Podstawy Automatyki - zaliczenie wykładu
Wiadomości wstępne
1. Co to jest obiekt sterowania?
Obiekt sterowania to jakiekolwiek urządzenie, układ lub element, na który chcemy oddziaływać lub chcemy nim sterować.
3. Co to jest skok jednostkowy? Sporządź rysunek.
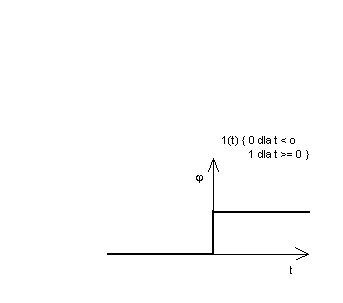
Skok jednostkowy jest gwałtowną zmianą jednej wartości na drugą.
6. Narysuj otwartą strukturę sterowania. Opisz występujące bloki i sygnały.
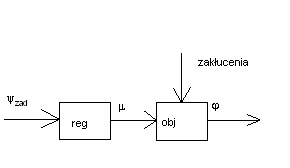
Ψ zad - sygnał zadany
μ - sygnał sterujący
φ - sygnał wyjściowy
7. Narysuj zamkniętą strukturę sterowania. Opisz występujące bloki i sygnały.
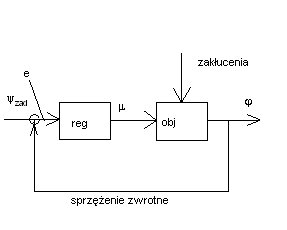
Ψ zad - sygnał zadany
μ - sygnał sterujący
φ - sygnał wyjściowy
e - uchyb regulacji
Modele obiektów sterowania
8. Wymień analityczne sposoby opisu własności obiektu dynamicznego.
a) równania różniczkowe
b) transmitancje:
- La Place'a (operatorowa)
- Fouriera (widmowa)
c) zmienne stanu
10. Co to jest transmitancja operatorowa?
Jest to stosunek transformaty sygnału wyjściowego do transformaty sygnału wejściowego, przy zerowych warunkach początkowych.
11. Jaki sens fizyczny mają zerowe warunki początkowe w definicji transminancji?
Jest to brak energii wewnętrznej w obwodzie przed załączeniem zasilania.
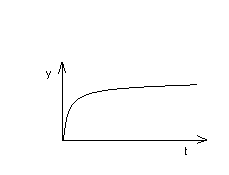
18. Co to jest charakterystyka skokowa?
Jest to odpowiedź układu na pobudzenie w postaci skoku jednostkowego.
19. Ile rodzajów charakterystyk częstotliwościowych występuje w opisie obiektów sterowania?
a) amplitudowa
b) fazowa
c) Nyquista
d) logarytmiczna
20. Jakie informacje można uzyskać z charakterystyki częstotliowściowej?
Charakterystyki częstotliowściowe mówią o tym, na jakie sygnały (z jakiego pasma f) badany obiekt będzie reagował a dla jakich nie. Mówią one też o o charakterystyce układu względem pasma przenoszenia sygnału.
21. Co to są charakterystyki logarytmiczne obiektu? Wyjaśnić przyczynę użycia słowa ”logarytmiczna”.
Charakterystyki logarytmiczne obiektu to charakterystyki Bodego tzn. zależność amplitudy od częstotliwości i fazy od częstotliwości. Słowa logarytmiczne używa się, ponieważ oś X (częstotliwość) wyskalowana jest logarytmicznie.
23. Wymienić podstawowe człony dynamiczne.
a) proporcjonalny
b) całkujący idealny
c) różniczkujący idealny
d) inercyjny
e) całkujący rzeczywisty
f) różniczkujący rzeczywisty
g) oscylacyjny
h) opóźniający
24. Podać transmitancję La Place'a i charakterystykę skokową członu inercyjnego.
![]()
gdzie: k - współczynnik wzmocnienia
T - stała czasowa
25. Podać transmitancję La Place'a i charakterystykę skokową członu różniczkującego rzeczywistego.
![]()
gdzie: ![]()
- stała czasowa różniczkowania
T - stała czasowa
28. Co to jest stabilność obiektu? Czy zależy ona od zewnętrznych sygnałów działających na obiekt?
Stabilność to zdolność układu do powracania do stanu równowagi po ustaniu przyczyny, która go ze stanu równowagi wytrąciła.
Stabilność jest cechą wewnętrzną układu, nie zależy od sygnałów działających na układ.
Wyróżniamy 3 stany:
a) asymptotycznie statyczny
b) na granicy stabilności
c) niestabilny
30. Które pierwiastki: licznika czy mianownika transmitancji decydują o stabilności obiektu ? Uzasadnij odpowiedź.
O stabilności obiektu decydują pierwiastki mianownika transmitancji, ponieważ są to bieguny transmitancji, a to od ich położenia w płaszczyźnie zespolonej zależy stabilność układu.
31. Co to jest kryterium stabilności? Wymień przykładowe.
Kryterium stabilności jest to metoda pozwalająca rozstrzygnąć o tym czy układ jest stabilny czy też nie. Przykłady:
a) analityczne: - Hurwitza
- Routha
b) graficzne: - Nyquista
32. Jeżeli stabilność możemy wnioskować na podstawie położenia biegunów transmitancji to, po co potrzebne są kryteria stabilności?
Kryteria stabilności są potrzebne, gdy nie potrafimy wyznaczyć biegunów transmitancji, oraz gdy chcemy znać więcej informacji na temat układu, niż tylko jego stabilność.
33. Do jakich układów nie możemy stosować kryterium Nyquista?
Kryterium to nie może być stosowane do układów otwartych.
34. Co to jest zapas modułu i zapas fazy? Do czego może być przydatny?
Zapas modułu - to krotność współczynnika wzmocnienia, która przy niezmienianym argumencie (fazie), doprowadza układ do granicy stabilności.
Zapas fazy - jest to przyrost argumentu (fazy), który przy niezmienianym współczynniku wzmocnienia doprowadza układ zamknięty do granicy stabilności.
Oba zapasy są bardzo przydatne, ponieważ informują nas jak bardzo możemy zmodyfikować układ, aby znalazł się na granicy stabilności.
35. Jak objawia się niestabilność w sygnale wyjściowym obiektu?
Sygnał wyjściowy układów niestabilnych rośnie wraz z czasem do nieskończoności.
39. Czy w metodzie charakterystyki skokowej można wyznaczyć parametry dowolnej transmitancji, czy tylko niektórych? Uzasadnij odpowiedź.
Nie można wyznaczyć bezpośrednio parametrów transmitancji kilku połączonych członów inercyjnych oraz parametrów transmitancji członu oscylacyjnego, ponieważ te transmitancje są pierwszego rzędu.
42. Podać wzór określający uchyb regulacji.
e = r - y
e - uchyb
r - sygnał zadany
y - sygnał wyjściowy
49. Czym charakteryzuje się stabilizacja ?
Sygnał zadany jest stały. Jest to utrzymanie pewnej wielkości na określonym zadanym poziomie niezależnie od zakłuceń.
54. Co to jest transmitancja uchybowa ?
Transmitancja uchybowa mówi nam jak zależy uchyb od sygnału zadanego.
![]()
Gp - transmitancja obiektu
Gr - transmitancja regulatora
55. Jaka jest różnica pomiędzy układem statycznym i astatycznym ?
Układ astatyczny ma przynajmniej jeden pierwiastek mianownika transmitancji w zerze. W układach statycznych przebieg y(t) się ustala, natomiast w astatycznych sygnał rośnie do nieskończoności.
57. Co to jest stan ustalony w procesie regulacji ?
To to czas po którym uchyb ma stały poziom.
66. Jakie są wady i zalety regulatora konwencjonalnego zawierającego człon całkujący ?
Zaletą jest uchyb ustalony równy 0, natomiast wadą jest to, żę układ zbliża się do granicy stabilności.
Wyszukiwarka
Podobne podstrony:
monter sieci i urzadzen telekomunikacyjnych 725[02] o1 01 n
monter elektronik 725[01] z3 03 n
monter elektronik 725[01] z1 02 u
monter elektronik 725[01] z2 01 n
monter sieci i urzadzen telekomunikacyjnych 725[02] z1 01 n
MP 08.82.725
monter sieci i urzadzen telekomunikacyjnych 725[02] z3 01 n
PN ISO 725
monter sieci i urzadzen telekomunikacyjnych 725[02] o1 03 n
monter sieci i urzadzen telekomunikacyjnych 725[02] o1 02 n
monter elektronik 725[01] z3 02 n
monter elektronik 725[01] z2 01 u
monter elektronik 725[01] z1 02 n
monter sieci i urzadzen telekomunikacyjnych 725[02] o2 01 u
monter elektronik 725[01] o1 06 n
monter elektronik 725[01] o2 02 n
monter elektronik 725[01] z2 03 u
więcej podobnych podstron