- Zadanie interpolacji polega na znalezieniu funkcji L, zwanej funkcją interpolującą , która w węzłach xi , i = 0, 1, ... ,n , pokrywa się z funkcją f (interpolowaną)
Ln(xi) = f(xi) dla i = 0, 1, ... , n .
------------------------------------------------------------------------------------------------------------------
TWIERDZENIE. Zadanie interpolacyjne Lagrange'a na jednoznaczne rozwiązanie, czyli istnieje tylko jeden wielomian spełniający powyższy warunek.
![]()
DOWÓD. Szukany wielomian zapiszemy w postaci
Zadanie interpolacji -> Ln(xi) = yi dla i = 0, 1, ... ,n
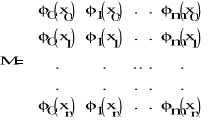
prowadzi do układu n+1 równań liniowych Va = y
![]()

Macierz Vandermonde'a jest macierzą nieosobliwą dla układu różnych węzłów. Zatem układ Va = y ma dokładnie jedno rozwiązanie. Istnieje wielomian postaci (**) i jest on wyznaczony jednoznacznie.
Postać Lagrange'a dla n =2 (3 węzły)

Newtona dla n =2 (3 węzły) ![]()
Iloraz różnicowy- wielkość charakteryzująca przyrost funkcji na danym przedziale.
Wyrażenia
1-go rzę du

2-go rzę du
, 
rzędu k
Niech w przedziale [a,b] danych będzie (n+1) punktów x0, x1, ... , xn , przy czym
a = x0 < x1 < ... < x n-1 < xn = b.
Funkcję s(x) określoną na przedziale [a,b] nazywamy funkcją sklejaną stopnia m , jeżeli
1) s(x) jest wielomianem stopnia co najwyżej m na każ dym podprzedziale (xi , xi+1) , i = 0,1,... , n-1
2) s(x) jest funkcją klasy C(m-1) ([a,b]) .
Zbiór wszystkich funkcji sklejanych stopnia m o węzłach xi ( i = 0,1,...,n) oznaczymy Sm .
Funkcja sklejana stopnia m zależ y od n (m+1) - m (n-1) = n+m parametrów.
Funkcję s(x) z Sm nazywamy interpolacyjną funkcją sklejaną stopnia m dla funkcji f , jeżeli
s(xi) = yi , i = 0,1,...,n
Dla m > 1 interpolacyjna funkcja sklejana zależ y od (m-1)
parametrów i należ y na nią nałożyć dodatkowe warunki.
Interpolacyjna
funkcja sklejana stopnia trzeciego zależ y od dwóch parametrów, wobec czego nakładamy na nią
dwa dodatkowe warunki. Warunki te najczęściej nakładamy w węzłach krańcowych a i b.
Np. mogą mieć one postać
s'(a + 0) =(alfa) oraz s'(b - 0) =(beta)
gdzie (alfa),(beta) są ustalonymi liczbami rzeczywistymi. Jeżeli funkcja f ma pochodne w punktach a i b
oraz znamy ich wartości, to możemy je przyją ć jako liczby występują ce po prawych stronach powyższych warunków. Natomiast, jeżeli znamy tylko wartości funkcji f w węzłach - mogą to
być przybliżenia pochodnych.
TWIERDZENIE. Istnieje dokładnie jedna interpolacyjna funkcja sklejana stopnia trzeciego
spełniają ca podane wyż ej dodatkowe warunki.
w przypadku wę zł ów równoodległ ych
(xi pokazuje nam maximum równe n) xi = x0 +ih, h = (b-a)/n , i = 0,1, ... ,n
Okreś lamy (n+3) funkcje i =i(x) , i = -1, 0, 1, ... , n , n+1 , które stanowią bazę przestrzeni
funkcji sklejanych trzeciego stopnia S3
W przybliżeniach interpolacyjnych przyjmuje się że funkcja przybliżająca L w punktach xi pokrywa się z wartościami funkcji f natomiast w aproksymacja jest zagadnieniem bardziej ogólnym. Warunek aby funkcja przybliżana i funkcja przybliżająca nie muszą przyjmować dokładnie tych samych wartości w punktach x1.
Przyjmujemy, ż e funkcja przybliżająca F jest okreś ona przez zależność
F(x) = F(x; a0, a1, .... , am)
od (m+1) parametrów a0, a1, ... , am , przy czym ![]()
Ogólnie , zagadnienie aproksymacji na zbiorze punktów X = {x0, x1, ... , xn } polega na
wyznaczeniu parametrów a0, a1, ... , am tak, aby odległości yi (i = 0,1, ... ,n) od F były
minimalne. Sposób wyznaczania parametrów zależy od tego , jak rozumiemy to kryterium. Interpolacja jest jedną z metod aproksymacji - nazywana jest
czę sto aproksymacją interpolacyjną .
W metodzie średniokwadratowej dyskretnej (najmniejszych kwadratów) współczynniki aj dobieramy tak aby odchylenie średniokwadratowe miało najmniejszą wartość.
Funkcję Fm(xi) (ta suma z m na górze ) dla której H osiąga minimum nazywamy m-tą funkcją optymalną.
Pochodna z H po ak k=0,1, …, m otrzymane równości tworzą układ (m+1) równań liniowych z (m+1) niewiadomymi a0, a1, ... , am , zwany układem równań normalnych.
Ga = b, gdzie G = [Gi,j] (i,j = 0,1, ... , m) , a = [a0, a1, ... , am ]T, b = [b0, b1, ... , bm ]T ,
, 
(i,j = 0,1, ... , m).
Macierz G, zwana macierzą Grama, jest macierzą kwadratową stopnia (m+1).
Moż na zapisać
G = MTM i b = MTy,
gdzie y = [y0, y1, ... , yn ]T i
Uwaga. Macierz G jest nieosobliwa wtedy i tylko wtedy, gdy rzą d macierzy M
jest równy (m+1).
Stą d wynika, ż e
Twierdzenie. Jeż eli rzą d macierzy M jest równy (m+1), to istnieje dokł adnie jedna m-ta
funkcja optymalna (w sensie aproksymacji ś redniokwadratowej dyskretnej).
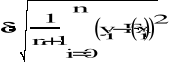
Bł ą d ś redniokwadratowy oblicza się ze wzoru
Jeż eli funkcje ![]()
są wielomianami stopnia j (j = 0, 1, 2 , ... , m), to Fm jest wielomianem stopnia
co najwyż ej m. Wtedy funkcję optymalną Fm nazywamy m-tym wielomianem (algebraicznym)
optymalnym.
W przypadku jednomianów ![]()
, już dla niedużych m (m>5) ukł ad równań normalnych
jest źle lub bardzo źle uwarunkowany. W przypadku przybliż eń wielomianowych z wyją tkiem ,
gdy m jest bardzo małe, nie należ y stosować takiego wyboru funkcji ![]()
. Należ y stosować
tzw. wielomiany Grama;
W zagadnieniach aproksymacji często spotykamy się z przypadkiem, gdy yi są wartościami
pomiarowymi pewnego zjawiska , o którym wiadomo, ż e ma przebieg okresowy. Wtedy
do aproksymacji korzystniej jest stosować wielomiany trygonometryczne, a nie algebraiczne.
Wyszukiwarka
Podobne podstrony:
Metody numeryczne - ściaga - mała do druku, Budownictwo Politechnika Warszawska, Semestr III, III Se
spr 24, Budownictwo Politechnika Warszawska, Semestr III, III Semestr, Przodki 3 sem, od justyny, 3
pomiary krysia, Budownictwo Politechnika Warszawska, Semestr III, III Semestr, Przodki 3 sem, od jus
spr 30, Budownictwo Politechnika Warszawska, Semestr III, III Semestr, Przodki 3 sem, od justyny, 3
Ćwiczenie 19, Budownictwo Politechnika Warszawska, Semestr III, III Semestr, Przodki 3 sem, od justy
Ćwiczenie 39, Budownictwo Politechnika Warszawska, Semestr III, III Semestr, Przodki 3 sem, od justy
wykres dyspersja, Budownictwo Politechnika Warszawska, Semestr III, III Semestr, Przodki 3 sem, od j
IKII OS, Budownictwo Politechnika Warszawska, Semestr III, III Semestr, Przodki 3 sem, Przodki, Inży
spr 10, Budownictwo Politechnika Warszawska, Semestr III, III Semestr, Przodki 3 sem, od justyny, 3
odpowiedzi na pytania, Budownictwo Politechnika Warszawska, Semestr III, III Semestr, Przodki 3 sem,
spr 20, Budownictwo Politechnika Warszawska, Semestr III, III Semestr, Przodki 3 sem, od justyny, 3
instr, Budownictwo Politechnika Warszawska, Semestr III, III Semestr, Przodki 3 sem, od justyny, 3 S
spr 19, Budownictwo Politechnika Warszawska, Semestr III, III Semestr, Przodki 3 sem, od justyny, 3
gamma, Budownictwo Politechnika Warszawska, Semestr III, III Semestr, Przodki 3 sem, od justyny, 3 S
A2-3, Przodki IL PW Inżynieria Lądowa budownictwo Politechnika Warszawska, Semestr 4, Inżynieria kom
slajdy TIOB W27 B montaz obnizone temperatury, Przodki IL PW Inżynieria Lądowa budownictwo Politechn
test z wydymałki, Przodki IL PW Inżynieria Lądowa budownictwo Politechnika Warszawska, Semestr 4, Wy
OPIS DROGI, Przodki IL PW Inżynieria Lądowa budownictwo Politechnika Warszawska, Semestr 4, Inżynier
Irek, Przodki IL PW Inżynieria Lądowa budownictwo Politechnika Warszawska, Semestr 4, Inżynieria kom
więcej podobnych podstron