1.równanie naturalne klotoidy rys
LR=a2 F=mV2/R, k=1/R, F=mV2k, Q=mg, tgα=h/b, tgα=F/Q, h/b= F/Q, h=(bmV2k)/mg=b(V2k/g)
Wartość przechyłki h wyprowadza się stopniowo:
h=iL, (bV2k)/g=iL, L=(bV2/gi)k, gdzie bV2/gi=a2 , LR=a2
L-dł. klotoidy mierzona od punktu styczności osi drogi z klotoidą R-promień krzywizny w końcu odcinka L, a2-współcz. proporcjonalności, Q-siła ciężkości, F-siła pociągowa skierowana wzdłuż kierunku jazdy, h-przechyłka
2. analiza dokł. tyczenia lokalizującego - podst. teoretyczne z uwzględnieniem i bez błędności p-któw nawiązania
Przedmiotem tyczenia lokalizującego jest określenie położenia względem osnowy realizacyjnej elementów projektowanego obiektuoraz oznaczenie ich w terenie w taki sposób aby wytyczane punkty mogły być wykorzystane po wykonaniu robót budowlano-motażowych.
Metoda biegunowa. Stabilizujemy w terenie dwa punkty A, B tworzące bazę i odkładając w terenie od tej osnowy dany kąt i odległość otrzymujemy punkt do wyniesienia. Na dokładność tyczenia mają wpływ:niedokładność osnowy, niedokł. wyzn. punktu osnowy, niedokł. czynności pomiarowych (centr. instrumentu 0,7(L/C)*e, odłożenie kąta:L(mα/ρ), odłożenie odległości:mL), niedokładność utrwalenia:
mog2=Σ4i=3mi2-uwzględnienie błędów osnowy
mwewn2=Σ4i=3mi2-wewn. błąd tyczenia
Analiza dokładności: mp=√(mx2+my2), Korzystając ze wzorów na wsp. punktu P Xp=XA+cosαd, Yp=YA+sinαd i różniczkując je otrzymujemy wzory na błąd położenia punktu P: mx2=[(δXp/δα)mα]2+[(δXp/δd)md]2,
my2=[(δYp/δα)mα]2+[(δYp/δd)md]2,
mx2=(-sinαd mα)2+(cosα md)2,
my2=(cosαd mα)2+(sinα md)2,
mp2= mα2d2+md2
Błąd długości:
dA-P=√ (XP-XA)2+(YP-YA)2
md2=(∂d/∂XP*mXP)2+(∂d/∂XA*mXA)2+(∂d/∂YP*mYP)2+(∂d/∂YA*mYA)2, gdzie:
∂d/∂XP=(XP-XA)/√[(XP-XA)2+(YP-YA)2 ]
∂d/∂XA=-(XP-XA)/√[(XP-XA)2+(YP-YA)2 ]
∂d/∂YP=(YP-YA)/√[(XP-XA)2+(YP- YA)2 ]
∂d/∂YA=-(YP-YA)/√[(XP-XA)2+(YP-YA)2 ]
Błąd kąta można wyzn. ze wzoru: mα/ρ=md/d
3. poszerzenie osi torów kolejowych
Dane: R≥V2, e-z proj.
L=AO2=√(O1O2)-(AO1)2; O1O2=2R; AO1=R+(R-e); L=√4R2-4R2+4Re-e2; L=√4Re-e2 RYS.
Punkt T3 ustala się na podst. miar podanych na projekcie, natomiast T1 znajdziemy przez odłożenie L wzdłuż toru 2. Pozostałe punkty znajdziemy w oparciu o α. Porównując równania: tgα=L/(2R-e), tgα=e/(L-2t)otrzymujemy t=(L2+e2)/4e, t=(L2+e2)/4e≈L/4
Punkty pośrednie otrzymamy ze wzoru:yi=xi2/2R, podstawiając za R≈L2/4e:yi=(2e/L2)xi2.
4. przemieszczenie bezwzględne budowli - podst. Teoretyczne
Przemieszczenie bezwzględne punktu-zmiana położenia punktu zaistniała w rozpatrywanym okresie czasu i wyrażona przez wektor przemieszczenia w stałym układzie odniesienia (układ współrzędnych, w którym wyrażone są przemieszczenia punktów i obiektów, wyznaczony przez zastabilizowane punkty sieci kontrolnej zidentyfikowane jako stałe)
Przemieszczenie obiektu-zmiana położenia obiektu, polegająca na przesunięciu albo na obrocie lub przesunięciu i obrocie, przy której wzajemne odległości wszystkich punktów odległości nie ulegają zmianie.
Pomiar przemieszczenia to prace projektowe, obliczeniowe, pomiarowe do określenia:wektora zmian położenia obserwowanych punktów reprezentujących badany obiekt.
Obserwacje wybranych punktów w ustalonych interwałach czasowych,
To-pomiar wyjściowy
Ta-pomiar aktualny
UP=UPT-UPφ+UPε
T-translacja, φ-skręt, ε-odkształcenie
Wyznaczenie przemieszczeń bezwzględnych:sieć punktów odniesienia założonych poza siecią oddziaływania obiektu na otoczenie
1)obiekt iżynierski
RYS
2)powierzchnia terenu
RYS
Przy dużej ilości punktów kontrolowanych umieszczonych na badanym obiekcie wygodniej jest oddzielnie wyznaczyć przemieszczenia punktów kontrolowanych i oddzielnie stanowisk obserwacyjnych. Postępowanie takie polega na wyodrębnieniu z całej sieci
a)sieć punktów odniesienia
b)konstrukcji wyznaczających X, Y punktów kontrolowanych a następnie:
1)wyzn. przemieszczeń stanowisk obserwacyjnych przy założeniu punktów odniesienia
2)obliczenie poprawek do aktualnych obserwacji (kierunki, kąty, boki) ze względu na przemieszczenia stanowisk obserwacyjnych
3)wyznaczenie składowych przemieszczeń punktów kontrolowanych na podstawie skorygowanych wartości obserwacji aktualnych i wyjściowych
5. badanie pionowości budowli wysokich - met. kątowa wzór, rys., metody opracowania wyników
Pomiar polega na wyznaczeniu kierunków stycznych (lewej KL i prawej KP) do obiektu w każdym z przekroju, z każdego stanowiska obserwacyjnego.
Średnia z każdej pary kierunków określa położenie osi budowli w poszczególnych przekrojach:
K=(Kl+KP)/2
Natomiast ΔKi=Ki-K1 jest różnicą między położeniem osi na poziomie i oraz na poziomie najniższym - najbliższym podstawie budowli ( przyjmowany za poziom zerowy) i pozwala z zależności ui=(ΔKi/ρ)d
d - odległość między stanowiskiem a osią obiektuobliczyć składowe wychylenia osi budowli od pionowości w kierunku prostopadłym do celowych z poszczególnych stanowisk obserwacyjnych
RYS
Liczba stanowisk od 2 do 5, najlepiej 3, a kąt między poszczególnymi stanowiskami a kierunkiem do osi obiektu 2Π/n, n - liczba stanowisk obserwacyjnych.
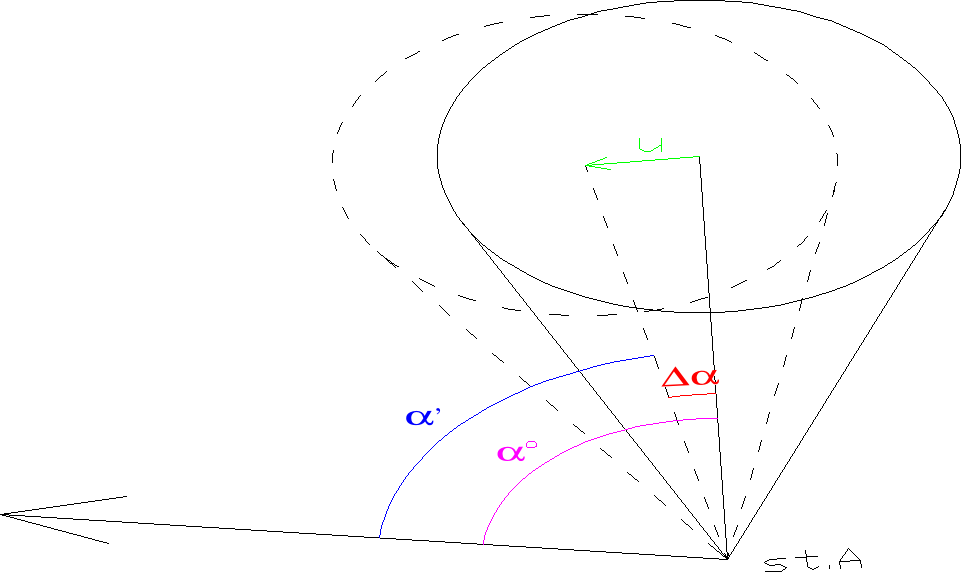
α0 - kąt miedzy kierunkiem nawiązania a osią obiektu tuż przy podstawie(poziom zerowy)
αi - kąt między kierunkiem nawiązania a osią budynku na danym poziomie
u=d(Δα/ρ'')=d((α0-αi)/ρ”)
mu2=(du/dd)2md2+(du/dα0)2mα02+(du/dαi)2mαi2
du/dd= Δα/ρ''
du/dα0=d/ ρ
du/dαi =- d/ ρ
mα= mα0= mαi
u=u√(md/d)2+2(mα/Δα)2
mu=u(mα/Δα) √2
(md/d)2 - jest bardzo małe i pomijamy
Wyszukiwarka
Podobne podstrony:
Egzamin Zestaw 1 ściąga
ZESTAWY SCIAGA, Z2, 1
pytana testowe PK3 2 AA, pytania łaczność, zestawy, ściąga z łączności i sprzętu
Egzamin Zestaw 2 ściąga
ZESTAWY SCIAGA, Z9
ZESTAWY SCIAGA, Z7
Pytania i odpowiedzi zaliczenie23, pytania łaczność, zestawy, ściąga z łączności i sprzętu
ZESTAWY SCIAGA, Z8
Materiały Budowlane- opracowane zestawy 3 ściaga (końcowa)1, Materiały Budowlane
ZESTAWY SCIAGA, Z10
Materiały Budowlane- opracowane zestawy 3 ściaga (boczna koń, Materiały Budowlane
pytania testowe PC4 1 2, pytania łaczność, zestawy, ściąga z łączności i sprzętu
zestawy - sciaga, Studia, ZiIP, SEMESTR III, sciagi, sciagi
pytania testowe PK3 3 AB, pytania łaczność, zestawy, ściąga z łączności i sprzętu
ZESTAWY SCIAGA, Z5
pytania testowe PK3 3 AA, pytania łaczność, zestawy, ściąga z łączności i sprzętu
Kolokwium II - zestawy ściąga, do Szkoły, matura, praca mgr i podyplom., encyklopedie, ściągi, Odwod
pytana testowe PK3 2 AB, pytania łaczność, zestawy, ściąga z łączności i sprzętu
więcej podobnych podstron