Postać ostateczna transmitancji obiektu:
Postacie transmitancji podrzędnych wynikają z poniższego wzoru.
Macierz transmitancji.
- wymuszeniowa: prądowa GI U = I(s) / U(s) - zakłóceniowa: prądowa GI M = I(s) / M(s)
prędkość. GωU = ω(s) / U(s) prędkość. GωM = ω(s) / M(s)
4.Postacie numeryczne.
Dane : R = 0,8Ω L = 0,04 H n N =1100 obr / min IN = 100 A UN =220V J = 2,5kgm2
Z tych danych można policzyć k.
K = (UN -INR) / ωN ...(14)
ωN = 2*π*f
f=1100 obr / 60 sek
f=18,33..(3) Hz
Można przyjąć, że f =18,33 Hz, więc ωN = 115 s-1
Po podstawieniu do (14) K=1,22 [V*s]
oraz Mn=K*I =122[V*s*A]
a)
b)
c) Wyznaczenie G(s) na podstawie matlaba.
Korzystam z funkcji [N,E]=ss2tf(A,B,C,D,iu), gdzie iu to numer wejścia, A, B, C ,D macierze stanu, macierz E zawiera współczynniki mianownika, macierz N zawiera współczynniki licznika.
Postać programu:
A=[-30.5,-20;0,0.49]
B=[25,0;0,-0.4]
C=[1,0;0,1]
D=[0,0;0,0]
[N1,E1]=ss2tf(A,B,C,D,1)
[N2,E2]=ss2tf(A,B,C,D,2)
***********************
GI U = 0
GI M = (0s2 + 0.4000s-12.2000)/(1s2+30.0100s -14.9450)
GωU = (0s2 + 25s-12.2500) /(1s2 + 30.0100s -14.9450)
GωM = (0s2 + 0s -+8) / (1s2 + 30.0100s -14.9450)
Widać, że te wyniki policzone prez Matlaba są identyczne jak policzone ręcznie.
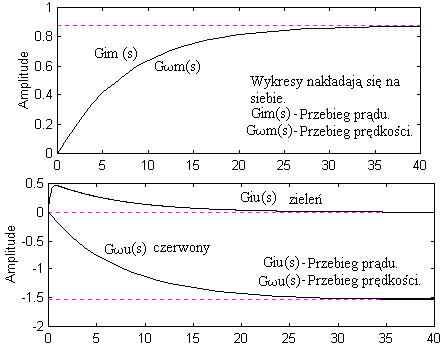
5. Odpowiedź układu na skok jednostkowy na podstawie matlaba.
Polecenie step(A,B,C,D) umożliwia wygenerowanie odpowiedzi układu na skok jednostkowy.
6. Wykresy w jedym oknie:
W pierwszym oknie jest odpowiedź na M(s) =s-1 czyli przebiegi GI U GωU.
W drugim oknie jest odpowiedź na U(s) = s-1 czyli przebiegi GIM GωM.
2
Wyszukiwarka
Podobne podstrony:
GbpUsd analysis for July 06 Part 1
~$Production Of Speech Part 2
20 H16 POST TRANSFUSION COMPLICATIONS KD 1st part PL
67 Sposoby obliczania sił kształtowania plastycznego ppt
Discussions A Z Intermediate handout part 1
Dywizjony Polskich Sił Powietrznych na Zachodzie 1940 1946 306 Dywizjon Myśliwski
I9M1S1 Nawrot Gudanowicz lab2
IWP JP2 Lab2 Struktury
Lab2 OZE id 259328 Nieznany
part 20
cwicz mechanika budowli obliczanie ukladow statycznie niewyznaczalnych metoda sil krata
Eurocode 3 Part 1 11 Pren 1993 1 11 (Eng)
Part 2
lrm sprawozdanie kck lab2
C102723 D W0064 CIR PART
LAB 4 Lab2 WprowadzenieMATLAB 2 Nieznany
więcej podobnych podstron