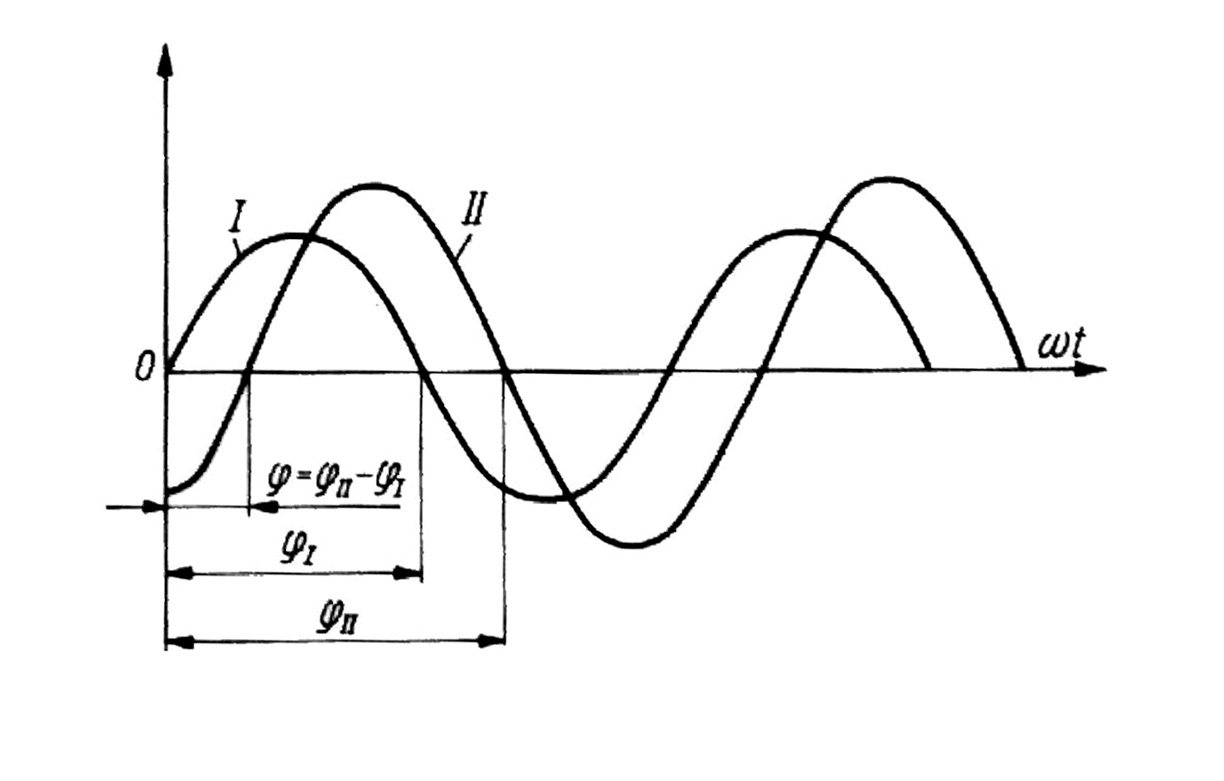
Przesunińôciem fazowym przebieg√≥w sinusoidalnych nazywamy r√≥Ňľnicńô faz poczńÖtkowych dw√≥ch przebieg√≥w o tej samej czńôstotliwoŇõci.
b) Pomiary przesunińôcia fazowego.
W przeciwieŇĄstwie do napińôcia, prńÖdu lub mocy, kt√≥re mogńÖ byńá Ňāatwo mierzone w spos√≥b bezpoŇõredni przez pomiar pojedynczego sygnaŇāu, pomiar przesunińôcia fazy obejmuje nieuchronnie por√≥wnywanie dw√≥ch sygnaŇā√≥w. M√≥wienie o fazie sygnaŇāu bez odniesienia do innego sygnaŇāu nie ma uzasadnienia. Zatem typowy ukŇāad do pomiaru fazy powinien zawierańá co najmniej zespoŇāy przedstawione na rysunku.
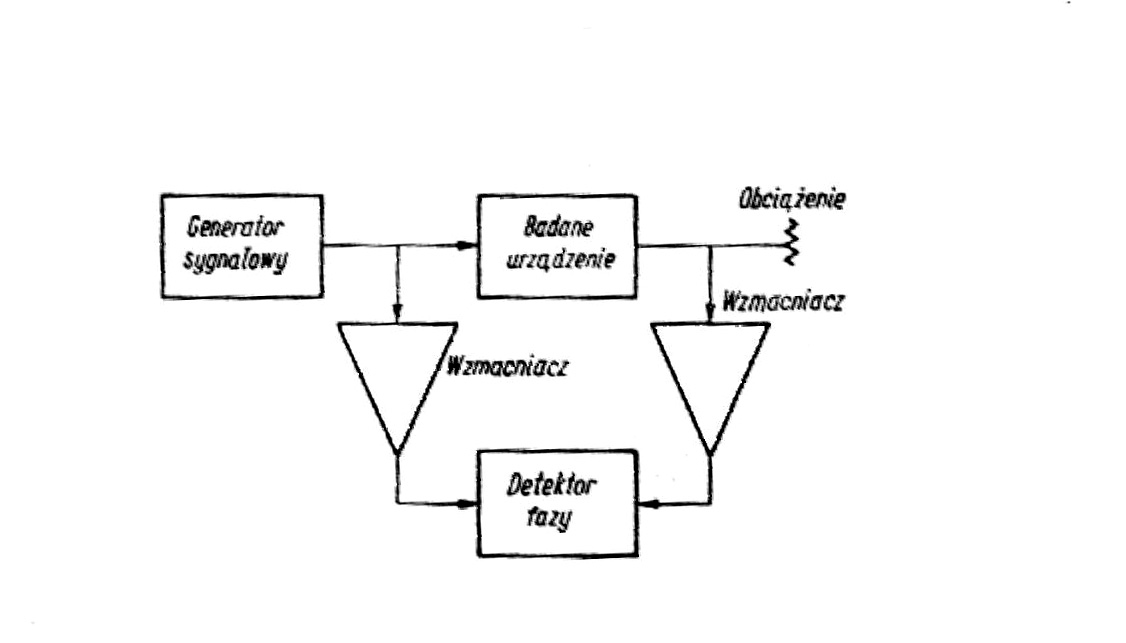
SygnaŇāy z wejŇõcia i wyjŇõcia badanego urzńÖdzenia sńÖ sprawdzane przez wzmacniacze mostkowe lub w inny spos√≥b, kt√≥ry nie zmienia tych sygnaŇā√≥w. Tak otrzymane dwie sinusoidy sńÖ nastńôpnie por√≥wnywane w pewnego rodzaju detektorze lub komparatorze fazy.
Por√≥wnywanie fazy z dokŇāadnoŇõcińÖ okoŇāo ¬Ī1¬į moŇľe byńá dokonywane za pomocńÖ oscyloskopu z identycznymi kanaŇāami X i Y. SygnaŇā odniesienia jest zazwyczaj doŇāńÖczony do kanaŇāu X, a sygnaŇā przesunińôty w fazie-do kanaŇāu Y. Zatem
x=sinŌČt
y=sin(ŌČt + Ōē)
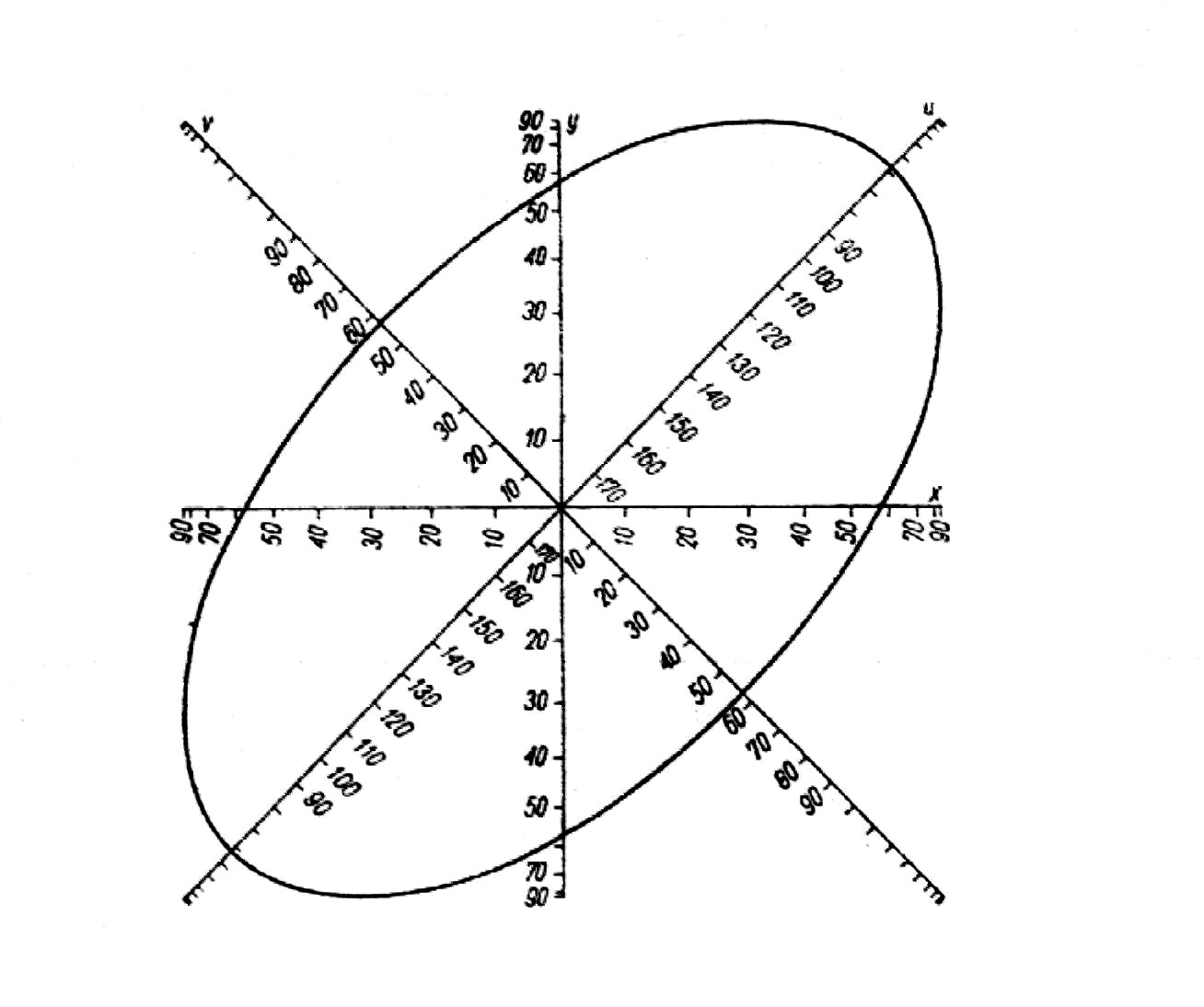
JeŇľeli Ōē=0, na ekranie oscyloskopu uzyskamy prostńÖ o nachyleniu 45 ¬į. Dobrym sposobem sprawdzenia kanaŇā√≥w przed wykonaniem pomiaru jest doprowadzenie tego samego sygnaŇāu do obu kanaŇā√≥w jednoczeŇõnie i wyregulowanie wzmocnieŇĄ(oraz-jeŇľeli konieczne-przesunińôcie fazy w jednym z kanaŇā√≥w) tak, aby uzyskańá linińô prostńÖ nachylonńÖ pod kńÖtem 45¬į. Po odŇāńÖczeniu jednego sygnaŇāu powinno wystńÖpińá odchylenie mińôdzyszczytowe wynoszńÖce 10 dziaŇāek w kierunku sygnaŇāu pozostawionego. Po doprowadzeniu dw√≥ch sygnaŇā√≥w faza moŇľe byńá oszacowana na podstawie odcink√≥w wyznaczonych na osi y lub x przez otrzymanńÖ elipsńô. Gdy x=0, to y=sinŌē,a gdy y=0,to x=sin(-Ōē); tak wińôc wszystkie odcinki powinny byńá r√≥wne, a faza wynosi ¬Īarc siny lub arc sinx. Gdy Ōē‚Čą(2n-1)90¬į, to odcinki na osi x i y stajńÖ sińô niewraŇľliwe na maŇāe zmiany fazy Ōē i dokŇāadnoŇõńá pomiaru zmniejsza sińô.
LepszńÖ metodńÖ jest pomiar mniejszej osi elipsy. Dla IŌēI< 90¬į oŇõ ta leŇľy na prostej nachylonej pod kńÖtem -45¬į, jak pokazano na rysunku, natomiast dla IŌēI> 90¬į mniejsza oŇõ elipsy bńôdzie przebiegaŇāa wzdŇāuŇľ linii nachylonej pod kńÖtem +45¬į.
JeŇľeli przyjmiemy szczytowe odchylenie x i y za r√≥wne jednoŇõci, to Ňāatwo moŇľna pokazańá, Ňľe odcinki na liniach nachylonych pod kńÖtami -45¬į i +45¬į sńÖ r√≥wne odpowiednio
u=‚ąö2 sin Ōē/2
v=‚ąö2 cos Ōē/2
MoŇľna zatem skonstruowańá skalńô do odczytu mniejszej osi elipsy w spos√≥b pokazany na rysunku. Elipsa zawsze przecina te linie pod kńÖtem prostym, co usuwa jedno ze Ňļr√≥deŇā bŇāńôdu odczytu ze wzglńôdu na fakt, Ňľe mniejsza oŇõ elipsy jest czuŇāńÖ funkcjńÖ fazy Ōē dla wszystkich wartoŇõci Ōē.
InnńÖ metodńÖ pomiaru przesunińôcia fazy za pomocńÖ oscyloskopu jest metoda zewnńôtrznej synchronizacji odchylania za pomocńÖ sygnaŇāu odniesienia. Przy obserwacji sygnaŇāu odniesienia na osi y w tym samym czasie poziom i nachylenie sygnaŇāu sterujńÖcego mogńÖ byńá nastawiane w celu wymuszenia rozpoczńôcia wyŇõwietlania dodatnich poŇā√≥wek sygnaŇāu w poczńÖtku ukŇāadu lub na jednym koŇĄcu osi poziomej. Pr√≥cz tego moŇľna wyregulowańá szybkoŇõńá odchylania w celu uzyskania przebiegu poŇāowy okresu, odpowiadajńÖcego dziewińôciu podstawowym dziaŇākom. Gdy sygnaŇā o przesunińôtej fazie zostanie nastńôpnie doprowadzony do wzmacniacza osi y, dodatnie poŇā√≥wki sygnaŇāu na osi x bńôdńÖ wykazywaŇāy przesunińôcie fazy w jednostkach 20¬į na dziaŇākńô. NaleŇľy zwr√≥cińá uwagńô na poŇāoŇľenie sygnaŇāu pionowego, tak aby dodatnie i ujemne wartoŇõci szczytowe odchylenia byŇāy r√≥wne . Zaletami tej metody jest to, Ňľe skala przesunińôcia fazy jest liniowa oraz Ňľe nie wystńôpuje niejednoznacznoŇõńá zwińÖzana z wartoŇõcińÖ przesunińôcia fazy.
Stosowanie oscyloskop√≥w do pomiar√≥w fazy nie zapewnia duŇľej szybkoŇõci ani dokŇāadnoŇõci pomiaru, ale charakteryzuje sińô tńÖ wielkńÖ zaletńÖ, Ňľe nie wymaga stosowania aparatury specjalistycznej. JeŇľeli zachodzi potrzeba wykonania duŇľej liczby pomiar√≥w lub wymagana jest duŇľa dokŇāadnoŇõńá wynik√≥w, powinno sińô stosowańá inne metody o wińôkszej efektywnej dokŇāadnoŇõci, szybszym odczycie oraz wińôkszej odpornoŇõci na szum i znieksztaŇācenia przebiegu.
InnńÖ metodńÖ pomiaru przesunińôcia fazowego jest pomiar polegajńÖcy na zastosowaniu czasomierza cyfrowego do pomiaru czasu. Cyfrowe mierniki umoŇľliwiajńÖ szybki pomiar przesunińôcia fazowego z bipolem dyskretyzacji ¬Ī1 , co dla wielu pomiar√≥w jest zupeŇānie wystarczajńÖce . Cyfrowy pomiar przesunińôcia fazowego stosuje sińô coraz czńôŇõciej w r√≥Ňľnego rodzaju automatach pomiarowo-kontrolnych, uŇľywanych do kontroli produkcji metodńÖ por√≥wnania wielkoŇõci mierzonej a wzorcowńÖ w ukŇāadach r√≥Ňľnicowych. StosujńÖc fazomierze zamiast czńôstotliwoŇõciomierzy lub woltomierzy uzyskuje sińô bardzo dobrńÖ rozdzielczoŇõńá urzńÖdzenia pomiarowego, przy duŇľej odpornoŇõci na zakŇā√≥cenia zewnńôtrzne. Do grupy czńôŇõciej uŇľywanych fazomierzy z odczytem analogowym naleŇľy tzw. fazomierz impulsowy. Fazomierze impulsowe pracujńÖ w zakresie czńôstotliwoŇõci akustycznych i nadakustycznych przy amplitudzie napińôńá wejŇõciowych od miliwolt√≥w do kilku wolt√≥w i dokŇāadnoŇõci pomiaru 2√∑3%.
C) Detektory fazy.
Najbardziej powszechnńÖ postacińÖ detektora fazy jest diodowy modulator koŇāowy (pierŇõcieniowy) lub detektor synchroniczny, przedstawiony na rysunku.
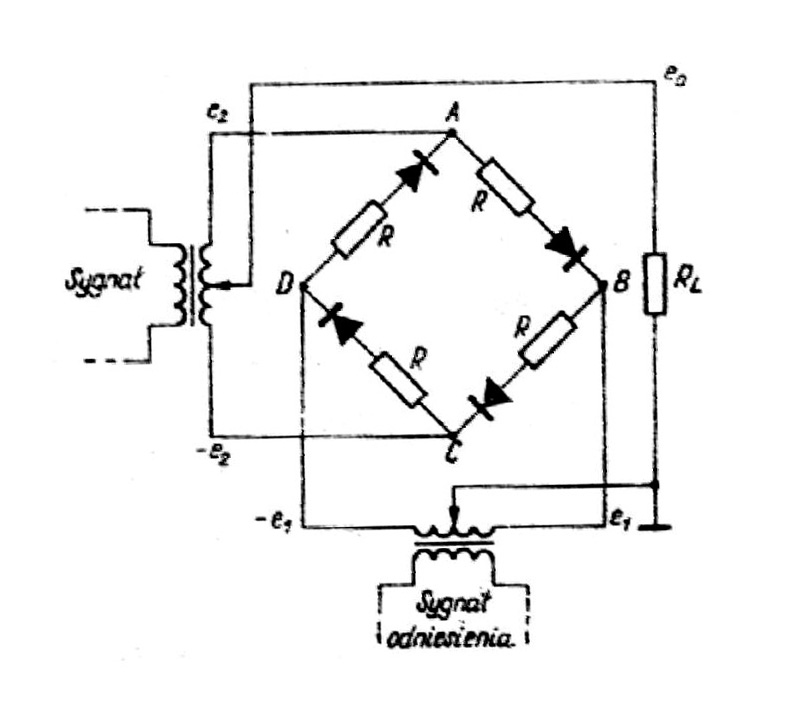
Istnieje wiele sposob√≥w dziaŇāania tego urzńÖdzenia w zaleŇľnoŇõci od poziomu i ksztaŇātu sygnaŇāu wejŇõciowego oraz impedancji Ňļr√≥dŇāa i obcińÖŇľenia. JeŇľeli diody sńÖ idealnymi przyrzńÖdami p√≥Ňāprzewodnikowymi, takimi Ňľe ich prńÖd moŇľna przedstawińá za pomocńÖ r√≥wnania
i = Is [ exp(qU/kT) - 1 ]
i jeŇľeli R=0, to przy doŇāńÖczeniu maŇāych sygnaŇā√≥w moŇľna w prosty spos√≥b obliczyńá prńÖd zwarcia na wyjŇõciu przy rezystancji obcińÖŇľenia r√≥wnej zero. Napińôcia doprowadzone do diod detektora fazy sńÖ okreŇõlone przez sygnaŇā wejŇõciowy.
Diodowy modulator koŇāowy moŇľe byńá r√≥wnieŇľ stosowany w przypadku sygnaŇā√≥w o wysokich poziomach po wŇāńÖczeniu rezystor√≥w obcińÖŇľajńÖcych R , kt√≥rych rezystancja powinna byńá znacznie wińôksza od rezystancji diod. JeŇľeli fala noŇõna sygnaŇāu odniesienia jest bardzo duŇľa w por√≥wnaniu z sygnaŇāem wejŇõciowym lub jest ona falńÖ prostokńÖtnńÖ o amplitudzie tylko nieznacznie wińôkszej od wartoŇõci szczytowej amplitudy sygnaŇāu wejŇõciowego, modulator dziaŇāa jak synchroniczny przeŇāńÖcznik rewersyjny.
MoŇľna opracowańá innych rodzaj√≥w detektor√≥w fazy. Jeden z czńôŇõciej stosowanych typ√≥w generuje dwa cińÖgi impuls√≥w, reprezentujńÖcych na przykŇāad narastajńÖce odcinki dw√≥ch sygnaŇā√≥w. CińÖg impuls√≥w jednego sygnaŇāu ustawia przerzutnik w stan „1”, a impulsy cińÖgu odniesienia sprowadzajńÖ przerzutnik do stanu „0”. Wsp√≥Ňāczynnik wypeŇānienia sygnaŇāu na wyjŇõciu przerzutnika jest wińôc wprost proporcjonalny do przesunińôcia fazowego. Zalety tego typu detektora wynikajńÖ z liniowoŇõci skali, moŇľe byńá on jednak podatny na zakŇā√≥cenia szumowe w przypadku, gdy mierzone przesunińôcie fazy jest bliskie 0¬į (lub360¬į); ponadto drŇľenie fazy (jitter) jednego lub obu cińÖg√≥w impuls√≥w przeŇāńÖcza w spos√≥b losowy cykl pracy przerzutnika, co moŇľe powodowańá bŇāńôdny odczyt wyniku pomiaru.
Detektory fazy sńÖ zwykle stosowane jako wskaŇļniki zera do wykazywania, Ňľe dwa sygnaŇāy majńÖ na przykŇāad przesunińôcie fazy wynoszńÖce dokŇāadnie 90¬į.DokŇāadny odczyt rzeczywistej fazy jest w takim przypadku wykonywany ze skali kalibrowanego przesuwnika fazowego, umieszczonego w kanale odniesienia (lub badanego sygnaŇāu) w celu ustawienia przesunińôcia r√≥wnego 90¬į. JeŇľeli jest to potrzebne, sygnaŇā z wyjŇõcia takiego detektora fazy moŇľe byńá uŇľywany do sterowania przesuwnika fazowego, umoŇľliwiajńÖc automatyczne zachowanie stanu r√≥wnowagi.
Opracowano wiele r√≥Ňľnych rodzaj√≥w przesuwnik√≥w fazowych, umoŇľliwiajńÖcych uzyskiwanie przesunińôcia fazy aŇľ do 180¬į lub 360¬į, a nawet cińÖgŇāe przesuwanie fazy w nieograniczonym zakresie. Jednak prawie wszystkie te przesuwniki, z wyŇāńÖczeniem obrotowych przesuwnik√≥w mikrofalowych, sńÖ urzńÖdzeniami jednoczńôstotliwoŇõciowymi lub bardzo wńÖskopasmowymi. Zar√≥wno z tego powodu, jak i dlatego, Ňľe same detektory fazy dziaŇāajńÖ bardzo dokŇāadnie przy jednej czńôstotliwoŇõci, stosuje sińô zwykle w praktyce przemianńô czńôstotliwoŇõciowńÖ sygnaŇāu(kt√≥rego faza ma byńá por√≥wnywana) do jednej czńôstotliwoŇõci poŇõredniej, na kt√≥rej wykonuje sińô wszystkie pomiary. Zatem mierniki wzmocnienia i fazy sńÖ wyposaŇľone tradycyjnie w dwukanaŇāowy odbiornik superheterodynowy, zawierajńÖcy stabilne liniowe mieszacze i wzmacniacze czńôstotliwoŇõci poŇõredniej, a czńôsto i ukŇāad synchronizacji generatora lokalnego w celu uzyskania dw√≥ch czńôstotliwoŇõci poŇõrednich, kt√≥rych amplitudy sńÖ proporcjonalne do sygnaŇā√≥w wejŇõciowych i kt√≥rych stosunek faz jest taki sam jak w sygnaŇāach wejŇõciowych.
Jednym z typ√≥w miernika fazy jest woltomierz wektorowy(wektrometr). W wektrometrze stosuje sińô dwa pr√≥bniki (dwie sondy) do badania dw√≥ch sygnaŇā√≥w, kt√≥rych amplitudy i wzglńôdne fazy maja byńá mierzone. Impulsy pr√≥bkujńÖce majńÖ czńôstotliwoŇõńá pr√≥bkowania przesunińôtńÖ wzglńôdem czńôstotliwoŇõci sygnaŇāu o staŇāńÖ czńôstotliwoŇõńá fo, przy czym zazwyczaj fo<< f. W ten spos√≥b generowane sńÖ dwa sygnaŇāy o jednakowej czńôstotliwoŇõci fo, kt√≥rych amplitudy i fazy sńÖ takie same jak sygnaŇāu oryginalnego o czńôstotliwoŇõci f. Pr√≥bniki mogńÖ byńá faktycznie traktowane jako bardzo szerokopasmowe mieszacze o wzmocnieniu jednostkowym. Przesunińôta czńôstotliwoŇõńá pr√≥bkowania moŇľe byńá uzyskana przez wykorzystanie sygnaŇāu wyjŇõciowego z dyskryminatora umieszczonego w kanale odniesienia, kt√≥ry do dyskryminatora jest doŇāńÖczony do sygnaŇāu pr√≥bkowanego, lub z detektora fazy, doŇāńÖczonego do tego samego sygnaŇāu i generatora lokalnego o ustalonej czńôstotliwoŇõci fo, stosowanego do regulowania czńôstotliwoŇõci przestrajanego napińôciowo generatora, z kt√≥rego otrzymywane sńÖ impulsy pr√≥bkujńÖce.
Wektorometry sńÖ typowymi urzńÖdzeniami szerokopasmowymi, pokrywajńÖcymi zakres czńôstotliwoŇõci w stosunku 1000 do 1 i majńÖcymi wejŇõcia przystosowane do odbioru sygnaŇā√≥w o napińôciu od kilku mikrowolt√≥w do okoŇāo 1V, bez stosowania tlumik√≥w wejŇõciowych. PozwalajńÖ one na pomiar napińôńá w zakresie ponad 70 - 80 dB oraz umoŇľliwiajńÖ pomiar fazy z dokŇāadnoŇõcińÖ okoŇāo 1¬į. Dzińôki istnieniu wŇāaŇõciwoŇõci samo synchronizacji strojenie generatora lokalnego moŇľe byńá automatyczne w kaŇľdym zakresie czńôstotliwoŇõci. Jak z tego wynika, wektorometry sńÖ istotnie tak Ňāatwe w obsŇāudze jak proste woltomierze elektroniczne. Wprowadzenie wektorometr√≥w znacznie uproŇõciŇāo laboratoryjne pomiary fazy w zakresie czńôstotliwoŇõci od 1 do 1000 MHz
4. WiadomoŇõci o ukŇāadach wykorzystanych w pracy.
Wzmacniacze operacyjne.
Pierwowzorem wzmacniacza operacyjnego jest klasyczny wzmacniacz r√≥Ňľnicowy z dwoma wejŇõciami i pojedyŇĄczym wyjŇõciem.
Rzeczywiste wzmacniacze operacyjne majńÖ bardzo duŇľe wzmocnienie napińôciowe sygnaŇāu r√≥Ňľnicowego, bardzo duŇľńÖ wartoŇõńá impedancji wejŇõciowej oraz bardzo maŇāńÖ impedancjńô wyjŇõciowńÖ (w otwartej pńôtli). MogńÖ dostarczańá napińôcie wyjŇõciowe o amplitudzie zbliŇľonej do wartoŇõci napińôńá zasilajńÖcych (zazwyczaj uŇľywa sińô symetrycznych napińôńá zasilajńÖcych, najczńôŇõciej o wartoŇõciach ¬Ī15V). WejŇõcia (+) i (-) funkcjonujńÖ tak, jak moŇľna by sińô spodziewańá: na wyjŇõciu pojawia sińô napińôcie dodatnie, jeŇõli potencjaŇā wejŇõcia nieodwracajńÖcego (+) jest wińôkszy od potencjaŇāu wejŇõcia odwracajńÖcego (-) i odwrotnie. Symbole (+) i (-) nie oznaczajńÖ koniecznoŇõci doprowadzenia do jednego wejŇõcia np. dodatniego wzglńôdem drugiego wejŇõcia lub teŇľ czegoŇõ podobnego. InformujńÖ one jedynie o fazie sygnaŇāu wyjŇõciowego wzglńôdem danego sygnaŇāu wejŇõciowego (ma to istotne znaczenie gdy chcemy, aby sprzńôŇľenie zwrotne w zaprojektowanym ukŇāadzie byŇāo sprzńôŇľeniem ujemnym).Stosowanie termin√≥w „odwracajńÖce” i „nieodwracajńÖce” zamiast „minus” i „plus” pozwala uniknńÖńá nieporozumieŇĄ. Na graficznym symbolu wzmacniacza operacyjnego bardzo czńôsto nie oznacza sińô wyprowadzeŇĄ napińôńá zasilajńÖcych. Zar√≥wno we wzmacniaczu operacyjnym jak i jego symbolu nie istnieje wyprowadzenie masy. Wzmacniacze operacyjne majńÖ olbrzymie wzmocnienie napińôciowe i prawie nigdy nie uŇľywa sińô ich bez sprzńôŇľenia zwrotnego. Ich wzmocnienie w otwartej pńôtli jest tak duŇľe Ňľe dla kaŇľdej rozsńÖdnej wartoŇõci wzmocnienia ukŇāadu z zamknińôtńÖ pńôtlńÖ sprzńôŇľenia zwrotnego parametry tego ukŇāadu zaleŇľńÖ jedynie od parametr√≥w obwodu sprzńôŇľenia zwrotnego.
Idealny wzmacniacz operacyjny ma nastńôpujńÖce wŇāaŇõciwoŇõci:
NieskoŇĄczenie duŇľńÖ impedancjńô wejŇõciowńÖ (zar√≥wno r√≥ŇľnicowńÖ jak i wsp√≥lnńÖ )
ZerowńÖ wartoŇõńá impedancji wyjŇõciowej (w otwartej pńôtli ).
NieskoŇĄczenie duŇľńÖ wartoŇõńá wzmocnienia napińôciowego sygnaŇāu r√≥Ňľnicowego.
ZerowńÖ wartoŇõńá wzmocnienia napińôciowego sygnaŇāu wsp√≥lnego.
WartoŇõńá napińôcia wyjŇõciowego r√≥wnńÖ zeru, gdy potencjaŇāy obu wejŇõńá sńÖ jednakowe (zerowa wartoŇõńá napińôcia niezr√≥wnowaŇľenia ).
NieskoŇĄczenie duŇľńÖ prńôdkoŇõńá narastania napińôcia wyjŇõciowego (napińôcie wyjŇõciowe moŇľe zmieniańá sińô momentalnie ).
Wszystkie wymienione parametry sńÖ niezaleŇľne od zmian zar√≥wno temperatury jak i wartoŇõci napińôńá zasilajńÖcych. JednakŇľe parametry rzeczywistych wzmacniaczy operacyjnych r√≥ŇľnińÖ sińô w pewnym stopniu od parametr√≥w wzmacniacza idealnego.
Bramki cyfrowe.
Poprzez ukŇāady cyfrowe rozumiemy ukŇāady, w kt√≥rych w kaŇľdej chwili wystńôpujńÖ tylko dwa moŇľliwe stany, np. tranzystor jako element ukŇāadu cyfrowego, moŇľe byńá albo w stanie nasycenia, albo w stanie nieprzewodzenia. Z moŇľliwoŇõci opisu stan√≥w jako poziom√≥w napińôcia lub poziom√≥w prńÖdu zwykle wybiera sińô to pierwsze rozwińÖzanie. M√≥wi sińô wtedy o poziomie napińôcia odpowiadajńÖcym stanowi wysokiemu, oznaczonemu symbolem H , oraz o poziomie napińôcia odpowiadajńÖcym stanowi niskiemu, oznaczonemu symbolem L . Te dwa stany mogńÖ reprezentowańá wiele r√≥Ňľnych „bit√≥w” (cyfr dw√≥jkowych) informacji.
W dziedzinie ukŇāad√≥w cyfrowych dopuszcza sińô, aby stanowi wysokiemu i niskiemu odpowiadaŇāy zakresy wartoŇõci napińôcia, a nie pojedyŇĄcze poziomy napińôńá. Np. dla wszystkich ukŇāad√≥w CMOS (seria HC), napińôcia wejŇõciowe o wartoŇõciach mińôdzy 0V a 1,5V sńÖ interpretowane jako stan niski, natomiast napińôcia o wartoŇõciach mińôdzy 3,5V a 5V , gdzie +5V jest wartoŇõcińÖ napińôcia zasilania - jako stan wysoki . Stany: niski i wysoki na wyjŇõciach ukŇāad√≥w CMOS sńÖ reprezentowane odpowiednio przez zakresy napińôńá 0V do kilku dziesińôtnych wolta oraz od wartoŇõci napińôcia zasilania do wartoŇõci tego napińôcia pomniejszonego o kilka dziesińôtnych wolta. Takie okreŇõlenie stan√≥w logicznych uwzglńôdnia rozrzuty produkcyjne, wraŇľliwoŇõńá ukŇāad√≥w na temperaturńô, obcińÖŇľenie, napińôcia zasilania itp. oraz obecnoŇõńá „szum√≥w”, tj. Rozmaitych Ňõmieci nakŇāadajńÖcych sińô na sygnaŇā podczas jego wńôdr√≥wki przez ukŇāad. UkŇāad otrzymujńÖcy sygnaŇā decyduje, czy reprezentuje on stan wysoki czy niski i odpowiednio reaguje. Dop√≥ki szum nie zamienia jedynki na zero lub odwrotnie, wszystko jest w porzńÖdku. Jakiekolwiek zakŇā√≥cenie jest eliminowane w kaŇľdym stopniu ukŇāadu, poniewaŇľ odtwarzane sńÖ „czyste” sygnaŇāy 0 i 1. W tym sensie ukŇāady cyfrowe sńÖ bezzakŇā√≥ceniowe i doskonaŇāe. Warto r√≥wnieŇľ pamińôtańá , Ňľe r√≥Ňľne rodziny element√≥w cyfrowych majńÖ r√≥ŇľnńÖ odpornoŇõńá na zakŇā√≥cenia .UkŇāady CMOS majńÖ wińôkszńÖ odpornoŇõńá na zakŇā√≥cenia napińôciowe ni z ukŇāady TTL , podczas gdy szybkie ukŇāady z rodziny ECL - odpowiednio mniejszńÖ . IstotńÖ techniki cyfrowej jest wytwarzanie cyfrowych sygnaŇā√≥w wyjŇõciowych jako odpowiedzi na cyfrowe sygnaŇāy wejŇõciowe . Innym typowym zadaniem ukŇāad√≥w cyfrowych jest pobranie pewnych liczb binarnych i ich wyŇõwietlanie wydrukowanie lub wydziurkowanie jako znak√≥w dziesińôtnych. We wszystkich wymienionych zadaniach sygnaŇāy ( stany ) wejŇõciowe sńÖ zdeterminowanymi funkcjami sygnaŇā√≥w ( stan√≥w ) wejŇõciowych. Zalicza sińô je do zadaŇĄ „kombinacyjnych `'. Wszystkie mogńÖ byńá wykonane za pomocńÖ urzńÖdzeŇĄ zwanych bramkami, kt√≥re realizujńÖ dziaŇāania algebry Boole'a w dziedzinie ukŇāad√≥w dwustanowych ( binarnych ).
BRAMKA AND
wejŇõcia |
wyjŇõcia |
0 0 |
0 |
0 1 |
0 |
1 0 |
0 |
1 1 |
1 |
WyjŇõcie bramki AND jest w stanie wysokim tylko wtedy , gdy oba wejŇõcia sńÖ w stanie wysokim. Podobnie jak w bramce OR , dostńôpne sńÖ takie bramki AND 3- i 4- wejŇõciowe (czasem o wińôkszej liczbie wejŇõńá ). Na przykŇāad 8-wejŇõciowa bramka AND bńôdzie miaŇāa wyjŇõcie w stanie wysokim tylko wtedy , gdy wszystkie wejŇõcia bńôdńÖ w stanie wysokim. W algebrze Boole'a symbolowi AND odpowiada ( • ) . MoŇľe byńá ona pominińôta , co jest powszechnie stosowane.
BRAMKA EXCLUSIVE - OR
wejŇõcia |
wyjŇõcia |
0 0 |
0 |
0 1 |
1 |
1 0 |
1 |
1 1 |
0 |
Exclusive-or ( XOR , czyli wyŇāńÖcznie LUB ) jest ciekawńÖ funkcjńÖ, chociaŇľ mniej podstawowńÖ niŇľ AND i OR. WyjŇõcie bramki XOR jest w stanie wysokim, jeŇľeli jedno albo oba wejŇõcia sńÖ w stanie wysokim (jest to zawsze funkcja dw√≥ch zmiennych). M√≥wińÖc inaczej wyjŇõcie jest w stanie wysokim, jeŇľeli stany wejŇõńá sńÖ r√≥Ňľne. Bramka XOR realizuje dodawanie bit√≥w modulo-2 .
c) Przerzutniki.
Przerzutniki w swojej najprostszej wersji przyjmujńÖ nastńôpujńÖcńÖ postańá
ZaŇā√≥Ňľmy, Ňľe oba wejŇõcia A i B sńÖ w stanie wysokim. W jakich wińôc stanach znajdujńÖ sińô wyjŇõcia X i Y ? JeŇľeli X jest w stanie wysokim to oba wejŇõcia bramki G2 sńÖ w stanie wysokim, dajńÖc na wyjŇõciu Y stan niski. Zgodnie z tym X=H, co koŇĄczy analizńô ukŇāadu .Czy wszystko jest w porzńÖdku ?
X = H
Y = L
CoŇõ jest Ňļle ! UkŇāad jest symetryczny , wińôc r√≥wnie dobrze mogŇāoby byńá
X = L
Y = H
WyjŇõcie X i Y nie mogńÖ byńá jednoczeŇõnie w stanie niskim lub jednoczeŇõnie w stanie wysokim (poniewaŇľ A=B=H). Wobec tego ukŇāad ma dwa stabilne stany. Od poprzednich wydarzeŇĄ zaleŇľy to, w kt√≥rym ze stan√≥w sińô znajduje. Wpis do pamińôci polega na chwilowym wymuszeniu stanu niskiego na jednym z wejŇõńá ukŇāadu. JeŇľeli wejŇõciem tym jest A, to przerzutnik z pewnoŇõcińÖ ustawi sińô w stanie:
X=H
Y=L
niezaleŇľnie od swojego poprzedniego stanu .
PRZERZUTNIK JK
Zasada dziaŇāania przerzutnika JK jest podobna do zasady dziaŇāania przerzutnika D z tńÖ r√≥ŇľnicńÖ Ňľe ma on dwa wejŇõcia danych.
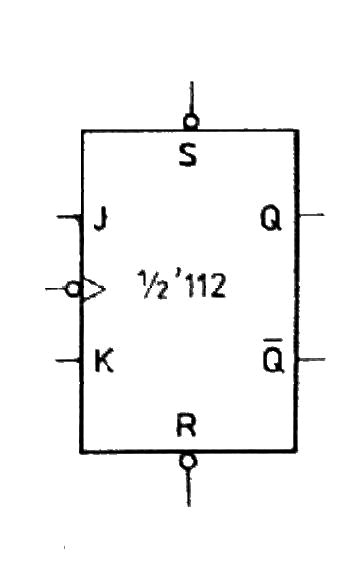
Wynika z niej , Ňľe jeŇľeli stany na wejŇõciach J i K sńÖ r√≥Ňľne to przy nastńôpnym aktywnym zboczu zegara wejŇõcie Q znajduje sińô w stanie niskim, to stan wyjŇõcia sińô nie zmieni jeŇľeli J i K sńÖ w stanie wysokim, to stan wyjŇõcia bńôdzie sińô zmieniaŇā na przeciwny przy kaŇľdym kolejnym impulsie zegara. W niekt√≥rych starszych przerzutnikach JK wystńôpuje efekt „Ňāapania jedynek”. Tego okreŇõlenia nie znajdzie sińô w danych katalogowych, ale dla nie uprzedzonego uŇľytkownika sprawa moŇľe mieńá powaŇľne konsekwencje. Problem polega na tym, Ňľe jeŇľeli wejŇõcie J lub wejŇõcie K (lub oba) zmieni na chwilńô sw√≥j stan w czasie trwania impulsu taktujńÖcego to mimo przywr√≥cenia jego stanu poczńÖtkowego przed kolejnym zboczem impulsu zegara przerzutnik „zapamińôta” ten chwilowy stan i zachowa sińô tak, jak by ten stan sińô utrzymywaŇā. Wobec tego przerzutnik moŇľe zmieniańá stan na nastńôpnym zboczu zegara chociaŇľ stan wejŇõńá J i K w momencie pojawienia sińô zbocza wskazuje na koniecznoŇõńá pozostawienia przerzutnika w tym samym stanie. MoŇľe to spowodowańá conajmniej osobliwe dziaŇāanie ukŇāadu. Problem wzińÖŇā sińô stńÖd , Ňľe przerzutniki dwuzboczowe projektowano z myŇõlńÖ o ich taktowaniu bardzo kr√≥tkimi impulsami, podczas gdy zazwyczaj taktuje sińô je czymkolwiek. Trzeba wińôc zachowańá ostroŇľnoŇõńá, gdy stosuje sińô przerzutniki master - slave, albo unikańá ich zupeŇānie i zastńôpowańá prawdziwymi przerzutnikami wyzwalanymi zboczem. WykorzystujńÖc wŇāaŇõciwoŇõńá przerzutnika polegajńÖcńÖ na zmianie stanu po kaŇľdym impulsie zegara, moŇľna Ňāatwo wykonańá ukŇāad dzielenia czńôstotliwoŇõci przez 2. PrzykŇāad takiego ukŇāadu pokazano na rysunku .
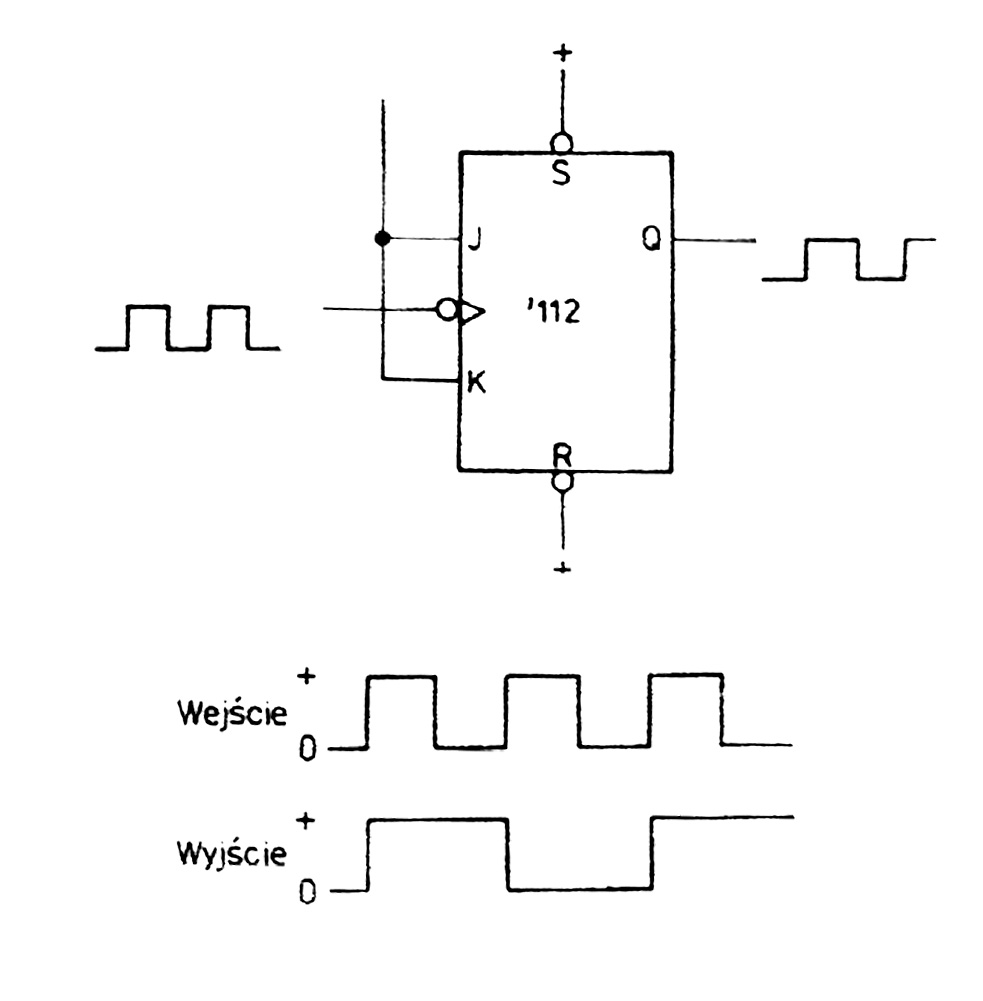
Dzielnik JK zmienia stan na przeciwny po kaŇľdym impulsie zegara, gdy jego oba wejŇõcia utrzymane sńÖ w stanie wysokim. W kaŇľdym przypadku czńôstotliwoŇõńá przebiegu wyjŇõciowego jest dwukrotnie mniejsza od czńôstotliwoŇõci przebiegu wejŇõciowego.
Liczniki.
Licznik moŇľna zbudowańá z przerzutnik√≥w bistabilnych. Wiele takich ukŇāad√≥w w r√≥Ňľnych wersjach jest dostńôpnych w postaci gotowych ukŇāad√≥w scalonych. W postaci popularnych ukŇāad√≥w 4-bitowych sńÖ dostńôpne liczniki BCD (dzielńÖce przez 10) i liczniki binarne (albo szesnastkowe, dzielńÖce przez 16). Produkuje sińô takŇľe liczniki o wińôkszej liczbie stopni, do 24, chociaŇľ nie wszystkie wyjŇõcia takich licznik√≥w sńÖ wyprowadzone na zewnńÖtrz. KolejnńÖ klasńô stanowińÖ liczniki modulo n. UmoŇľliwiajńÖ one dzielenie czńôstotliwoŇõci wejŇõciowej przez liczbńô n, zadawanńÖ jako sŇāowo wejŇõciowe . Liczniki mogńÖ byńá ŇāńÖczone kaskadowo w celu zwińôkszenia liczby stopni. Bardzo istotnym rozr√≥Ňľnieniem jest to, czy licznik jest asynchroniczny czy teŇľ synchroniczny w tym drugim stan wszystkich przerzutnik√≥w zmienia sińô jednoczeŇõnie podczas gdy w liczniku asynchronicznym kaŇľdy stopieŇĄ jest taktowany sygnaŇāem wyjŇõciowym z poprzedniego stopnia. W licznikach asynchronicznych wystńôpujńÖ stany przejŇõciowe, poniewaŇľ mŇāodsze stopnie przerzucajńÖ sińô nieco wczeŇõniej niŇľ starsze.Np.licznik asynchroniczny od stanu 7(0111) do 8 (1000) przechodzi poprzez stany 6, 4 i 0. Nie stwarza to kŇāopot√≥w w dobrze zaprojektowanym ukŇāadzie, ale moŇľe spowodowańá problemy, jeŇľeli jest to ukŇāad , w kt√≥rym bramki majńÖ wykrywańá konkretny stan licznika(w tym miejscu moŇľna zastosowańá przerzutnik D, kt√≥ry zapewni badanie stanu jedynie na zboczu zegara). Liczniki asynchroniczne sńÖ wolniejsze niŇľ synchroniczne poniewaŇľ akumulujńÖ op√≥Ňļnienie sygnaŇāu. Z uwagi na ŇāatwoŇõńá ŇāńÖczenia w wińôksze zespoŇāy(na zasadzie poŇāńÖczenia wyjŇõcia Q jednego licznika bezpoŇõrednio z wejŇõciem nastńôpnego licznika), liczniki asynchroniczne sńÖ taktowane zboczem opadajńÖcym.Liczniki synchroniczne zmieniajńÖ stan w odpowiedzi na narastajńÖce zbocze zegara . Niekt√≥re liczniki mogńÖ liczyńá w obu kierunkach, w zaleŇľnoŇõci od stanu specjalnych wejŇõńá. IstniejńÖ dwa sposoby sterowania kierunkiem zliczania:
licznik ma specjalne wejŇõcie, oznaczone symbolem U/D',sŇāuŇľńÖce do ustalania kierunku zliczania ,
licznik ma dwa wejŇõcia zegarowe, jedno oznaczone jako UP, sŇāuŇľńÖce do normalnego zliczania, i drugie - oznaczone jako DOWN, sŇāuŇľńÖce do zliczania wstecz.
Niekt√≥re liczniki majńÖ wejŇõcia danych, umoŇľliwiajńÖce ustawienie tych licznik√≥w w zadanym stanie poczńÖtkowym . Jest to wygodne gdy trzeba, np. zrealizowańá licznik modulo n . „ŇĀadowanie” licznika moŇľe byńá synchroniczne lub asynchroniczne . ŇĀadowanie synchroniczne oznacza, Ňľe dane znajdujńÖce sińô na wejŇõciach programujńÖcych sńÖ wpisywane do licznika najbliŇľszym zboczem zegara po uaktywnieniu linii sterujńÖcej LOAD' , to jest po jej ustawieniu w stanie niskim. ŇĀadowanie asynchroniczne oznacza ,Ňľe dane wejŇõciowe sńÖ wpisywane do licznika natychmiast po uaktywnieniu wejŇõcia LOAD' , niezaleŇľnie od stanu zegara. Niekiedy uŇľywa sińô terminu „wpis r√≥wnolegŇāy”, poniewaŇľ wszystkie bity sńÖ Ňāadowane r√≥wnoczeŇõnie . Niekt√≥re ukŇāady licznikowe sńÖ wyposaŇľone w rejestry zatrzaskowe, umieszczone mińôdzy wyjŇõciami licznika a wyjŇõciami ukŇāadu. Rejestry te sńÖ zawsze przeŇļroczyste , dzińôki czemu moŇľna wykorzystańá licznik r√≥wnieŇľ tak jakby tych rejestr√≥w nie byŇāo. Trzeba pamińôtańá Ňľe kaŇľdy licznik Ňāadowany r√≥wnolegle moŇľe sŇāuŇľyńá jako rejestr, ale nie moŇľna w nim zliczańá w czasie, w kt√≥rym sńÖ przetrzymywane dane, co jest moŇľl;iwe w ukŇāadzie licznikowym wyposaŇľonym w rejestr.
Rejestry.
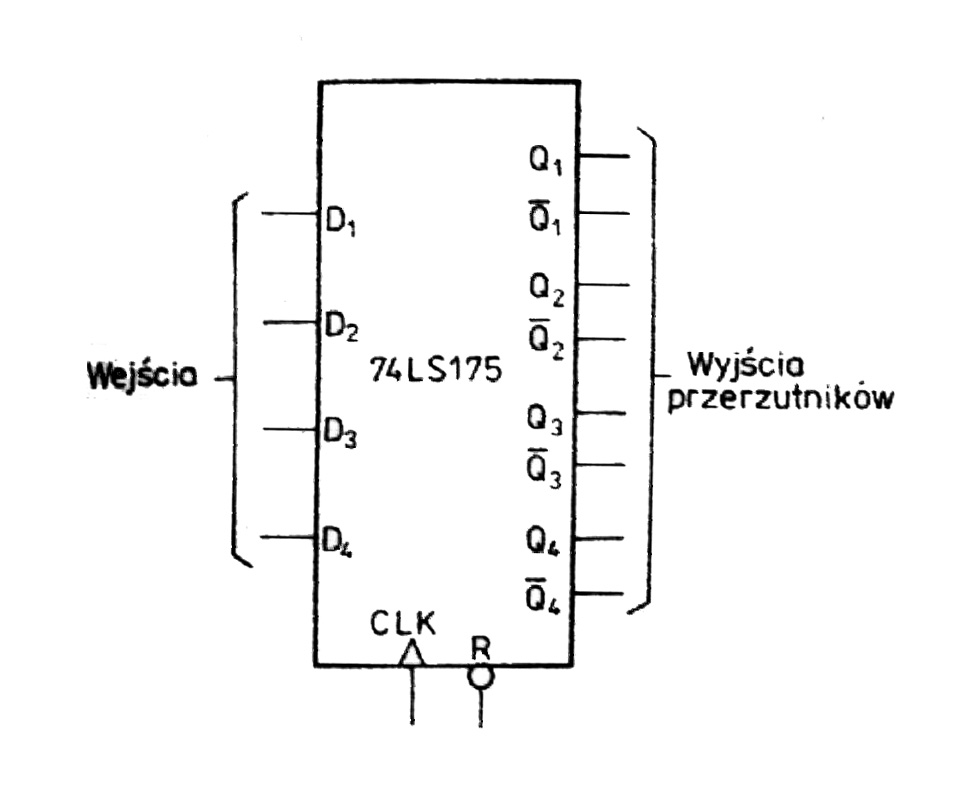
Rejestry sŇāuŇľńÖ do „przechowywania” ustalonego zestawu bit√≥w, nawet jeŇľeli stany wejŇõńá ulegajńÖ zmianom . ZestawiajńÖc razem kilka przerzutnik√≥w D moŇľna utworzyńá rejestr, lecz na og√≥Ňā bńôdzie on mieńá wińôcej wejŇõńá i wyjŇõńá niŇľ to jest potrzebne. JeŇõli przerzutniki rejestru nie muszńÖ mieńá osobno wyprowadzeŇĄ linii zegarowych ani oddzielnych wejŇõńá ustawiajńÖcych i zerujńÖcych , moŇľna odpowiednie wejŇõcia poŇāńÖczyńá razem co zaoszczńôdza nieco wyprowadzeŇĄ i pozwala umieŇõcińá 8 przerzutnik√≥w w standardowej 20 - koŇĄc√≥wkowej obudowie. Na rysunku pokazano rejestr zŇāoŇľony z czterech przerzutnik√≥w D z wyjŇõciami prostymi i komplementarnymi.
Oto pobieŇľny przeglńÖd ukŇāad√≥w rejestrowych.
Pamińôci o dostńôpie swobodnym.Jest to ( na og√≥Ňā duŇľy ) zbi√≥r rejestr√≥w do kt√≥rych moŇľna wpisywańá informacje i z kt√≥rych informacje moŇľna odczytywańá, lecz operacje te moŇľna wykonywańá tylko na pojedyŇĄczych rejestrach . PojemnoŇõci pamińôci RAM mieszczńÖ sińô w zakresie od kilku bajt√≥w do wielu megabajt√≥w .Pamińôci te sńÖ stosowane przede wszystkim w sprzńôcie mikroprocesorowym.
Adresowalne rejestry zatrzaskowe . SńÖ to rejestry wielobitowe, w kt√≥rych moŇľliwa jest selektywna zmiana stanu pojedyŇĄczych zatrzask√≥w bez zmiany stan√≥w pozostaŇāych .
Rejestry zatrzaskowe lub zwykŇāe ,wbudowane w wińôksze ukŇāady scalone, np. w przetworniki cyfrowo - analogowe.UrzńÖdzenie wyposaŇľone w rejestry wejŇõciowe wymagajńÖ jedynie chwilowego doprowadzenia sygnaŇā√≥w do wejŇõńá (wraz z wŇāaŇõciwym zboczem zegara) - potem dane sńÖ pamińôtane w rejestrze.
JeŇľeli poŇāńÖczy sińô szereg przerzutnik√≥w typu D w ten spos√≥b Ňľe kaŇľde wyjŇõcie Q poŇāńÖczone jest z nastńôpnym wejŇõciem D , a wszystkie wejŇõcia zegarowe sńÖ taktowane z jednego Ňļr√≥dŇāa , to otrzyma sińô coŇõ , nazywane jest „rejestrem przesuwajńÖcym''. W kaŇľdym takcie zegara zawarty w rejestrze wz√≥r zŇāoŇľony z zer i jedynek przesuwa sińô w prawo , przy czym dane wchodzńÖ przez znajdujńÖce sińô z lewej strony wejŇõcie D pierwszego przerzutnika. Tak jak w przypadku zwykŇāych przerzutnik√≥w, do pierwszego stopnia wprowadzana jest informacja znajdujńÖca sińô na wejŇõciu tuŇľ przed pojawieniem sińô impulsu zegara, a ukŇāad ma typowe op√≥Ňļnienie. Rejestry mogńÖ byńá wińôc ŇāńÖczone szeregowo bez obawy o ewentualne wyŇõcigi logiczne. Rejestry przesuwajńÖce sińô sńÖ bardzo uŇľyteczne w ukŇāadach zamiany danych r√≥wnolegŇāych (n bit√≥w obecnych r√≥wnoczeŇõnie na n r√≥Ňľnych liniach wejŇõciowych) na dane szeregowe (bit po bicie, na jednej linii) i odwrotnie. BywajńÖ takŇľe stosowane jako pamińôci szczeg√≥lnie tam gdzie jest zachowany porzńÖdek zapisu i odczytu danych. Podobnie jak rejestry r√≥wnolegŇāe i liczniki, takŇľe rejestry przesuwajńÖce sńÖ produkowane w wielu wersjach. Standardem sńÖ rejestry 4 - bitowe i 8 - bitowe. IstniejńÖ takŇľe rejestry dŇāuŇľsze do 64 bit√≥w a nawet wińôcej. SńÖ r√≥wnieŇľ wykonywane rejestry o zmiennej dŇāugoŇõci, np. ukŇāad 4557, kt√≥rego dŇāugoŇõńá moŇľe byńá zaprogramowana w zakresie od 1 do 64 za pomocńÖ 6- bitowego wejŇõcia programujńÖcego. WińôkszoŇõńá ukŇāad√≥w scalonych zawiera tylko jeden rejestr przesuwajńÖcy, sńÖ jednak produkowane takŇľe zespoŇāy dw√≥ch , czterech a nawet szeŇõciu rejestr√≥w przesuwajńÖcych. WińôkszoŇõńá rejestr√≥w przesuwajńÖcych przesuwa dane tylko w prawo. IstniejńÖ takŇľe rejestry dwukierunkowe , w kt√≥rych dane moŇľna przesuwańá w lewo dopiero po poŇāńÖczeniu wyjŇõcia kaŇľdego stopnia z wejŇõciem ŇāadujńÖcym stopnia poprzedniego i po r√≥wnolegŇāym zaŇāadowaniu danych. MaŇāe rejestry przesuwajńÖce mogńÖ zawierańá r√≥wnolegŇāe wejŇõcia lub wyjŇõcia i zwykle je majńÖ. Rejestry przesuwajńÖce o wińôkszej dŇāugoŇõci majńÖ zazwyczaj tylko po jednym wejŇõciu i wyjŇõciu szeregowym, tzn. dostńôpne jest tylko wejŇõcie pierwszego przerzutnika i wyjŇõcie ostatniego. Czasem wyposaŇľa sińô je dodatkowo w kilka wybranych wejŇõńá poŇõrednich. Niekt√≥re ukŇāady z rejestrami przesuwajńÖcymi majńÖ wbudowane wejŇõciowe lub wyjŇõciowe rejestry zatrzaskowe. Dla takich ukŇāad√≥w moŇľliwe jest r√≥wnoczesne przesuwanie danych oraz r√≥wnolegŇāe Ňāadowanie lub wyprowadzanie danych. Funkcjńô rejestru przesuwajńÖcego moŇľe zawsze peŇānińá pamińôńá RAM (ale nie odwrotnie) wyposaŇľona w zewnńôtrzny licznik wytwarzajńÖcy kolejne adresy.
f) WiadomoŇõci wstńôpne o fali akustycznej.
Parametrami charakteryzujńÖcymi falńô dŇļwińôkowńÖ sńÖ: prńôdkoŇõńá fali , czńôstotliwoŇõńá drgaŇĄ, dŇāugoŇõńá fali, prńôdkoŇõńá akustyczna , ciŇõnienie akustyczne, natńôŇľenie dŇļwińôku i moc akustyczna. SńÖ one wielkoŇõciami obiektywnymi , poniewaŇľ moŇľna je zmierzyńá odpowiednimi przyrzńÖdami.
PrńôdkoŇõńá fali dŇļwińôkowej, czyli prńôdkoŇõńá dŇļwińôku okreŇõla sińô dŇāugoŇõcińÖ drogi, kt√≥rńÖ przebńôdzie zaburzenie r√≥wnowagi oŇõrodka w cińÖgu jednej sekundy. PrńôdkoŇõńá rozchodzenia sińô fal zaleŇľy od rodzaju i wŇāaŇõciwoŇõci oŇõrodka (gaz√≥w, cieczy i ciaŇā staŇāych ) oraz temperatury. Nie zaleŇľy ona natomiast od prńôdkoŇõci drgaŇĄ czńÖstek oŇõrodka, ani od czńôstotliwoŇõci drgania, kt√≥re wywoŇāaŇāo falńô. PrńôdkoŇõńá jest wielkoŇõcińÖ wyraŇľonńÖ w metrach na sekundńô.
Okresem jest czas T wyraŇľany w sekundach lub w ich uŇāamkach , w kt√≥rym fala dŇļwińôkowa przebiega okreŇõlonńÖ odlegŇāoŇõńá r√≥wnńÖ őĽ (dŇāugoŇõńá fali)
CzńôstotliwoŇõńá f drgaŇĄ sinusoidalnych okreŇõla sińô liczbńÖ okres√≥w (sinusoid) wystńôpujńÖcych w cińÖgu jednej sekundy. CzńôstotliwoŇõńá okreŇõlana jest w hercach (Hz). Mińôdzy czńôstotliwoŇõcińÖ drgaŇĄ (f) i okresem fali (T) wystńôpuje zaleŇľnoŇõńá kt√≥rńÖ ilustrujńÖ poniŇľsze wzory:
f = 1/T lub T = 1/f
DŇļwińôki o czńôstotliwoŇõci w zakresie 16 - 20 000 Hz sńÖ sŇāyszalne dla czŇāowieka. NiesŇāyszalne zjawiska dŇļwińôkowe przenoszone przez fale o czńôstotliwoŇõci powyŇľej 20 kHz nazywamy ultradŇļwińôkami , powyŇľej 100 kHz hiperdŇļwińôkami , a poniŇľej 16 Hz infradŇļwińôkami.
ZnajńÖc prńôdkoŇõńá dŇļwińôku c (w m\ s) i czńôstotliwoŇõńá drgaŇĄ Ňļr√≥dŇāa f moŇľna wyznaczyńá dŇāugoŇõńá drogi , jakńÖ przebiega fala dŇļwińôkowa w czasie r√≥wnym czasowi trwania jednego okresu , zwanńÖ dŇāugoŇõcińÖ fali dŇļwińôkowej őĽ (w metrach).
őĽ = cT = c \ f
DŇāugoŇõńá fali dŇļwińôkowej jest r√≥wna odlegŇāoŇõci mińôdzy dwoma sńÖsiednimi grzbietami (dolinami) lub wńôzŇāami tego samego typu. DŇāugoŇõci fal dŇļwińôkowych w powietrzu wynoszńÖ od 21 m (dla 16 Hz) do 1, 7 cm (dla 20 kHz) .
Od czńôstotliwoŇõci i natńôŇľenia dŇļwińôku uzaleŇľniona jest prńôdkoŇõńá akustyczna. Jest to prńôdkoŇõńá, z jakńÖ drga czńÖstka oŇõrodka po wytrńÖceniu jej z pierwotnego poŇāoŇľenia w stanie r√≥wnowagi. Im gŇāoŇõniejszy i wyŇľszy jest ton (dŇļwińôk) , tym wińôksza jest prńôdkoŇõńá. PrńôdkoŇõńá akustyczna jest bardzo maŇāa w por√≥wnaniu z prńôdkoŇõcińÖ rozchodzenia sińô dŇļwińôku. P.[rz bardzo gŇāoŇõnych dŇļwińôkach wartoŇõńá skuteczna tej prńôdkoŇõci nie przekracza 0,1 m.\s .
Kolejnym parametrem charakteryzujńÖcym falńô dŇļwińôkowńÖ jest ciŇõnienie akustyczne (p.) , kt√≥re stanowi r√≥Ňľnica mińôdzy ciŇõnieniem istniejńÖcym w oŇõrodku w czasie pojawienia sińô fali dŇļwińôkowej a ciŇõnieniem atmosferycznym. Zmiany ciŇõnienia odpowiadajńÖce ciŇõnieniom akustycznym stanowińÖ czńôŇõńá wartoŇõci ciŇõnienia atmosferycznego. W cinieniu akustycznym moŇľemy rozr√≥Ňľnińá amplitudńô i wartoŇõńá akustycznńÖ , kt√≥rńÖ mierzymy w niutonach na metr kwadratowy lub mikrobach .
CechńÖ obiektywnńÖ dŇļwińôku jest natńôŇľenie , zwane r√≥wnieŇľ intensywnoŇõcińÖ ( I ). Jest to iloŇõńá energii dŇļwińôkowej przepŇāywajńÖcej w jednostce czasu przez powierzchnińô prostopadŇāńÖ do kierunku rozchodzenia
sińô fali. NatńôŇľenie dŇļwińôku maleje z kwadratem odlegŇāoŇõci od punktowego Ňļr√≥dŇāa dŇļwińôku. Mierzymy je w watach na metr kwadratowy.
Ze wzglńôdu na to , Ňľe niezbyt wygodne jest uŇľywanie pojńôcia „natńôŇľenie'' oraz fakt , Ňľe wraŇľenia sŇāuchacza nie zwińôkszajńÖ sińô proporcjonalnie do natńôŇľenia , lecz do jego logarytmu , wprowadzono nowe pojńôcie fizyczne - poziom natńôŇľenia (poziom intensywnoŇõci) oznaczany przez i. R√≥Ňľnicńô poziomu natńôŇľenia odpowiadajńÖcńÖ ilorazowi natńôŇľenia 10:1 okreŇõlono jako jednostkńô poziomu natńôŇľenia i nadano jej nazwńô bel (B). NajczńôŇõciej jednak uŇľywa sińô dziesińôciokrotnie mniejszej jednostki od bela zwanej decybelem (dB). Poziom natńôŇľenia dla najmniejszej wartoŇõci intensywnoŇõci wynosi 0 dB , a najwyŇľszy - 130 dB.
ZnajńÖc natńôŇľenie dŇļwińôku moŇľna okreŇõlińá moc akustycznńÖ Ňļr√≥dŇāa dŇļwińôku, czyli iloŇõńá energii akustycznej wypromieniowanej przez to Ňļr√≥dŇāo w jednostce czasu (1s). MocńÖ akustycznńÖ PA otrzymujemy mnoŇľńÖc natńôŇľenie dŇļwińôku I przez powierzchnińô S , kt√≥rńÖ przepŇāywa fala dŇļwińôkowa, i wyraŇľamy jńÖ w watach (W) lub w innych czńôŇõciach - miliwatach i mikrowatach. Moce akustyczne wystńôpujńÖce podczas mowy wynoszńÖ od 0,01 őľW (szept) do 2 mW (krzyk). W muzyce moc akustyczna dochodzi do 25 W.
5. Koncepcje rozwińÖzania.
Cyfrowy miernik przesunińôcia fazowego.
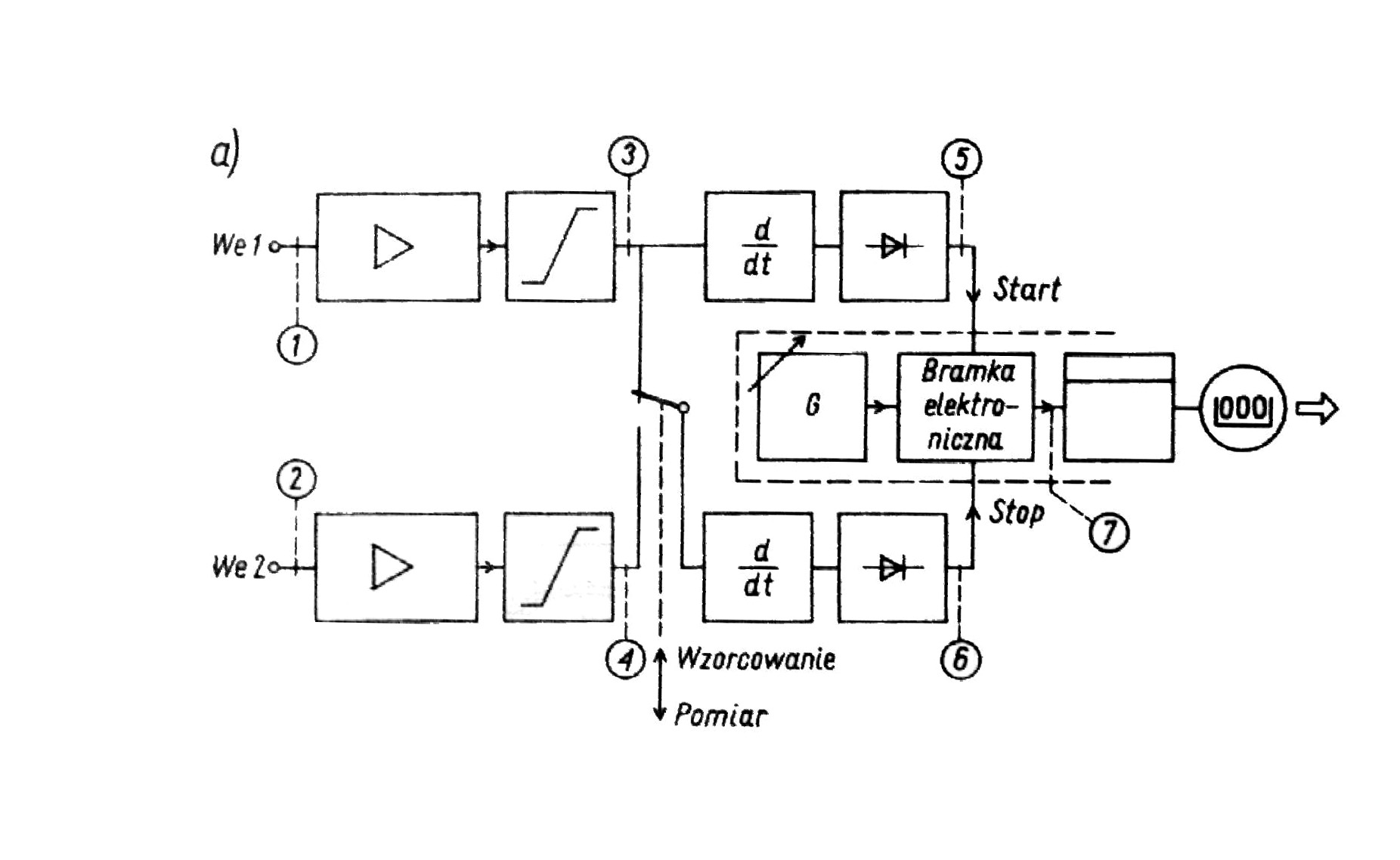
Schemat blokowy miernika
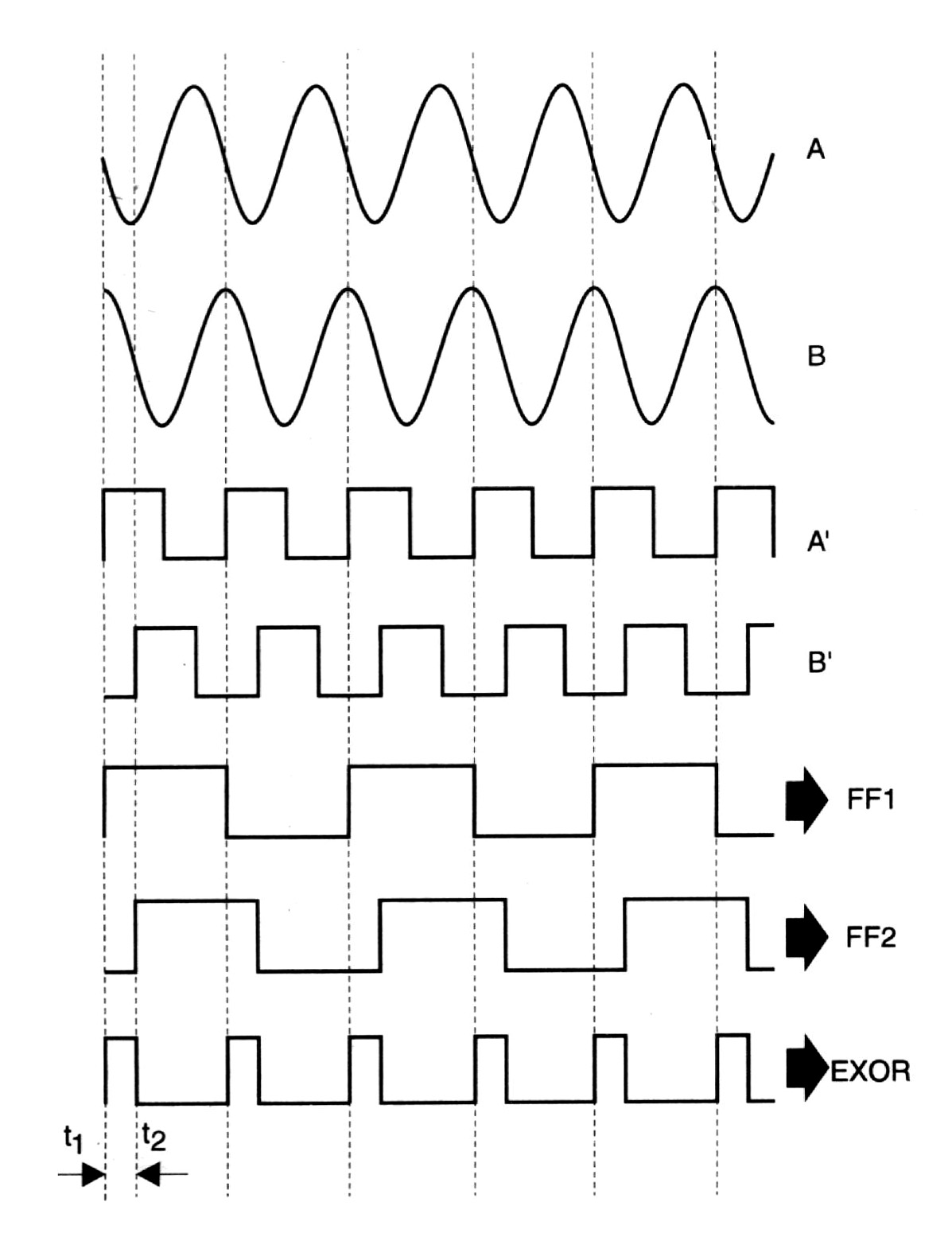
Przebiegi czasowe wyjaŇõniajńÖce zasadńô dziaŇāania miernika.
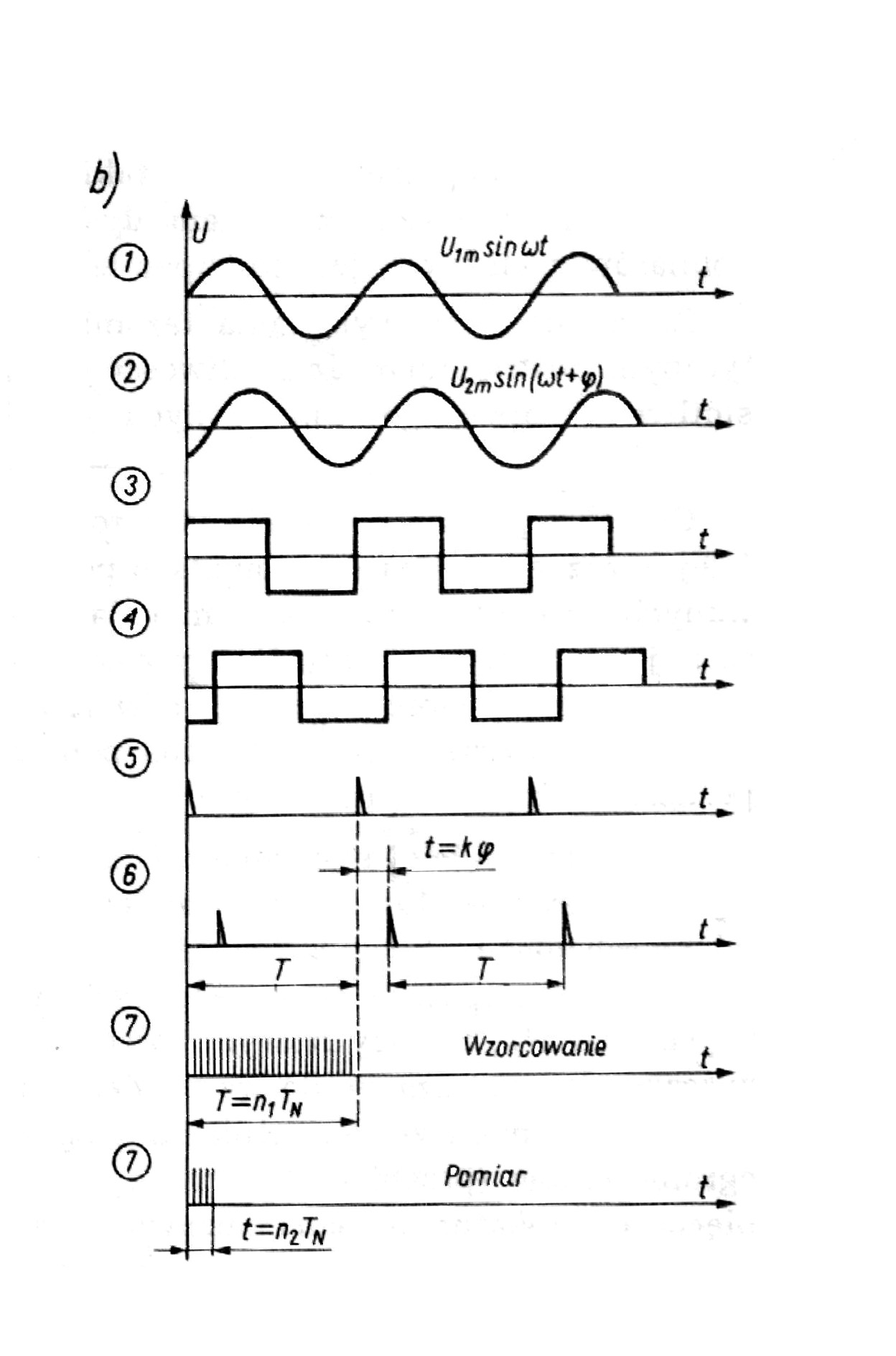
Metoda pomiaru cyfrowego polega na zastosowaniu czasomierza cyfrowego do pomiaru czas√≥w t i T. Zasada dziaŇāania takiego miernika jest nastńôpujńÖca . Napińôcia U1 i U2 mińôdzy , kt√≥rymi naleŇľy zmierzyńá przesunińôcie fazowe , podŇāńÖczone sńÖ do We1 i We2. Po wzmocnieniu , ograniczeniu amplitudy i zr√≥Ňľniczkowaniu w identycznych obwodach wejŇõciowych őô i őôőô otrzymuje sińô cińÖgi impuls√≥w przesunińôtych wzglńôdem siebie o czas t , bńôdńÖcym miarńÖ przesunińôcia fazowego Ōē. Impulsy te sterujńÖ bramkńÖ elektronicznńÖ w taki spos√≥b , Ňľe impuls otrzymany podczas przejŇõcia przez zero przebiegu U1 otwiera bramkńô , a impuls otrzymany podczas przejŇõcia przez zero przebiegu U2 - jńÖ zamyka. W czasie otwarcia bramki dochodzńÖ do licznika impulsy z generatora wzorcowego.Pomiar jest wykonywany w dw√≥ch nastńôpujńÖcych po sobie krokach :
PrzeŇāńÖcznik P. ustawia sińô w pozycjńô WZORCOWANIE i mierzy sińô okres T sygnaŇā√≥w wejŇõciowych
T = n1 \ fN = n1TN
PrzeŇāńÖcznik P. ustawia sińô w pozycjńô POMIAR i mierzy sińô odcinek czasu t , bńôdńÖcy miarńÖ przesunińôcia fazowego Ōē , przez odczyt wskazaŇĄ n2
t = n2TN
WartoŇõńá przesunińôcia fazowego Ōē okreŇõla sińô ze wzoru
Ōē = 360t \ T = 360n2TN \ n1TN = 360n2 \ n1
BŇāńÖd pomiaru wartoŇõci Ōē moŇľna okreŇõlińá w podobny spos√≥b jak dla pomiaru odcink√≥w czasu lub okres√≥w. W wykonaniach praktycznych w fazomierzach cyfrowych uzyskuje sińô dokŇāadnoŇõńá 0,1...0,5¬į w zakresie czńôstotliwoŇõci akustycznych.
Cyfrowy pomiar przesunińôcia fazowego stosuje sińô coraz czńôŇõciej w r√≥Ňľnego rodzaju automatach pomiarowo-kontrolnych , uŇľywanych do kontroli produkcji metodńÖ por√≥wnywania wielkoŇõci mierzonej z wzorcowńÖ w ukŇāadach r√≥Ňľnicowych. StosujńÖc fazomierze zamiast czńôstotliwoŇõciomierzy lub woltomierzy uzyskuje sińô bardzo dobrńÖ rozdzielczoŇõńá urzńÖdzenia pomiarowego, przy duŇľej odpornoŇõci na zakŇā√≥cenia zewnńôtrzne.
Fazomierz impulsowy.
Schemat blokowy miernika
Przebiegi czasowe wyjaŇõniajńÖce zasadńô dziaŇāania miernika
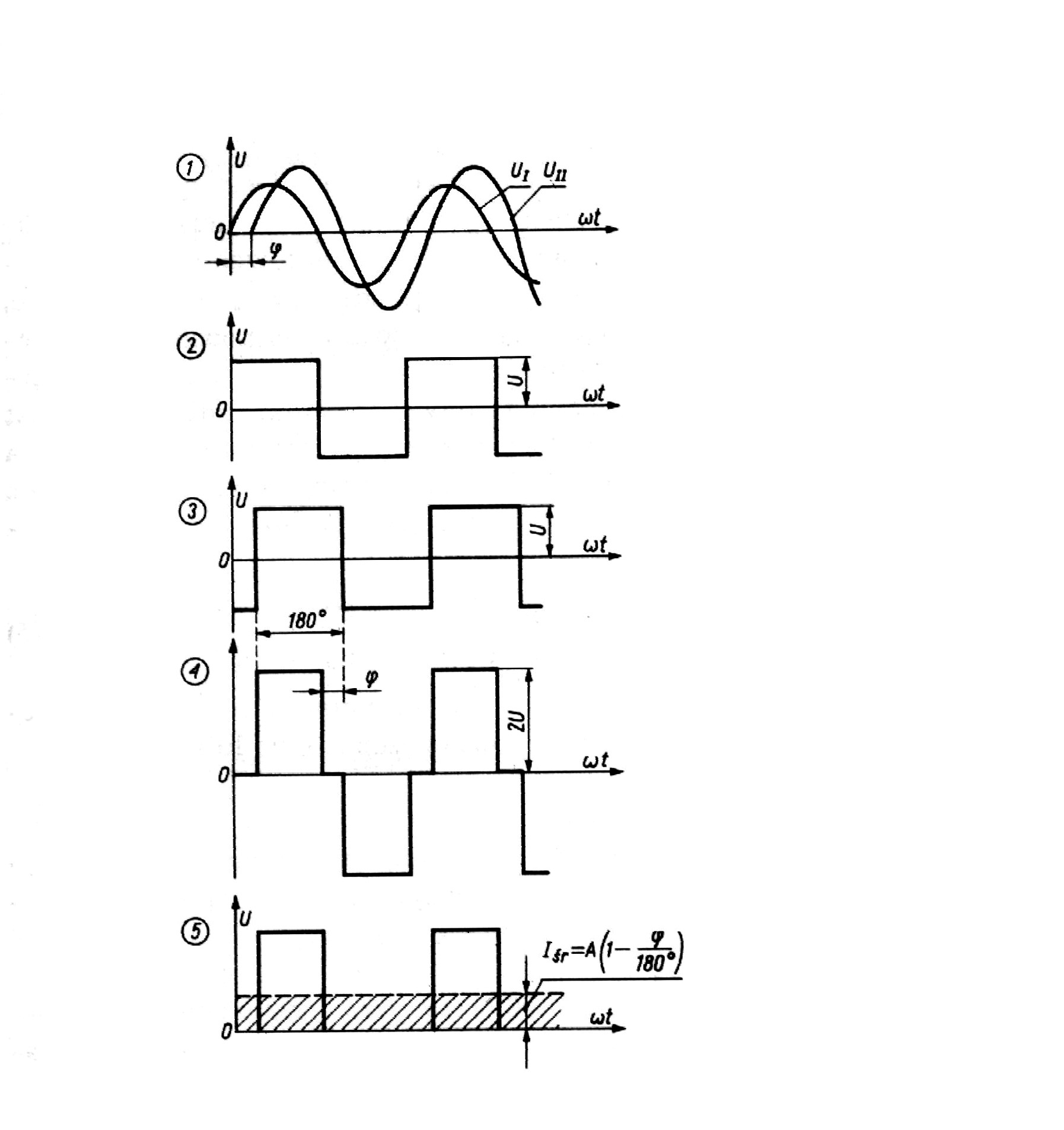
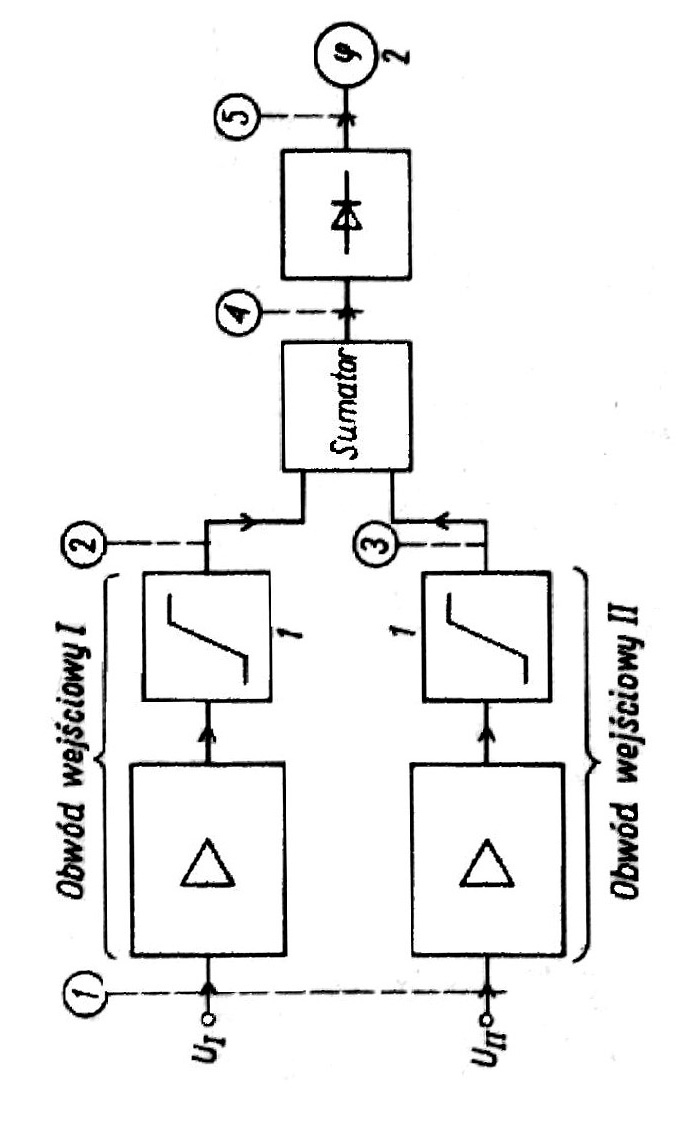
Zasada dziaŇāania fazomierza impulsowego jest nastńôpujńÖca. Napińôcie Uőô i Uőôőô , mińôdzy kt√≥rymi przesunińôcie fazowe naleŇľy wyznaczyńá, doprowadza sińô do wejŇõńá identycznych stopni normalizujńÖcych, zŇāoŇľonych ze wzmacniacza i ogranicznika . Na wyjŇõciach ogranicznik√≥w otrzymuje sińô napińôcia prostokńÖtne o znormalizowanej amplitudzie U i przesunińôte w fazie tak samo jak przebiegi wejŇõciowe Uőô i Uőôőô ,. Napińôcia te sńÖ nastńôpnie sumowane w czŇāonie sumujńÖcym (sumatorze). Przebieg wyjŇõciowy ma podw√≥jnńÖ amplitudńô 2U, a szerokoŇõńá impuls√≥w bńôdńÖcych funkcjńÖ mierzonego przesunińôcia fazowego Ōē, wynosi 180¬į- Ōē. WartoŇõńá Ňõrednia prńÖdu IŇöR przepŇāywajńÖcego przez miernik magneto elektryczny jest takŇľe liniowńÖ funkcjńÖ Ōē.
IŇöR = A ( 1 - Ōē/180¬į)
Fazomierze impulsowe typu opisanego pracujńÖ w zakresie czńôstotliwoŇõci akustycznych i nadakustycznych, przy amplitudzie napińôńá wejŇõciowych od miliwolt√≥w do kilku wolt√≥w i dokŇāadnoŇõci pomiaru 2... 3 %.
Realizacja rozwińÖzania.
Schemat blokowy miernika.
Przebiegi czasowe.
Od pomysŇāu do ukŇāadu.
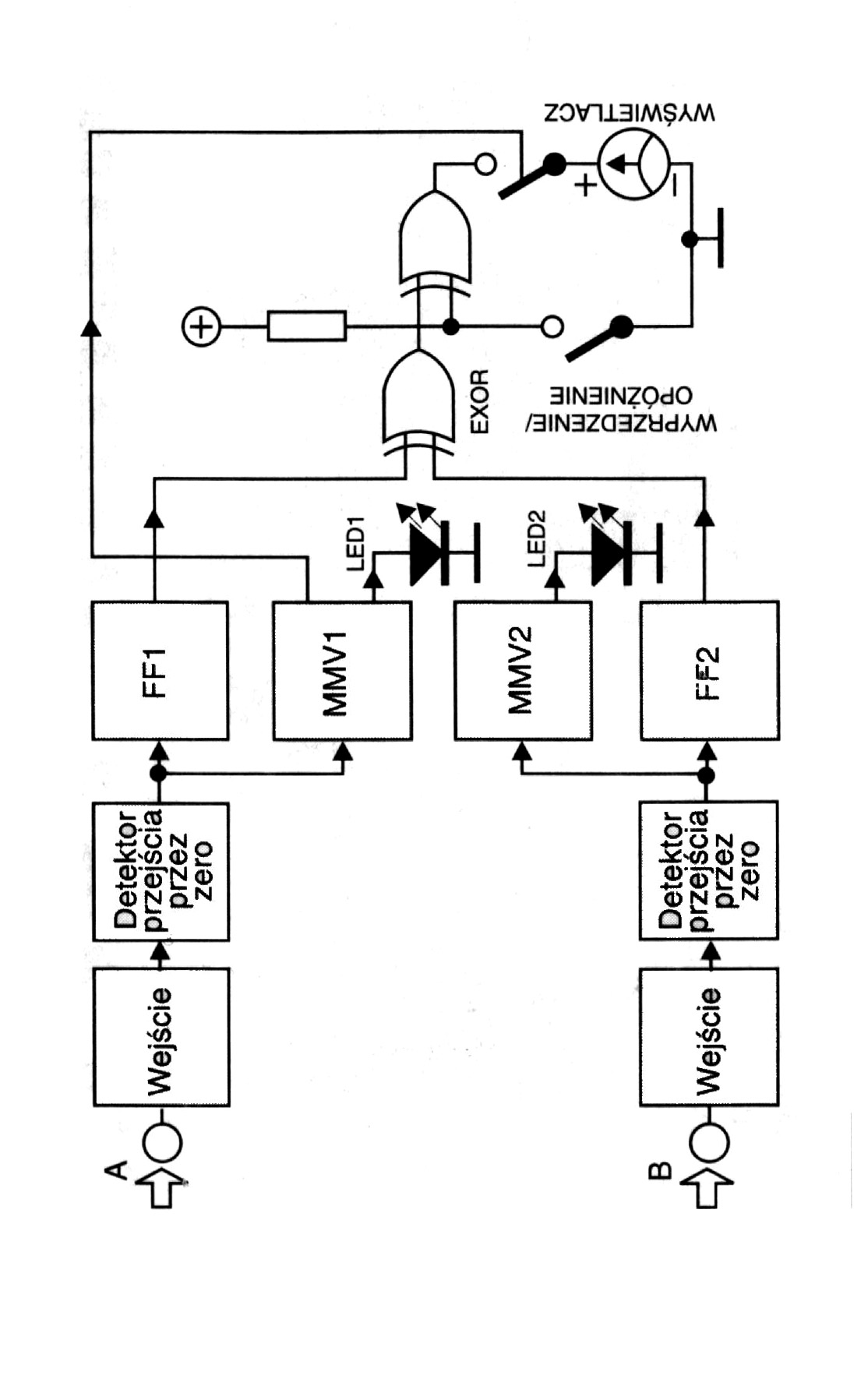
Na schemacie blokowym moŇľna zapoznańá sińô z poszczeg√≥lnymi blokami funkcjonalnymi urzńÖdzenia i poŇāńÖczeniami pomińôdzy nimi. Obydwa sygnaŇāy analogowe na wejŇõciach miernika fazowego trafiajńÖ do stopni wejŇõciowych , z kt√≥rych z sygnaŇā√≥w analogowych formowane sńÖ sygnaŇāy cyfrowe. Nie jest to wcale takie trudne: napińôciom dodatnim zostaje przyporzńÖdkowane logiczne „0”, natomiast napińôciom ujemnym - „1” . Na wykresie czasowym widoczne sńÖ dwa przesunińôte w fazie sygnaŇāy analogowe A i B, a pod nimi sygnaŇāy A' i B' po „digitalizacji”. SygnaŇāy A' i B' stajńÖ sińô nastńôpnie sygnaŇāami taktujńÖcymi dla dw√≥ch przerzutnik√≥w. Otrzymuje sińô w ten spos√≥b symetryczne sygnaŇāy o stosunku impuls / przerwa wynoszńÖcym dokŇāadnie 0,5 . Niewielkie odchylenia w dŇāugoŇõci dodatnich i ujemnych p√≥Ňāokres√≥w, szumy oraz maŇāe zakŇā√≥cenia nie majńÖ juŇľ wpŇāywu na dokŇāadnoŇõńá wynik√≥w pomiar√≥w.
R√≥Ňľnica czasowa pomińôdzy sygnaŇāami wyjŇõciowymi obydwu przerzutnik√≥w jest miarńÖ przesunińôcia fazowego pomińôdzy sygnaŇāami. SygnaŇāy trafiajńÖ nastńôpnie do bramki EXOR, na kt√≥rej wyjŇõciu poziom wysoki jest tylko wtedy, gdy na wejŇõciu sńÖ r√≥Ňľne sygnaŇāy. SzerokoŇõńá impulsu na bramce EXOR Ňõwiadczy o tym, jak bardzo sygnaŇā B jest op√≥Ňļniony w stosunku do sygnaŇāu A. Aby m√≥c r√≥wnieŇľ mierzyńá sytuacjńô odwrotnńÖ ( B wyprzedza A), istnieje druga bramka EXOR, kt√≥rej informacja stanowi zanegowanie w stosunku do pierwszej bramki, w zaleŇľnoŇõci od tego, w jakim poŇāoŇľeniu znajduje sińô przeŇāńÖcznik WYPRZEDZENIE / OP√ďŇĻNIENIE. JeŇõli jest on otwarty to bramka dokonuje negacji, w przeciwnym przypadku nic sińô nie zmienia. W obydwu przypadkach byŇā do dyspozycji sygnaŇā nadajńÖcy sińô do przetwarzania. MoŇľna zastosowańá przykŇāadowo zwykŇāy ukŇāad caŇākujńÖcy oraz miernik wskaz√≥wkowy , aby dokonywańá pomiaru przesunińôcia fazowego w spos√≥b analogowy. Obydwa multiwibratory monostabilne MMV1 i MMV2 przy pomocy LED√≥w sygnalizujńÖ, czy na gniazdach wejŇõciowych znajdujńÖ sińô sygnaŇāy nadajńÖce sińô do por√≥wnania. MMV1 jest dodatkowo wykorzystany do uaktywnienia instrumentu pomiarowego . JeŇõli jest podawane jedynie sygnaŇā A to wskaŇļnik musi pozostańá dokŇāadnie w poŇāoŇľeniu Ňõrodkowym. JeŇľeli tak nie jest , oznacza to ,Ňľe sygnaŇā wejŇõciowy nie nadaje sińô do pomiar√≥w fazowych.
WskaŇļnik analogowy ma istotne wady. Opr√≥cz maŇāej dokŇāadnoŇõci odczytu, przede wszystkim wystńôpuje silna zaleŇľnoŇõńá temperaturowa , a dla niskich czńôstotliwoŇõci konieczne sńÖ dŇāugie czasy caŇākowania (leniwy wskaŇļnik). DokŇāadniej, szybciej i wygodniej jest odczytańá r√≥Ňľnicńô faz w stopniach( 0...360¬į) bezpoŇõrednio na wyŇõwietlaczu.
Pomiar cyfrowy.
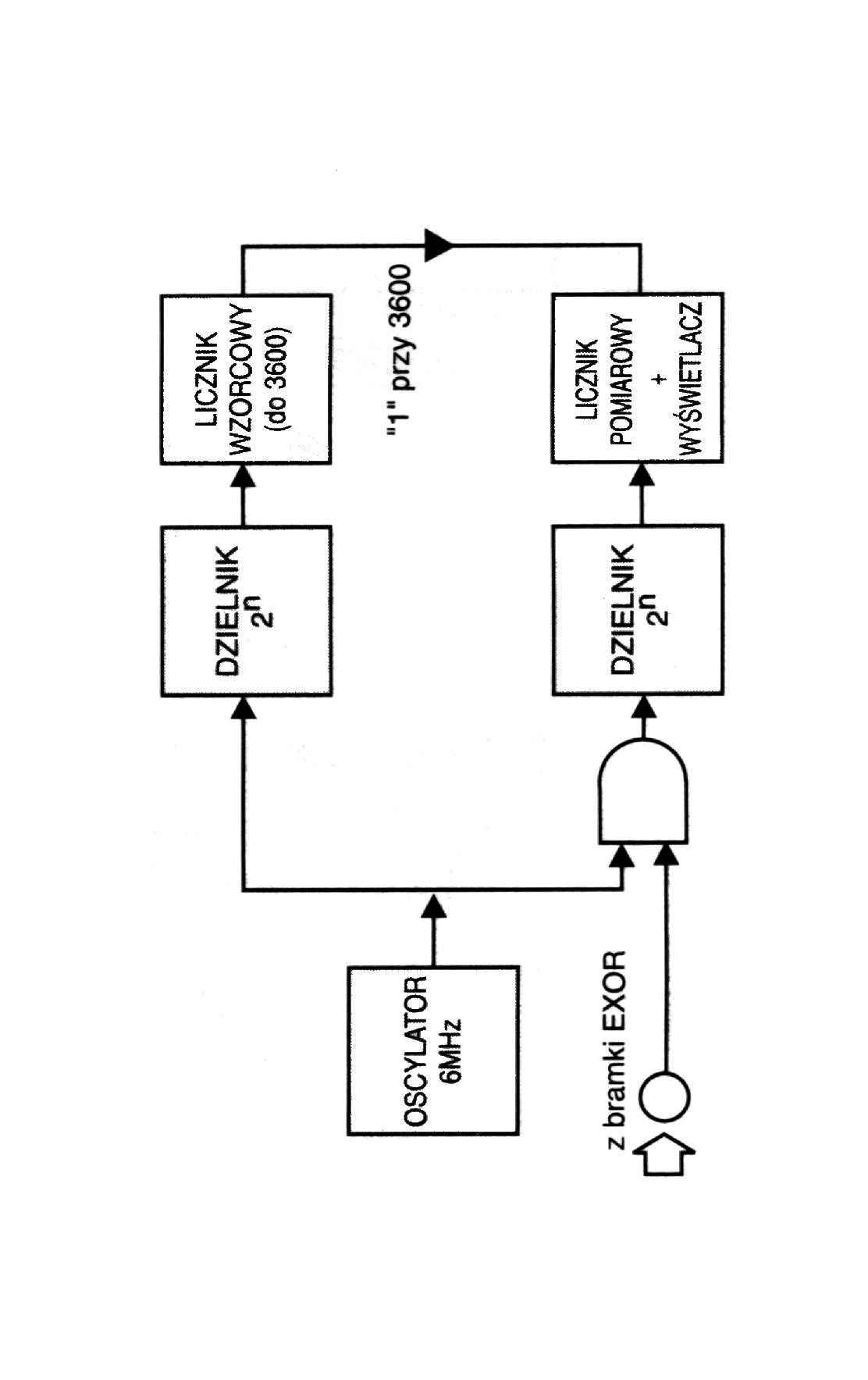
Miernik wskaz√≥wkowy moŇľe byńá oczywiŇõcie zastńÖpiony przez woltomierz cyfrowy , ale wymienione wady pozostanńÖ nadal. W tej sytuacji pom√≥c moŇľe jedynie prawdziwy pomiar cyfrowy. Na schemacie blokowym moŇľna przeŇõledzińá jak pracuje taki ukŇāad pomiarowy. Do bramki AND dochodzi wsp√≥lnie z sygnaŇāem wyjŇõciowym z bramki EXOR sygnaŇā o czńôstotliwoŇõci 6 MHz Na wyjŇõciu tej bramki sygnaŇā 6 MHz pojawia sińô jedynie wtedy gdy na wyjŇõciu bramki EXOR jest poziom wysoki. Impulsy te poprzez dzielnik 2n trafiajńÖ do licznika, gdzie sńÖ zliczane i wynik trafia do wyŇõwietlacza. SygnaŇā z oscylatora 6MHz taktuje jeszcze drugńÖ takńÖ kombinacjńô dzielnik / licznik , na kt√≥rej wyjŇõciu poziom co 3600 impuls√≥w jest wysoki. Tak wińôc na przesunińôcie fazowe o jeden stopieŇĄ przypada 10 impuls√≥w taktujńÖcych wińôc wyŇõwietlacz teoretycznie dysponuje rozdzielczoŇõcińÖ 0,1¬į. W praktyce jednak musimy zadowolińá sińô dokŇāadnoŇõcińÖ 1¬į, a mimo to cińÖgle jednak oznacza to tolerancjńô wynoszńÖcńÖ zaledwie 0,28%.
Druga kombinacja ma za zadanie zresetowańá licznik (jak r√≥wnieŇľ resztńô ukŇāadu) po 3600 impulsach zachowujńÖc jednak aktualny wynik na wyŇõwietlaczu( Latch). Na wyŇõwietlaczu ostatnia cyfra dziesińôtna (LSD) jest po prostu odrzucana, tak wińôc przy r√≥Ňľnicy fazowej wynoszńÖcej 0¬į mamy na wyŇõwietlaczu 0, dla 180¬į mamy 180 (1800 impuls√≥w), a dla 360 (360 impuls√≥w) analogicznie 360.
Czas, jaki jest potrzebny na odliczenie 3600 impuls√≥w , jest nazywany czasem bramki( szerokoŇõcińÖ bramki). Przyczyna tego jest nastńôpujńÖca. Po ustaleniu warunk√≥w pomiaru , poczńÖtek pomiaru jest zawsze staŇāy - na poczńÖtku okresu. Nastńôpnie mierzona jest iloŇõńá okres√≥w, jednak nie wiadomo, czy i w jaki spos√≥b zmieŇõci sińô w oknie pomiarowym ostatni okres. Rozpatrzmy nastńôpujńÖcy przykŇāad: okno pomiarowe obejmuje 10 okres√≥w. PoniewaŇľ ostatni okres nie jest pewny, wińôc maksymalny moŇľliwy bŇāńÖd wynosi 10%. W przypadku 200 okres√≥w maksymalny bŇāńÖd spada do 0,5% , a przy 1000 okres√≥w nawet do 0,1% . DokŇāadnoŇõńá pomiar√≥w zaleŇľy opr√≥cz tego od stosunku pomińôdzy czńôstotliwoŇõcińÖ pomiarowńÖ(6 MHz) a najwyŇľszńÖ czńôstotliwoŇõcińÖ mierzonego sygnaŇāu(okoŇāo 20 kHz) . Im wyŇľszy jest ten stosunek na korzyŇõńá czńôstotliwoŇõci pomiarowej , tym mniejsze bńôdńÖ bŇāńôdy.
CaŇāy ukŇāad elektroniczny zostaŇā podzielony na trzy pŇāytki i wŇāaŇõnie z tego powodu r√≥wnieŇľ schemat jest przedstawiony na trzech rysunkach. Na rysunku 1 znajdujńÖ sińô bloki peryferyjne - stopnie wejŇõciowe ( IC1 ,IC2) , wyb√≥r szerokoŇõci bramki (IC3,IC4) , sygnalizacja bŇāńôdu (T1...T4) i wyŇõwietlacz (LD1...LD3). Opr√≥cz tego wystńôpujńÖ dwie diody LED, kt√≥re informujńÖ o obecnoŇõci sygnaŇā√≥w wejŇõciowych. Na rysunku 2 przedstawiony jest ukŇāad przetwarzajńÖcy na 7 - segmentowy kod wyŇõwietlacza, kt√≥ry z szeregowego sygnaŇāu mierzonego formuje prawidŇāowy kod do sterowania wyŇõwietlaczem. Wreszcie na rysunku 6 jest przedstawiona pŇāyta gŇā√≥wna.
Zacznijmy jednak od stopni wejŇõciowych na rysunku 1 . DysponujńÖ one wysokńÖ impedancjńÖ wejŇõciowńÖ wynoszńÖcńÖ okoŇāo 1 Mő©. Kondensatory C1 iC4 stanowińÖ sprzńôŇľenie dla sygnaŇā√≥w m.cz., R10 - R11 tworzńÖ ukŇāad obniŇľania napińôcia, kt√≥ry zmniejsza wysokie napińôcie wejŇõciowe (max 100V) o okoŇāo 20 dB. W przypadku jeszcze wyŇľszych napińôńá wejŇõciowych naleŇľy stosowańá odpowiednie dzielniki. W Ňľadnym wypadku nie wolno modyfikowańá tego dzielnika do wyŇľszych napińôńá wejŇõciowych. NiŇľsze napińôcia wejŇõciowe, bez tŇāumienia przez rezystor R12, docierajńÖ do wzmacniacza operacyjnego IC1 , kt√≥ry stanowi dopasowanie impedancyjne (przetwornik). Diody D5 i D6 zabezpieczajńÖ ukŇāad scalony przed skokami napińôcia na wejŇõciu prostym. IC1 jest bardzo dobrze odsprzńôŇľony przez elementy R13 - C2 oraz R14 - C3 od tńôtnieŇĄ napińôcia zasilajńÖcego. Przy pomocy P1 moŇľliwe jest ustawienie skŇāadowej staŇāej napińôcia( offset ). Wszystko co zostaŇāo opisane dla wejŇõcia A dotyczy r√≥wnieŇľ wejŇõcia B.
Dalej sygnaŇāy przechodzńÖ przez pŇāytńô gŇā√≥wnńÖ (rys.3) . R√≥wnieŇľ i tutaj sygnaŇāy w obydwu kanaŇāach przechodzńÖ przez analogiczne podzespoŇāy. IC12 i IC14 pracujńÖ jako przerzutniki Schmitta, kt√≥re zamieniajńÖ sygnaŇā sinusoidalny na sygnaŇā cyfrowy . Z powodu bardzo duŇľego stosunku R49 do R47 histereza jest minimalna . Dzińôki temu zachowanie wzmacniacza operacyjnego bardziej przypomina komparator.Na schemacie blokowym ukŇāad IC12 odpowiada blokowi detektora przejŇõcia przez zero. Kondensator C12 powoduje, Ňľe ukŇāad nie reaguje na zakŇā√≥cenia w.cz. . R√≥wnieŇľ i przy tym wzmacniaczu operacyjnym przewidziano moŇľliwoŇõńá korekcji napińôcia „offset”. Do obydwu przerzutnik√≥w sńÖ przyŇāńÖczone multiwibratory bistabilne IC13a i IC13b. SńÖ one aktywne (high) w okresie pomińôdzy jednym, a drugim ujemnym przejŇõciem przez zero sygnaŇāu wejŇõciowego. R√≥wnolegle do tych przerzutnik√≥w sńÖ jeszcze wŇāńÖczone multiwibratory IC15a i IC15b . Ich staŇāe czasowe , wynoszńÖce okoŇāo 9s zostaŇāy tak dobrane , Ňľe nawet przy najniŇľszej czńôstotliwoŇõci sygnaŇāu wejŇõciowego nie nastńÖpi przeŇāńÖczenie MMV (multiwibratora monostabilnego).Diody LED przyŇāńÖczone do wejŇõńá Q ŇõwiecńÖ wińôc w spos√≥b cińÖgŇāy, gdy jest dostńôpny sygnaŇā wejŇõciowy. Zanim jednak dalej przeŇõledzimy przebieg sygnaŇā√≥w wejŇõciowych zwr√≥ńámy uwagńô na wyjŇõcie zanegowane ukŇāadu IC15b. Jest ono doprowadzone do dyskretnej bramki OR (D11 - D12) i przez nińÖ do wejŇõcia SET ukŇāadu IC23b.
SygnaŇāy obydwu kanaŇā√≥w trafiajńÖ wreszcie do bramek EXOR IC16a i IC16b. Wyprowadzenie 5 jest podŇāńÖczone do przeŇāńÖcznika S4 LEAD / LAG (wyprzedzenie / op√≥Ňļnienie) i w razie potrzeby dokonuje inwersji sygnaŇāu. Na wejŇõciu bramki AND ukŇāadu IC17a znajduje sińô teraz opisany wczeŇõniej sygnaŇā, kt√≥ry jest zaleŇľny od przesunińôcia fazowego.
Na dw√≥ch pozostaŇāych bramkach EXOR oraz X1, R59,C22 i C23 zostaŇā zbudowany buforowy generator kwarcowy 6MHz. SygnaŇā ten wystńôpuje na staŇāe na linii PULSE oraz jako sygnaŇā zmodulowany na wyjŇõciu bramki AND IC17a (PHASE). Linie PULSE i PHASE sńÖ doprowadzone do dzielnik√≥w 2n IC3 oraz IC4.Obydwa dzielniki sńÖ tak samo skonfigurowane: przy pomocy S3 moŇľna ustawińá staŇāńÖ dzielnika na 29...214 (512...16384). Na linii CYCLE znajduje sińô na staŇāe sygnaŇā o czńôstotliwoŇõci od 366 do 11720 Hz. Z tńÖ samńÖ czńôstotliwoŇõcińÖ liczy takŇľe licznik (rys.2) wyŇõwietlacze LED. W przypadku licznika chodzi o kombinacjńô dw√≥ch przeksztaŇātnik√≥w - z sygnaŇāu szeregowego na kod BCD, a nastńôpnie z kodu BCD na kod 7- segmentowego wyŇõwietlacza LED. WaŇľne jest to, Ňľe impuls na linii LATCH przepisuje dane z wejŇõńá na wyjŇõcia i odpowiednie wartoŇõci sńÖ dostńôpne na wyŇõwietlaczu aŇľ do nastńôpnego impulsu LATCH.
Impulsy CYCLE docierajńÖ do kolejnego dzielnika (IC24), kt√≥ry jest tak wŇāńÖczony na bramkńô AND ,Ňľe wejŇõcie SET przerzutnika IC23a jest uaktywnione co 3600 impuls√≥w. TuŇľ za przerzutnikiem jest umieszczony licznik dekadowy IC26, kt√≥rego wejŇõcie taktujńÖce jest podŇāńÖczone bezpoŇõrednio do linii PULSE. Licznik ten inicjuje peŇānńÖ i dosyńá skomplikowanńÖ procedurńô RESET. WyjŇõcia Q0...Q9 sńÖ wŇāńÖczane kolejno po sobie, w taki spos√≥b, Ňľe najpierw wŇāńÖcza sińô Q1 , potem Q4, Q6 i na koŇĄcu Q8 i Q9 wysyŇāajńÖ impulsy taktujńÖce. Najpierw wińôc wysyŇāany jest impuls LATCH (Q1) i na wyŇõwietlaczu pojawia sińô aktualny wynik. Wkr√≥tce potem wysyŇāane sńÖ dwa impulsy (Q4 i Q6) do jeszcze nie om√≥wionego ukŇāadu sygnalizacji bŇāńôd√≥w. Po tym, jak zostaŇāy zapamińôtane wszystkie waŇľne informacje dotyczńÖce pomiaru, moŇľe zostańá wykonany RESET pozostaŇāej czńôŇõci ukŇāadu. W dalszej kolejnoŇõci impuls Q8 wykonuje RESET przerzutnika IC23a.
WyjŇõcie Q tego przerzutnika generuje impuls RESET dla prawie caŇāej reszty ukŇāadu. Do tej linii sńÖ podŇāńÖczone IC13b, obydwa dzielniki 2n, kompletna jednostka zliczajńÖco - dekodujńÖca dla wyŇõwietlacza , dzielnik CYCLE / 3600 oraz sygnalizacja bŇāńôd√≥w. Bramka IC17b zapewnia, Ňľe po zresetowaniu caŇāego ukŇāadu impuls RESET dotrze takŇľe z powrotem do przerzutnika IC23a. Podobnie ma sińô rzecz z przerzutnikiem IC23b. W pozycji poczńÖtkowej S=R=0. Najpierw do przekaŇļnika dociera impuls z IC24 (CYCLE / 3600) albo z wyjŇõcia zanegowanego ukŇāadu IC15b. Na wyjŇõciu zanegowanym pojawia sińô 0. Nawet gdy na wejŇõciu S pojawi sińô 0 to na wyjŇõciu zanegowanym bńôdzie nadal 0. Dopiero wtedy, gdy pojawi sińô impuls Q9 z ukŇāadu IC26, na wyjŇõciu zanegowanym pojawi sińô 1 i stan ten pozostanie aŇľ do nastńôpnego impulsu SET. Od tego momentu caŇāy ukŇāad jest gotowy do kolejnego pomiaru.
Jak byŇāo to juŇľ wczeŇõniej rozwaŇľane, ostatni okres pomiarowy nie jest waŇľny. Z tego wzglńôdu maksymalny bŇāńÖd pomiarowy jest uzaleŇľniony od iloŇõci okres√≥w pomiarowych. Im wińôcej okres√≥w zliczy peŇāny pomiar, tym dokŇāadniejszy jest wynik. WskaŇļnik bŇāńôd√≥w , skŇāadajńÖcy sińô z IC18...IC22, tranzystor√≥w T1...T4 oraz LED√≥w D1...D4, pokazuje maksymalny bŇāńÖd pomiaru. Punktem wyjŇõciowym jest dodatnie przejŇõcie przez zero sygnaŇāu wejŇõciowego A, kt√≥ry taktuje licznik IC18. Cztery bramki AND sńÖ tak poŇāńÖczone, Ňľe odpowiednio przy 36,90,180 i 360 okresach na odpowiednim wejŇõciu S pamińôci poŇõredniej IC21 pojawia sińô 1.Na odpowiednim wyjŇõciu pojawia sińô wtedy takŇľe 1 i wysterowana zostaje kolejna pamińôńá poŇõrednia IC22, do kt√≥rej sńÖ wreszcie podŇāńÖczone odpowiednio tranzystory i diody LED. UkŇāad ten taktowany jest bezpoŇõrednio, albo poŇõrednio przez IC26. Najpierw IC18 zlicza do 180 . Przez IC19a impuls dociera do S0 w ukŇāadzie IC21 i ze wzglńôdu na „przeŇļroczystoŇõńá” pamińôci, dalej do D2 w IC22. Stan ten pozostaje na razie stabilny, pomimo tego, Ňľe IC18 moŇľe liczyńá dalej, poniewaŇľ wejŇõcia R nie sńÖ uaktywnione. W chwili gdy pojawi sińô impuls Q4 z ukŇāadu IC26, nastńôpuje zapisanie informacji wejŇõciowej i przekazanie jej dalej do stopnia z diodami LED. Pierwszy zatrzask moŇľe zostańá teraz zresetowany impulsem Q6, a informacja na wyŇõwietlaczu jest zachowana. Ostatecznie gŇā√≥wny RESET dokonuje wyzerowania licznika IC18. ZaleŇľnie od iloŇõci zliczonych okres√≥w Ňõwieci jedna lub wińôcej diod LED, odpowiednio do bŇāńôd√≥w pomiar√≥w 0,5¬į ; 1¬į ;2¬į ;5¬į. ObowińÖzujńÖcy jest oczywiŇõcie najniŇľszy sygnalizowany bŇāńÖd pomiaru.
Badania laboratoryjne.
Oscylogramy.
Podczas badaŇĄ laboratoryjnych na wejŇõcie kanaŇāu A miernika fazy podawaliŇõmy sygnaŇā o napińôciu UWE = 2V i czńôstotliwoŇõci fWE = 125 Hz. Natomiast na drugie wejŇõcie miernika , czyli na kanaŇā B podawaliŇõmy sygnaŇā przesunińôty w fazie w stosunku do sygnaŇāu podawanego na kanaŇā A. CzńôstotliwoŇõńá sygnaŇāu podawanego na kanaŇā B byŇāa taka sama jak czńôstotliwoŇõńá sygnaŇāu podawanego na kanaŇā A. Inna natomiast byŇāa wartoŇõńá napińôcia wejŇõciowego sygnaŇāu podawanego na kanaŇā B, kt√≥ra wynosiŇāa 0,2V. PrzebadaliŇõmy poszczeg√≥lne bloki danego miernika i poszczeg√≥lne przebiegi sygnaŇā√≥w na tych blokach przedstawiamy w postaci oscylogram√≥w.
WejŇõcie A
WejŇõcie B
IC 1 - CA 3140 n√≥Ňľka 3 . SygnaŇā po stŇāumieniu.
IC 2 - CA 3140 n√≥Ňľka 3. SygnaŇā po stŇāumieniu.
IC 1 - CA 3140 n√≥Ňľka 3. SygnaŇā bez tŇāumienia.
IC 2 - CA 3140 n√≥Ňľka 3. SygnaŇā bez tŇāumienia.
IC 12 - LM 311 n√≥Ňľka 7.
IC 14 - LM 311 n√≥Ňľka 7.
IC 15 - 45 28 n√≥Ňľka 10
IC 15 - 4528 n√≥Ňľka 6.
IC 13 - 4027 n√≥Ňľka 2.
IC 13 - 4027 n√≥Ňľka 15.
IC 16 - 4070 n√≥Ňľka 3.
IC 16 - 4020 n√≥Ňľka 4. Gdy na n√≥Ňľce 5 jest „1”
IC 16 - 4070 n√≥Ňľka 4. Gdy na n√≥Ňľce 5 jest „0”.
IC 16 - 4070 n√≥Ňľka 11.
IC 17 - 4081 n√≥Ňľka 3 PrzeŇāńÖcznik S4 w pozycji LEAD.
IC 17 - 4081 n√≥Ňľka 3. PrzeŇāńÖcznik S4 w pozycji LAG.
IC 4 - 4020 n√≥Ňľka 3.
IC 4 - 4020 n√≥Ňľka 2.
IC 4 - 4020 n√≥Ňľka 1.
IC 4 - 4020 n√≥Ňľka 15.
IC 4 - 4020 n√≥Ňľka 14
IC 4 - 4020 n√≥Ňľka 12.
IC 24 - 4040 n√≥Ňľka 10.
IC 24 - 4040 n√≥Ňľka 3.
IC 24 - 4040 n√≥Ňľka 14.
IC 24 - 4040 n√≥Ňľka 15.
IC 24 - 4040 n√≥Ňľka 1.
IC 26 - 4017 n√≥Ňľka 2.
IC 26 - 4017 n√≥Ňľka 15.
IC 26 - 4017 n√≥Ňľka 10.
IC 26 - 4017 n√≥Ňľka 11.
IC 26 - 4017 n√≥Ňľka 5.
IC 26 - 4017 n√≥Ňľka 9
IC 18 - 4040 n√≥Ňľka 10.
IC 18 - 4040 n√≥Ňľka 6.
IC 18 - 4040 n√≥Ňľka 3.
IC 20 - 4082 n√≥Ňľka 1.
b)Wyznaczanie szybkoŇõci ukŇāad√≥w.
f = 100 kHz
IC 12 - LM 311
SzybkoŇõńá tego ukŇāadu wynosi 4őľs .
IC 14 - LM 311
SzybkoŇõńá tego ukŇāadu wynosi 4,5őľs.
Wyznaczanie czasu propagacji przerzutnika JK.
Czas propagacji przerzutnika JK wyni√≥sŇā 50 őľs.
UkŇāad do wyznaczania wńôzŇā√≥w i strzaŇāek w fali akustycznej.
WńôzŇāy i strzaŇāki w fali akustycznej bńôdńÖ wystńôpowaŇāy wtedy gdy nastńÖpi naŇāoŇľenie dw√≥ch sygnaŇā√≥w akustycznych. Zjawisko to wystńôpuje podczas dyfrakcji (ugińôcia) i interferencji (nakŇāadania) fali akustycznej.
Schemat do wyznaczania wńôzŇā√≥w i strzaŇāek.
Do wyznaczania wńôzŇā√≥w i strzaŇāek moŇľe sŇāuŇľyńá mikrofon pojemnoŇõciowy do kt√≥rego dociera sygnaŇā akustyczny z gŇāoŇõnika. SygnaŇā z mikrofonu doprowadzony jest do jednego z wejŇõńá miernika fazy, natomiast do drugiego wejŇõcia doprowadzony jest sygnaŇā z generatora. Gdy odczytamy z miernika, Ňľe przesunińôcie fazowe wynosi 180¬į, to oznacza to, Ňľe w miejscu w kt√≥rym znajduje sińô mikrofon wystńôpuje strzaŇāka (czyli w miejscu tym sygnaŇā jest wzmocniony). Odwrotnym przypadkiem jest sytuacja gdy na ekranie miernika pojawi sińô przesunińôcie fazowe wynoszńÖce 0¬į. W√≥wczas mamy do czynienia z wńôzŇāem czyli w miejscu w kt√≥rym znajduje sińô mikrofon sygnaŇā akustyczny jest stŇāumiony.
Wnioski.
Zbudowany przez nas miernik przesunińôcia fazowego Ňāatwo, szybko i precyzyjnie pozwala okreŇõlińá relacje fazowe pomińôdzy dwoma sygnaŇāami maŇāej czńôstotliwoŇõci. Ponadto w bardzo dobrym stopniu odpowiada wszystkim zaŇāoŇľeniom stawianym tego typu urzńÖdzeniom. Zbudowany jest poza tym z nie drogich i Ňāatwo dostńôpnych specjalnych podzespoŇā√≥w, kt√≥re moŇľna zdobyńá w wińôkszoŇõci sklep√≥w. NastńôpnńÖ zaletńÖ wykonanego przez nas miernika jest to , Ňľe mierzona przez niego relacja fazowa pomińôdzy dwoma sygnaŇāami jest odczytywana w stopniach i wyŇõwietlana na wyŇõwietlaczu . WaŇľnńÖ jego zaletńÖ jest r√≥wnieŇľ maŇāy bŇāńÖd pomiarowy kt√≥ry w optymalnych warunkach wynosi ¬Ī 0,5 ¬į, co jest bardzo dobrym osińÖgnińôciem.
Podczas badaŇĄ laboratoryjnych wyŇľej wymieniony miernik zachowywaŇā sińô poprawnie i mierzyŇā badane przez nas relacje fazowe z oczekiwanńÖ dokŇāadnoŇõcińÖ. R√≥wnieŇľ przebiegi fazowe sygnaŇā√≥w na poszczeg√≥lnych blokach miernika byŇāy w duŇľym stopniu zbliŇľone swymi ksztaŇātami do idealnych, co Ňõwiadczy o dobrej klasie tego miernika.
PodsumowujńÖc wykonany przez nas miernik jest urzńÖdzeniem szybkim, dokŇāadnym i prostym w obsŇāudze co pozwala na uŇľytkowanie go nawet przez maŇāo zaawansowanych elektronik√≥w.
1
- 2 -
Wyszukiwarka
Podobne podstrony:
MIERNICTWO CYFROWE, Miernictwo Cyfrowe
Cyfrowy miernik pojemnoŇõci 0 20uF
Cyfrowy miernik poziomu dŇļwińôku typu SL, Elektrotechnika-materiaŇāy do szkoŇāy, Pomiary elektryczne wi
B - oscyloskop, Oscyloskop cyfrowy, Miernictwo elektroniczne - laboratorium
NO4 MULTIMETR CYFROWY, MIERNIK4, WYDZIAňô ELEKTRONIKI
cyfrowy miernik mocy
J 118 Cyfrowy Miernik WilgotnoŇõci powietrza
Analogowo cyfrowy miernik pojemnoŇõci
Analagowo cyfrowy miernik czńôstotliwoŇõci
Lab miernictw lektryczne LME miernik cyfrowy
Miernictwo cyfrowe 1
POLITECHNIKA ŇĹWI¬¶TOKRZYSKA, Miernictwo Cyfrowe
,miernictwo L,PRZETWORNIKI CYFROWO ‚ÄďANALOGOWE POMIARY, WŇĀAŇöCIWOŇöCI, ZASTOSOWANIA sprawozdanie
Miernictwo cyfrowe1 1, Materialy na uczelnie
Miernictwo- Przetwornik analogowo-cyfrowy kompensacyjny, 15 grudnia, 1995
Miernictwo- Pomiar wsp√≥Ňāczynnika tŇāumienia zakŇā√≥ceŇĄ woltomierza cyfrowego, data_
Pomiar napińôcia za pomocńÖ miernik√≥w analogowych ( woltomierz i amperomierz ) oraz cyfrowych (ampe
wińôcej podobnych podstron