Wyższa Szkoła Inżynierska
Instytut Elektroniki
Bogdan Markowski , Marcin Woźniak
Paweł Zięba
Laboratorium z miernictwa elektronicznego
Ćwiczenie 4
Pomiary częstotliwości, okresu i fazy metodami cyfrowymi
Wstęp teoretyczny
Czasomierz cyfrowy
Mierzony przedział czasu jest określany za pomocą stromych zboczy opadających doprowadzonych do układu sterowania bramki SB. Układ ten wysterowuje bramkę i powoduje jej przewodzenie w czasie mierzonym tx,jaki upływa od sygnału startowego doprowadzonego do wejścia WE1, do sygnału końcowego STOP na wejściu WE0. W czasie mierzonym (czasie przewodzenia bramki) do licznika dochodzi N impulsów (zboczy opadających) przy czym .
Częstotliwość wzorcową dobiera się za pomocą dzielnika częstotliwości D w taki sposób, aby liczba N była możliwie duża, ale nie przekroczyła pojemności licznika Nmax: , przy czym N to liczba odczytana na podziałce cyfrowej miernika, fw - wybrana częstotliwość wzorcowa lub Tw - wybrany okres wzorcowy.
Błąd pomiaru składa się z błędu dyskretyzacji, błędu niestabilności generatora wzorcowego oraz błędu wynikającego z opóźnień zadziałąnia bramki.
Cyfrowy miernik częstotliwości
Składa się z tych samych podzespołów co miernik czasu, ale połączonych w odmienny sposób.
Nowym podzespołem jest układ formując F, który napięcie wejściowe, okresowo zmienne, dowolnego kształtu, o częstotliwości mierzonej fx, przekształca w przebieg prostokątny o tej samej częstotliwości. Napięcie prostokątne dochodzi do licznika L przez bramkę B, która przewodzi w czasie wzorcowym Tw, określonym za pomocą generatora Gw i dzielnika D. W czasie przewodzenia bramki do licznika dochodzi N zboczy opadających napięcia N=fxTw.
W tym przypadku czas Tw dobiera się za pomocą dzielnika w ten spsób, aby liczba N była możliwie duża, ale mniejsza niż Nmax.
Mierzona częstotliwość wyraża się wzorem: .
Przy pomiarze małych częstotliwości, aby zmniejszyć błąd dyskretyzacji konieczne jest stosowanie dużych czasów przewodzenia bramki Tw.
Cyfrowy miernik przesunięcia fazowego
Fazomierz cyfrowy służy do dokładnych pomiarów przesunięcia fazowego dwóch napięć o jednakowej częstotliwości.
Schemat blokowy:
Napięcia wejściowe U1 i U2 (po odpowiednim wzmocnieniu lub ograniczeniu w nie narysowanych układach wejściowych) do prowadza się do komparatorów Ko1 i Ko2, które dają na wyjściach opadajace zbocze sygnału, w chwilach przejścia napięć przez zero od wartości dodatniej do ujemnej. Sygnał otwierający bramkę (START) powstaje w chwili przejścia przez zero napięcia odniesienia U1 o fazie podstawowej =0, a sygnał zamykający (STOP) powstaje w chwili przejścia przez zero napięcia U2 o fazie mierzonej x. Zatem czas przewodzenia bramki T jest proporcjonalny do przesunięcia faz obu napięć. W czasie T licznik miernika jest napełniany impulsami o częstotliwości kfwe wytworzonej w powielaczu częstotliwości PCz.
Liczba impulsów zliczonych: , przy czym: k - mnożnik powielacza częstotliwości, fwe - częstotliwość napięć wejściowych, Twe - okres napięć wejściowych
Ponieważ przesunięcie fazowe napięć wynosi , zatem po przekształceniach . Aby liczba N wskazana na polu odczytowym miernika była miarą przesunięcia fazowego w radianach, mnożnik k powielacza musi wynosić dziesiętną wielokrotność liczby 2. Wówczas
=10nN a czynnik 10n uwzględnia się przez wyświetlenie przecinka dziesiętnego. Aby wskazania były w mierze kątowej mnożnik k musi stanowić wielokrotność dziesiętną liczby 360. Wówczas .
Pomiary
Określenie minimalnej wartości amplitudy sygnału wejściowego Uwe niezbędnej do prawidłowej pracy częstościomierza-czasomierza dla różnych kształtów sygnałów wejściowych.
Badanym miernikiem jest częstościomierz - czasomierz typu PFL-28A. Częstotliwość sygnałów wejściowych wynosi 10.9kHz.
Dla sygnału sinusoidalnego: dla Uwe<27mV wskazanie zerowe
dla Uwe=27mV 5kHz
dla Uwe>28mV 10.9kHz
Dla sygnału trójkątnego: dla Uwe<25mV wskazanie zerowe
dla Uwe>=26mV 10.9kHz
Dla sygnału prostokątnego: dla Uwe<25mV wskazanie zerowe
dla Uwe>=25mV 10.9kHz
Pomiar częstotliwości metodą cyfrową
Uwe=1V
Do generacji przebiegu użyliśmy generatora o częstotliwości maksymalnej równej 12MHz.
Dla porównania częstotliwości mierzonych przez częstościomierz przebiegów wykorzystaliśmy oscyloskop na którym dla wyeliminowania błędów ustalaliśmy przebieg o okresie równym wielokrotności działek. Staraliśmy się aby na ekranie oscyloskopu umieścić tylko jeden okres badanego przebiegu dla lepszej dokładności pomiaru. Umożliwiło to określenie szukanej częstotliwości z dokładnością do grubości kreślonej lini, grubości siatki na lampie oscyloskopowej. Dalsze błędy pomiaru wynikające z przetwarzania w oscyloskopie badanego sygnału uznaliśmy, że można pominąć na tle wyżej wymienionych niedokładności. Widać więc, że był to raczej pomiar przybliżony a nie wzorcowy. Ze względu na brak częstościomierza wzorcowego nie byliśmy w stanie określić dokładnie mierzonej częstotliwości i określić błędów popełnianych przy pomiarze badanym miernikiem.
Tabela wyników
Pomiar oscyloskopem |
1Hz |
5Hz |
7Hz |
10Hz |
20Hz |
30Hz |
40Hz |
50Hz |
100 Hz |
200 Hz |
250 Hz |
500 Hz |
pomiar miernikiem |
2Hz |
5Hz |
8Hz |
13Hz |
22Hz |
33Hz |
42Hz |
51Hz |
101 Hz |
207 Hz |
253 Hz |
504 Hz |
Pomiar oscyloskopem |
1kHz |
2.5 kHz |
5kHz |
10 kHz |
25 kHz |
50 kHz |
100 kHz |
500 kHz |
1 MHz |
5 MHz |
12 MHz |
|
pomiar miernikiem |
1010 kHz |
2490 kHz |
4985 kHz |
9885 kHz |
24.82 kHz |
49.84 kHz |
110.5 kHz |
507.8 kHz |
1.269 MHz |
5.51 MHz |
12.8 MHz |
|
Jak widać, błędy grube występują przede wszystkim dla częstotliwości bardzo niskich rzedu 1Hz i dla częstotliwości powyżej 10MHz gdyż pomiarów dokonywaliśmy używając wejścia B dla którego zakres pomiarowy wynosi od 1Hz do 10MHz. Przeprowadzone pomiary potwierdziły więc dane techniczne zamieszczone w instukcji załączonej do częstościomierza.
Ze względu na brak przystawki mieszającej (obniżającej częstotliwość) nie mogliśmy wykonać pomiarów bardzo wysokich częstotliwości metodą interferancyjną.
Pomiar przesunięcia fazowego z wykorzystaniem częstościomierza cyfrowego
Schemat układu pomiarowego
Pomiar przesunięcia fazowego polega na pomiarze czasu w momentach pokazanych na rysunku
a następnie obliczeniu z następującego wzoru przesunięcia fazowego:.
Badany układ różniczkujący składał się z następujących elementów:
R=1kΩ
C=33nF
Transmitancję badanego układu można zapisać w następujący sposób:
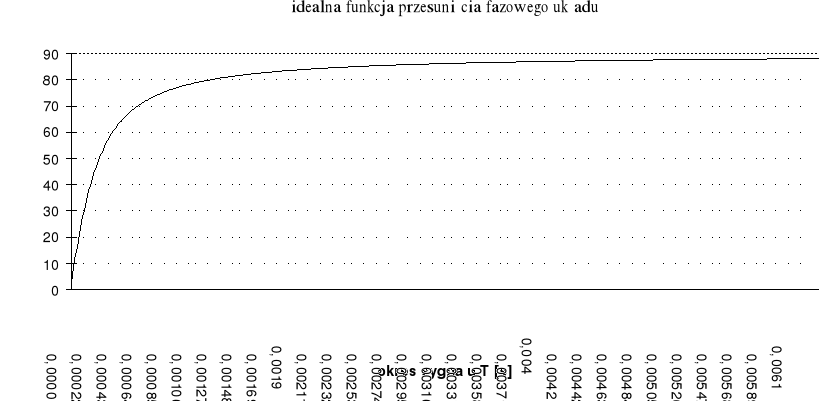
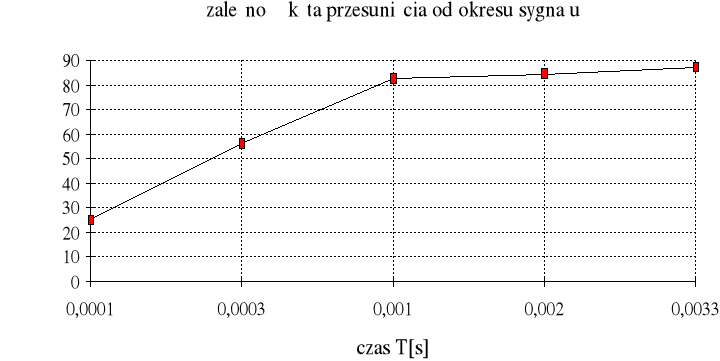
W tabeli pomiarowej zamieściliśmy wyniki pomiaru pośredniego przesunięcia fazowego wprowadzonego przez układ i dla porównania wyniki obliczenia tego przesunięcia dla danego okresu sygnału ze wzoru wyprowadzonego dla układu idealnego.
DT[s] |
0.0008 |
0.00047 |
0.00023 |
0.000047 |
7.00E-06 |
T[s] |
0.0033 |
0.002 |
0.001 |
0.0003 |
0.0001 |
Dj=DT/T*360 |
87.27273 |
84.6 |
82.8 |
56.4 |
25.2 |
arctan(T/(2*p*C*R)) |
86.40473 |
84.08114 |
78.28599 |
55.3497 |
25.74744 |
Uwagi i wnioski
ćwiczenie przebiegało bez większych zakłóceń. Przygotowanie sprawozdania tym razem również też.
Badany miernikiem był PFL-28A. Pomiarów dokonywaliśmy doprowadzając sygnał do wejścia B dla którego zakres pomiarowy jest następujący: 1Hz - 10MHz. Odpowiadają temu następujące czasy otwarcia bramki: od 1s dla zakresu 10MHz do 10s dla zakresu 1Hz. Przy pomiarze częstotliwości stosuje się stosunkowo duże czasy przewodzenia (otwarcia bramki), zatem błąd bramkowania jest stosunkowo mały i wynika głównie z błędu dyskretyzacji. Przy pomiarze małych częstotliwości, aby zmniejszyć błąd dyskretyzacji konieczne jest stosowanie dużych czasów przewodzenia bramki. Zastosowanie dużego czasu przewodzenia bramki jest jednak bardzo niedogodne, opóźnia otrzymanie wyniku oraz uniemożliwia pomiary i ewentualny zapis wartości zmieniających się w czasie. Dlatego podczas laboratoryjnych pomiarów małej częstotliwości stosuje się metodę pośrednią, obliczając wartość częstotliwości na podstawie bezpośredniego pomiaru okresu lub wielokrotności okresu.
Z przeprowadzonych pomiarów wynika również, że poprawność przeprowadzanych pomiarów zależy w dużym stopniu od amplitudy sygnału, którego częstotliwość chcemy zmierzyć. Istnieją określone wartości minimalne amplitudy tych sygnałów, które zmierzyliśmy. Stwierdziliśmy że minimalna wartość tej amplitudy nie zależy znacząco od częstotliwości badanego sygnału ale zależy od jego kształtu. Stwierdziliśmy, że dla sygnału sinusoidalnego wartość tej amplitudy jest największa a dla sygnału prostokątnego najmniejsza. Jest to wynikiem tego, że w każdym cyfrowym mierniku częstotliwości istnieje układ formujący ( dyskryminator amplitudy, przerzutnik Schmitta), przekształcający napięcie periodyczne o dowolnym kształcie na napięcie prostokątne o takiej samej częstotliwości. Takie przekształcenie jest często konieczne ze względu na to iż układy cyfrowe pracują poprawnie tylko przy stromych zboczach sygnału (np. co najmniej 1V/s). Dla przykładu zamieścimy układ formujący i przebiegi, które wyjaśniają to przekształcenie.
Jeśli napięcie wejściowe, wzrastające przekroczy pewną wartość (napięcia zadziałania Uza), układ gwałtownie przechodzi w stan jeden, a napięcie wyjściowe przyjmuje poziom wysoki H. Stan ten trwa tak długo, aż napięcie wejściowe nie spadnie poniżej wartości napięcie powrotu Upw.
Z pomiarów przesunięcia fazowego wprowadzanego przez układ różniczkujący wynika, że badana metoda pomiarowa (przy użyciu miernika odstępu czasu) jest poprawna i pozwala na uzyskanie wyników, które w znacznym stopniu pokrywają się z wartościami wyliczonymi teoretycznie. Świadczą o tym charakterystyki
=f(Ts) - dla teorii i =f(Ts) - dla pomiarów (Ts - okres mierzonych sygnałów), które wykazują znaczne podobieństwo.
Wyszukiwarka
Podobne podstrony:
MIERNIK ELEKTRODYNAMICZNY, Studia, Metrologia
działanie mierników elektrycznych?
Pos ugiwanie si miernikami elektrycznymi
Sprawozdanie 1 Miernictwo Elektryczne
Posługiwanie się miernikami, Elektrotechnika, Instrukcje I
TechInf, Materiały PWR elektryczny, semestr 3, METROLOGIA (miernictwo elektroniczne i fotoniczne), s
praca kontrolna z miernictwa elektrycznego ESMKWPQWTQD7R2IQDIU2PCU6VKJW45W737QCQII
Laboratorium z podstaw Miernictwa Elektronicznego4
errata podstawy miernictwa elektrycznego, UR Elektrotechnika, Ściągi
MIERNICTWO ELEKTRONICZNE sem, ElektronikaITelekomunikacjaWAT, Semestr 1, Miernictwo Elektroniczn
MIERNI~1, LABORATORIUM MIERNICTWA ELEKTRYCZNEGO
04 - Przetworniki c-a, miernictwo-Šw.2, Laboratorium Miernictwa Elektronicznego
uklady czasowe, Laboratorium Miernictwa Elektrycznego
04 - Przetworniki c-a, Cw2miern2 - Piotrek, Laboratorium Miernictwa Elektronicznego
wyklad 01 - bledy, MIERNICTWO ELEKTRONICZNE
Wyznaczanie błędów dodatkowych mierników elektromagnet
Eletrotechnika Mierniki elektromagnetyczne
Ujemne sprzężenia zwrotne, Ujemne sprzężenia zwrotne, Laboratorium Miernictwa Elektrycznego
więcej podobnych podstron