Podstawy automatyki i robotyki
Ćwiczenie 6: Badanie regulacji temperatury
Data wykonania ćwiczenia: 19.11.2009r
Data oddania sprawozdania: 26.11.2009r
Wykonujący ćwiczenie:
Gorczewska Agnieszka
Jesionek Katarzyna
Biczkowski Karol
Zad. 1. Zdefiniuj i zapisz parametry modelu pieca przyjmując wartość mocy grzanej P=1.25W:
k - współczynnik mający charakter czułości statycznej [K/W]
![]()
- termiczna stała czasowa [s]
![]()
0 - czas martwy, opóźnienie odpowiedzi [s]
W ćwiczeniu parametry dynamiczne wynoszą:
a) dla nagrzewania
![]()
b) dla chłodzenia
![]()
Zad. 2. Na podstawie zarejestrowanego wykresu przebiegu temperatury podczas procesu nagrzewania i chłodzenia modelu pieca wyznacz wartości stałych czasowych ![]()
0, ![]()
W ćwiczeniu ![]()
0, ![]()
wyszło odpowiednio:
a) dla nagrzewania :
![]()
0 = 0 [s]
![]()
= 201 [s]
b) dla chłodzenia:
![]()
0 = 400 [s]
![]()
= 190 [s]
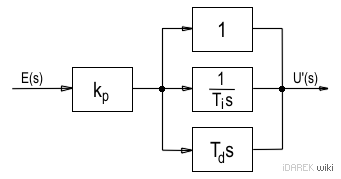
Zad 3. Zdefiniuj parametry i zapisz postać transmitancji operatorowej regulatora PID .
Naszkicuj jego charakterystyki częstotliwościowe: amplitudową i fazową.
Procesy cieplne opisane są równaniem różniczkowym pierwszego stopnia, dlatego też najprostszy model dynamiczny odpowiada członowi inercyjnemu o transmitancji:
G(s) = ![]()
Gdzie:
k - współczynnik mający charakter czułości statycznej [K/W]
![]()
- termiczna stała czasowa [s]
Odzwierciedleniem zjawisk zachodzących w obiektach termicznych jest opisane obiektu za pomocą transmitancji o postaci:
G(s) = ![]()
exp (-s![]()
0)
Gdzie:
k - współczynnik mający charakter czułości statycznej [K/W]
![]()
- termiczna stała czasowa [s]
![]()
0 - czas martwy, opóźnienie odpowiedzi [s]
![]()
PID- rzeczywisty
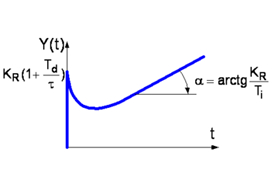
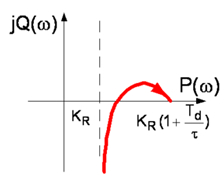
Odpowiedź na skok jednostkowy Charakterystyka amplitudowo - fazowa
Zad. 4. Skomentuj otrzymane wyniki
Wykres do tab1- - Pomiar właściwości dynamicznych laboratoryjnego modelu pieca
Zaobserwowana charakterystyka informuje o procesie nagrzewania układu regulacji, a także jego chłodzenia.
Wykres do tab2 - Badanie regulacji dwustanowej
Na charakterystyce dobrze widoczna jest natychmiastowa odpowiedź na załączenie układu. Szybkie dojście i przekroczenie wartości zadanej - przekroczenie jest związane z bezwładnością temperaturową elementu grzewczego. Proces ochładzania dochodzi do wartości poniżej zadanej. Regulatory są w stanie utrzymać daną wielkość fizyczną w danym zakresie z pewnym „wahaniem”, im mniejsze owe „wahanie”, tym precyzyjniej jest układ regulowany. Chłodzenie, a następnie grzanie po pierwszym cyklu, jest załączane cyklicznie, co dobrze widać na wykresie z oscyloskopu.
Wykres do tab3 - Badanie regulacji temperatury regulatorem PID bez zmiany ustawień fabrycznych jego nastaw.
Z charakterystyki regulacji odczytanej z oscyloskopu można wnioskować, że układ jest rozregulowany.
Wykres do tab6- Badanie regulacji regulatorem PID z nastawieniami dobranymi metodą „autotunning”.
Zadanie zostało wykonane częściowo, ze względu na ograniczony czas wykonywania ćwiczenia. Z zaobserwowanej charakterystyki można wywnioskować, że regulator PID w owej nastawie dąży do ustawień wartości P,I,D, po przez badanie zachowań układu na podane wartości do uzyskania charakterystyki zbliżonej do charakterystyki idealnej regulatora PID.
Grupa Dziekańska 1 Gdańsk, 19.11.2009r
Inżynieria Biomedyczna
1
Wyszukiwarka
Podobne podstrony:
3702
200407 3702
3702
3702
3702
FG Update Service Pro EN 1232 3702 3
więcej podobnych podstron