|
LABOLATORIUM PODSTAW NAPĘDU ELEKTRYCZNEGO
|
WYKONALI: CABAJ PIOTR CHOJNACKI ROBERT GORGOSZ KRZYSZTOF LOZIA BARTŁOMIEJ CZARNECKI RAFAŁ MACHAJ DARIUSZ |
WYDZIAŁ: ELEKTRYCZNY ROK III SEMESTR IV GRUPA 1 |
TEMAT:
BADANIE UKŁADÓW KASKADOWYCH |
DATA WYKONANIA
25.03.98 |
NR ĆWICZENIA 4 |
|
OCENA:
|
CEL ĆWICZENIA.
Ćwiczenie ma na celu zapoznanie się ze sposobem regulacji prędkości kątowej silnika
indukcyjnego przez wprowadzenie dodatkowej siły elektromotorycznej do obwodu wirnika na przykładzie kaskad zaworowo-maszynowych .
ZAKRES ĆWICZENIA.
ZMIERZYĆ I WYZNACZYĆ CHARAKTERYSTYKI:
η=f(M)
ω=f(M)
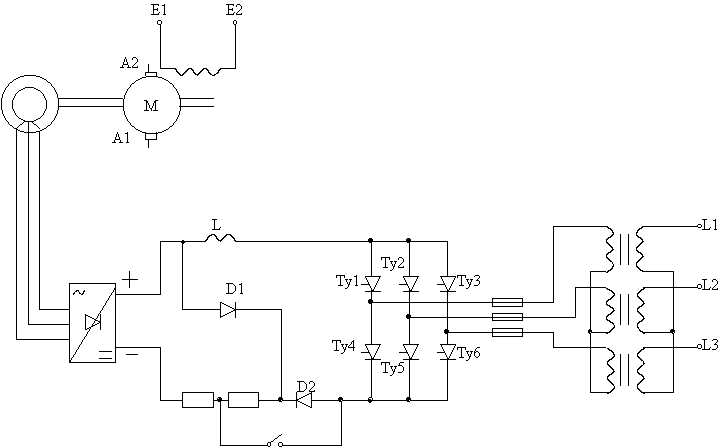
SCHEMAT POMIAROWY.
SPIS PRZYRZĄDÓW I DANE ZNAMIONOWE.
Woltomierz - kl.0,5 ; 1 αmax=75/60 dz zakresy pomiarowe: 75;150;500;600 [V]
Nr. 0203.93
Amperomierz - kl.0.5 αmax=5 dz zakresy pomiarowe: 2,5;5 [A]
Nr. 305485/72
Amperomierz - kl.0.5;1 αmax=60 dz zakresy pomiarowe: 3,6 [A]
Nr. 12041.76
3 watomierze - kl.0.5 αmax=100 dz zakresy pomiarowe: 100,200,400 [V]; 5,10 [A]
Nr. 05126/93 ; 2107485/71 ; 2107518/71
DANE ZNAMIONOWE MASZYN PRACUJĄCYCH W CZASIE ĆWICZENIA
Silnik indukcyjny pierścieniowy typ SZUe 34a nr.J800701
Pn=1,5kW
U1n=220/380 V
I1n=5,5/3,2 A
n=1400 obr/min
f=50 Hz
cosϕ=0,87
U2n=61 V
I2n=17 A
Rs=3,5 Ω (t=20 C)
Rr=0,25 Ω (t=20 C)
ΔPfe=60 W
ΔPm=220 W (straty całego zestawu przy n=1450 obr/min)
Prądnica prądu stałego typ PRBZC 132 MZ nr.482199
Pn=2,2kW
Utn=220 V
Itn=12,2 A
n=1485obr/min
Iwn=0,46
Rt=1,7 Ω (t=20 C)
Rw=380 Ω (t=20 C)
ΔPfe=30 W
ΔPm =240 W (straty całego zestawu przy n=1200 obr/min)
V. TABELE POMIAROWE.
LP |
It |
Ut |
Is |
P1 |
I obc |
P1obc |
P2 obc |
n |
Pc1 |
Pc obc |
P na wale |
η |
Me |
ω |
|
A |
V |
A |
W |
A |
W |
W |
Obr/min |
W |
W |
W |
- |
|
|
1 |
0,4 |
172 |
1,45 |
122,5 |
0,80 |
160 |
-140 |
1125 |
367,5 |
20 |
249,2 |
0,72 |
2,12 |
117,8 |
2 |
0,6 |
170 |
1,45 |
135 |
0,85 |
176 |
-150 |
1125 |
405 |
26 |
282,9 |
0,75 |
2,40 |
117,8 |
3 |
1,3 |
170 |
1,6 |
185 |
1,03 |
200 |
-190 |
1125 |
555 |
10 |
405,1 |
0,74 |
3,44 |
117,8 |
4 |
2 |
168 |
1,7 |
235 |
1,15 |
230 |
-220 |
1125 |
705 |
10 |
525,6 |
0,76 |
4,46 |
117,8 |
5 |
3,1 |
166 |
2 |
320 |
1,43 |
290 |
-280 |
1125 |
960 |
10 |
717,7 |
0,76 |
6,09 |
117,8 |
6 |
3,9 |
164 |
2,4 |
390 |
1,75 |
350 |
-310 |
1125 |
1170 |
40 |
856,1 |
0,76 |
7,27 |
117,8 |
7 |
4,5 |
162 |
2,75 |
440 |
2,05 |
410 |
-310 |
1125 |
1320 |
100 |
957,6 |
0,78 |
8,13 |
117,8 |
8 |
5,3 |
156 |
3 |
500 |
2,23 |
440 |
-360 |
1125 |
1500 |
80 |
1074,2 |
0,76 |
9,12 |
117,8 |
LP |
It |
Ut |
Is |
P1 |
I obc |
P1obc |
P2 obc |
n |
Pc1 |
Pc obc |
P na wale |
η |
Me |
ω |
|
A |
V |
A |
W |
A |
W |
W |
Obr/min |
W |
W |
W |
- |
|
|
1 |
0,3 |
130 |
1,4 |
110 |
0,725 |
-150 |
100 |
875 |
330 |
-50 |
219,2 |
0,58 |
1,86 |
91,6 |
2 |
0,44 |
128 |
1,45 |
152 |
0,775 |
-156 |
100 |
875 |
456 |
-56 |
236,8 |
0,46 |
2,01 |
91,6 |
3 |
1,2 |
120 |
1,55 |
165 |
0,9 |
-160 |
160 |
875 |
495 |
0 |
327,5 |
0,66 |
2,78 |
91,6 |
4 |
1,5 |
120 |
1,6 |
190 |
0,95 |
-160 |
180 |
875 |
570 |
20 |
365,4 |
0,66 |
3,10 |
91,6 |
5 |
2,2 |
116 |
1,75 |
235 |
1 |
-160 |
220 |
875 |
705 |
60 |
446,8 |
0,69 |
3,79 |
91,6 |
6 |
2,6 |
112 |
1,9 |
275 |
1,15 |
-160 |
270 |
875 |
825 |
110 |
487,4 |
0,68 |
4,14 |
91,6 |
7 |
3,4 |
106 |
2,1 |
340 |
1,3 |
-160 |
320 |
875 |
1020 |
160 |
568,1 |
0,66 |
4,82 |
91,6 |
8 |
4,4 |
96 |
2,4 |
425 |
1,55 |
-160 |
420 |
875 |
1275 |
260 |
648,9 |
0,64 |
5,51 |
91,6 |
9 |
5,4 |
88 |
2,8 |
500 |
1,8 |
-160 |
520 |
875 |
1500 |
360 |
725,2 |
0,64 |
6,16 |
91,6 |
WYKRESY.
WNIOSKI.
W przeprowadzonym ćwiczeniu badaliśmy regulację prędkości kątowej silnika indukcyjnego przez zastosowanie kaskad zaworowo-maszynowych.
Silnik połączony na wspólnym wale z prądnicą prądu stałego był rozpędzany do dwóch prędkości 1125 i 875 obr/min. W obydwu przypadkach obciążaliśmy silnik do wartości parametrów znamionowych i sprawdzaliśmy czy nastąpi zmiana prędkości kątowej . Jak widzimy na charakterystykach nie zmieniała się ona , więc była niezależna od obciążenia.
Sprawność układu kaskadowego różniła się podczas różnych prędkości obrotowych. Większa jest dla wyższej prędkości obrotowej. Większa jest dla wyższej prędkości obrotowej co jest równoznaczne z tym iż układ silnika i prądnicy pracuje bliskim warunkom znamionowym .
Sprawność układu nie jest zależna od momentu elektromagnetycznego silnika , natomiast wartość tego momentu jest zależna od prędkości obrotowej.
Podsumowując , zaletą układu kaskady zaworowo-maszynowej jest ekonomiczność regulacji , ze względu na zmianę mocy poślizgu silnika indukcyjnego na moc mechaniczną oddawaną na wał. Wadami natomiast są:
duże koszty , wynikające z zastosowania prostownika i maszyny pomocniczej
ograniczony zakres regulacji prędkości kątowej.
Wyszukiwarka
Podobne podstrony:
BADANIE INDUKCYJNEGO SILNIK, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elekt
badanie silnika obcowzbudnego, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped ele
stany awaryjne, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elektrryczny lab,
napęd roz, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elektrryczny lab, od ch
sprawko 2 izy, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, metody numeryczne, lab 2
napędyELEKTR(ćw.31), Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elektrryczny
met3Robaka, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, metody numeryczne, lab 3 int
Bad.ukł.rag.ham.siln.ind, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elektrry
GB napŕd, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elektrryczny lab, od chl
napŕd 1, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elektrryczny lab, od chlo
Napd1, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elektrryczny lab, od chlopa
Zastos. sterownikw w napdzie elektr, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, nap
spraw, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elektrryczny lab, od chlopa
więcej podobnych podstron