Serwomechanizmy: (w układach precyzyjnych sterowania)
Nazywamy zewnętrzny układ sterowania.
(mocą prądem, siłą), w którym musi nastąpić wielokrotne zwiększenie mocy ..............szybko i dokładnie sygnał zadany
Serwomechanizmy:
maszyny technologicznie NC, CNC
lotnictwo cywilne, wojskowe (serwozawó2 2-stopniowy)
rys.1 Układ serwomechan. Śledzący...
Wykres.1
Rys.2 Serwomechanizm stopniowy...
Wykres.2
Kaskada hydrauliczna (zmiana sygnału elektrycznego, odpowiada zmianie ciśnienia) wzmocnienie kilka tysięcy.
Wykres.3
Wykres. 4
Oscylacyjny- rośnie w pewnym zakresie częstotliwości
Sygnał wzmocnienia zależy od:
Transniterecji
Od częstości sygnału
Ze wzrostem f maleje sygnał
Zasilanie układów Hydraulicznych
Rys.3
![]()
gdzie: N-siła, P.. ciśnienie,
układ najbardziej pewny w działaniu. b mała sprawność
Rys.4 wolny energooszczędny p= cons
Serwomechanizm jest to układ sterujący ze sprężeniem zwrotnym w którym wielkość....może być zmienna w czasie.
Celem serwomechanizmu jest całkowanie równań wielkości wejścia i wyjścia bez względu na zmiany wielkoci..........
Rys.5
Rys.6 schemat blokowy serwomechanizmu
Rys.7
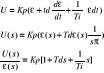
![]()
![]()
po podstawieniu otrzymamy:
![]()
Charakterystyki wejścia i wyjścia.
Przetwornik asynchroniczny
Rys.8 Przerzutnik asynchroniczny (RS)
![]()
Rys.8.a
Rys.9 przerzutnik (PLC)
J=0, K=0-stały J=1, K=0 zap Q=1
J=0, K=1 zgr. Q=0; J=1, K=1 zmiana ...... na prawy
Przerzutnik D
Rys.10
Schemat pamięci RAM
Rys.11 gdzie A-adres
Wykres do 11
Elementy Logiczne:
_elementy dwustawowe.
![]()
system dwójkowy.
![]()
System dwójkowy h-bitowy:
0=0000
1=0001
2=0010
3=0011
5=0101
Suma logiczna
y=a+b lub y=a∪b
rys.12
a |
b |
A lub b |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
1 |
1 |
1 |
1 |
Iloczyn logiczny
y=ab
rys.13
a |
b |
A lub b |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
0 |
0 |
1 |
1 |
1 |
Moduły logiczne:
NOR (NOT OR)
Rys.14 układ funkcjonalnie pełny
NAM (NOT AND)
NOR
NAND
Rys.15
TABLICE CARNEFFA
a |
b |
0 |
1 |
0 |
1 |
1 |
|
1 |
1 |
0 |
|
ab\cd |
00 |
01 |
11 |
10 |
00 |
1 |
0 |
0 |
1 |
01 |
1 |
0 |
1 |
1 |
11 |
0 |
0 |
0 |
0 |
10 |
0 |
0 |
0 |
1 |
![]()
rys.16
Rys.17
![]()
Charakterystyki Podstawowych elementów regulacji:
oscylacyjny
opóźniony
całkujący
różniczkujący
![]()
rys.18
Wykres.18
Rys.19 Regulacja gdzie VS-układ sterujący
.............układ pracuje bez błędu ustalonego
rys.20
Błąd ustalony spada do zera
Rys.21
Warunki główne urządzeń regulujących
Rys22
Wykres22
-człony formujące:
proporcjonalny P
całkujący J
różniczkowy D
Najchętniej używany to PJD
regulator proporcjonalny
całkujący
regulator PJ
![]()

wykres23
Regulator PD proporcjonalno-różniczkujący

Rys.24
Wykr24
Regulator PJD
rys25
wykr.
Rys.26
Rys.27
Bez regulatora
Regulator P
ΔR -błąd regulacji
Reg. PD
Czym większe wzmocnienie tym mniejszy błąd
Reg. PJ
ΔR w przybliz =0
Reg. PJD
ΔR je wyżej
Regulator pneumatyczny:
Rys.28 (zasilany sprężonym powietrzem)
Wykres (reg. Całkujący)
Rys.29 (reg. proporcjonalny)
Wykresy:
Rys.30 (proporcjonalno całkujący)
Wykresy
STABILNOŚĆ UKŁADÓW
Powody niestabilności układów:
Zmiana podania sterującego
Pojawienie się sil zakładających niestabilne zachowanie
Zachowania niestabilne dotyczą układów ze sprężeniem zwrotnym
Rys.31

Kryterium Harwitza:
mówi nam czy układ jest stabilny:
jeżeli wszystkie pierwiastki równania:
![]()
istnieją i są większe od zera wówczas układ nazywamy układem stabilnym.
Rys.32
Kryterium Nyguitsa
Żeby zapewnić stabilność układy z otwartą pętlą sprężenia zwrotnego
Rys.33
Gdy nasze wykresy nie przecinają punktu -1: 0 wówczas po zamknięciu pętli nasz układ będzie układem stabilnym
Rys.34
*******************
Element proporcjonalny;
Element inercyjny
Rys.40
R=1000Ω; C=10E-5[s\Ω]

Wyszukiwarka
Podobne podstrony:
Sciągi Ćwiczenia ściagawka
autom sciaga
ściągi świder, sciaga inż1
ŚCIĄGI, mikroby sciaga dokladka zzz niewiem, Wykład I
ściągi i egzaminy, ściąga na egzamin, 1
Ściągi z anatomii, Ściąga Układ oddechowy, Układ oddechowy
si sciagi, Si ściąga 2
ściągi wyższa, sciaga bartka mała schreiber i precyzyjna, XXI
wytrzymka ściągi, sem2 sciąga, ZGINANIE ZE SKRĘCANIEM
si sciagi, Si ściąga 1
Ściągi, kibleII-sciaga, SIEĆ WEWNĘTRZNA WODOCIĄGOWA- zaczyna się za wodomierzem od zaworu domowego
Ściągi mikro, Ściąga wykład 10, NIEPEWNOSC W ekonomii zakłada się ze podmiot działa racjonalnie-zast
Ściągi mikro, Ściąga wykład 3, Założ do teorii wyb kons celem działania ekonom jest max określonych
Opakowania - sciagi itp, sciagatow3, Definicja szkła jest to produkt pozostający w głównej masie nie
Ściągi mikro, Ściąga wykład 7
Ściągi mikro, Ściąga wykład 6, Aby prowadzić działalność trzeba mieć kapitał
sciagi rok 5, sciaga2, AGROBIOTECHNOLOGIE
Ściągi z anatomii, Ściąga Brzuch, Dla ułatwienia lokalizacji narządów i stanów patologicznych powier
Ściągi mikro, Ściąga wykład 6, Aby prowadzić działalność trzeba mieć kapitał
więcej podobnych podstron