Ćwiczenie nr 3
REGULACJA EKSTREMALNA I
Laboratorium Automatyki i Sterowania
Zakład Energoelektroniki i Sterowania
Cel ćwiczenia
Celem ćwiczenia jest zapoznanie się z podstawami procesu regulacji ekstremalnej, której jakość działania charakteryzuje jedna wielkość Q, wyznaczenie jej wartości minimalnej, linii Q= constans (warstwic) na płaszczyźnie (![]()
) oraz przekrojów Q(![]()
) przy ![]()
= constans.
Wiadomości ogólne
W wielu problemach automatyzacji istnieje obiekt lub proces technologiczny, którego jakość działania da się scharakteryzować jedną wielkością Q. W określonej sytuacji wielkość ta ma przyjmować największą lub najmniejszą wartość możliwą. Wielkość Q może zależeć od jednej lub wielu wielkości wejściowych sterujących i zakłócających. Obiekt, w którym zależność wielkości wyjściowej Q od wielkości wejściowych można przedstawić za pomocą charakterystyki statycznej wykazującej ekstremum Q nazywamy obiektem ekstremalnym. Oddziaływanie zaś zmierzające do osiągnięcia prze Q wartości ekstremalnej nazywamy sterowaniem ekstremalnym.
Przykładem obiektu ekstremalnego może być piec przemysłowy, do którego się doprowadza paliwo i powietrze. Dąży się do maksymalizacji temperatury w piecu, przy czym należy zauważyć, że przy zbyt małej ilości powietrza następuje niepełne spalanie, zaś przy zbyt dużej ilości - temperatura maleje wskutek chłodzenia zimnym powietrzem. W obydwu przypadkach nie wykorzystuje się maksymalnych możliwości palnika. Ponadto na temperaturę w piecu wpływa wartość opałowa paliwa, temperatura powietrza i obciążenie cieplne.
Istnieje wiele czynników wpływających na temperaturę i przy pewnej kombinacji tych czynników należy się spodziewać osiągnięcia najwyższej temperatury. Na tym przykładzie widać istotne cechy sterowania ekstremalnego. W zasadzie interesują nas tylko dwie zależności statyczne, czyli taki dobór wartości ustalonych zmiennych sterujących (dopływu paliwa i powietrza), przy których zostanie osiągnięta wartość ekstremalna wskaźnika jakości temperatury). Bardzo istotny jest fakt, że nie można przewidzieć przy jakich wartościach zostanie to ekstremum osiągnięte, czyli sterowanie ekstremalne musi obejmować odszukanie ekstremum w danej sytuacji (przy zakłóceniach) oraz utrzymanie stanu obiektu zapewniającego pozostanie w ekstremum. Obiekt ekstremalny opisuje się zależnością:
![]()
, przy czym Q jest wielkością skalarną, wektor x oznacza zbiór wielkości za pomocą których można oddziaływać na obiekt w sposób zamierzony, zaś wektor z oznacza zakłócenia. Oddziaływanie na obiekt może się odbywać tylko za pośrednictwem x. Zakłócenia najczęściej zmianę postaci zależności![]()
, można jednak umownie określić zakłócenia pionowe ![]()
, wywołujące zmianę wartości ekstremalnej Q oraz zakłócenia poziome ![]()
, powodujące zmianę położenia ekstremum względem sterowania x. Efekt zakłócenia wprowadza „dezinformację” w układzie regulacji i utrudnia identyfikację charakterystyki ekstremalnej.
Można wyróżnić dwa rodzaje sterowania ekstremalnego: sterowanie w układzie otwartym i sterowanie w układzie zamkniętym.
W pierwszym przypadku oblicza się z góry wartości sygnałów sterujących. które zapewnią ustalenie punktu pracy w ekstremum. Obliczenia takie muszą być oparte na dokładnej znajomości zależności ![]()
. Znajomość tej zależności może wynikać z uprzednio przeprowadzonej procedury identyfikacji, przy czym oczywiście wymagana jest całkowita dostępność pomiarów zakłóceń z. Wobec tego taka metoda nie gwarantuje otrzymania ekstremum przy zakłóceniach zmieniających się na bieżąco, zatem praktycznie metoda ta jest mało przydatna, chyba że można wykorzystać informację pośrednią o zakłóceniach poprzez pomiar pomocniczych wielkości wyjściowych obiektu y.
Rys.1. Sterowanie ekstremalne: a) w układzie otwartym; b) w układzie zamkniętym
W drugim przypadku (sterowanie w układzie zamkniętym) zakłada się dostępność pomiaru tylko wskaźnika Q i w zależność i od charakteru zmian tego wskaźnika wywoływanie zmian sygnałów sterujących, zmierzających do nadania wielkości Q wartości ekstremalnej, zaś człon realizujący oddziaływanie na obiekt za pośrednictwem wielkości sterujących na zasadzie wykorzystania sprzężenia zwrotnego od wielkości Q jest regulatorem ekstremalnym. Idea regulacji, a więc sterowania w układzie ze sprzężeniem zwrotnym, ma znane zalety - uniezależnienie się od zakłóceń powodujących zmiany wartości Q, a więc w zasadzie zbędność informacji początkowej o obiekcie i jego charakterystykach.
W poszukiwaniu ekstremum ważną rolę odgrywają powierzchnie wewnątrz których wartość Q np. jest mniejsza od pewnej stałej. Po ich wykreśleniu na płaszczyźnie ![]()
możemy śledzić poruszanie się układu regulacji w czasie poszukiwania ekstremum. Elementarny krok układu regulacji ekstremalnej polega na poszukiwaniu minimum ![]()
(dla jednej zmiennej) przyjmując pozostałe zmienne jako stałe. Dalej następuje porzucenie dotychczasowego kierunku szukania tzn. przejście na szukanie minimum względem![]()
.
Układ ćwiczenia
Schemat modelu układu badanego w ćwiczeniu laboratoryjnym pokazano na rys poniżej. Obiekt dwuwymiarowy Q (X1,X2) ma charakterystykę o postaci:
Q (X1,X2) = a X12+b X1X2+cX22+z,
przy czym a ≈ c≈ 0,03, b ≈ 0,04, zmienne Q,X1,X2 są wyrażane w woltach, zakres zmian wynosi+/-10V.
Minimum Q równe z, osiąga się przy X1 = X2 = 0. Linie Q = constans są elipsami na płaszczyźnie (X1,X2), zaś przekroje Q(X1) przy X2 = const lub Q(X2) przy X1= const są parabolami. Sygnał z przedstawia zakłócenia pionowe. Strukturę obiektu można zmienić, włączając przycisk SYMETRIA, co powoduje, że b = 0 i linie Q = constans stają się elipsami o osiach X1 i X2,zbliżonymi do okręgów. Przycisk INERCJA powoduje dołączenie inercji pomiaru o stałej czasowej rzędu 1s. Członami wykonawczymi są dwa człony całkujące z możliwością wprowadzenia inercji sterowania, również rzędu 1s przez włączenie przycisku INERCJA znajdującego się na obok wskaźników X1i X2 .
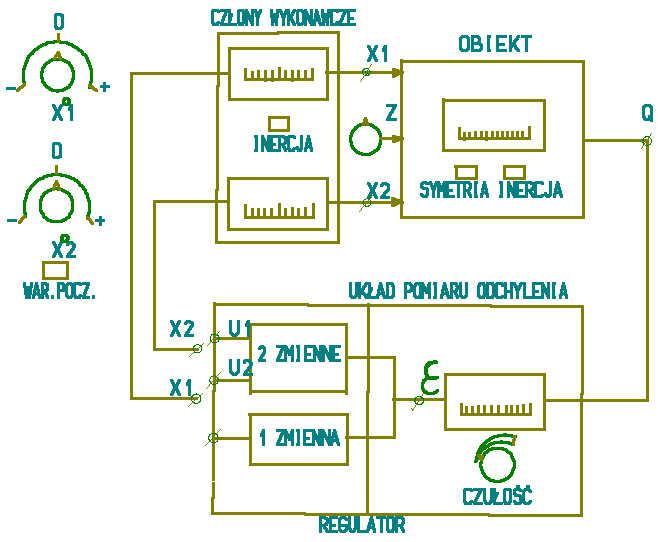
Rys. Schemat płyty czołowej ćwiczenia laboratoryjnego
Sterowanie w układzie otwartym można uzyskać włączając przycisk WARUNKI POCZĄTKOWE, odpowiednimi pokrętłami X1o i X2o można wtedy ustalić dowolne wartości X1 i X2, np. w celu dokładnego pomiaru charakterystyk obiektu .Włączenie przycisku warunków początkowych powoduje przejście na sterowanie sygnałami U1 i U2 od ustawionych wartości początkowych. W celu zamknięcia układu regulacji ekstremalnej należy dokonać połączenia przewodami zacisków X1 i X2 z odpowiednimi zaciskami wyjściowymi części sterującej regulatora. Przy połączeniu jednego z zacisków X1 lub X2 z zaciskiem U otrzymuje się układ regulacji jednej zmiennej(X1 lub X2) przy drugiej zmiennej traktowanej jako parametr(zakłócenie).Przy połączeniu obydwu zacisków X1 i X2 z zaciskami U1 i U2 (w dowolnym przyporządkowaniu) otrzymuje się układ regulacji dwu zmiennych. Część pomiarowa regulatora (pomiar odchylenia od ekstremum) jest wspólna: na wskaźniku obserwuje się wartość odchylenia, zaś wartość progową εp można nastawić pokrętłem CZUŁOŚĆ, kontrolując na wskaźniku poziom zerowania ε czyli progu przełączania. W chwili osiągnięcia przez ε wartości εp następuje skasowanie pamięci ekstremum, wyzerowanie ε, wygenerowanie impulsu inicjującego przełączenia w układzie logicznym(sterującym), po czym cykl pomiaru odchylenia rozpoczyna się od nowa. W układzie sterującym są dwa podukłady - jeden dla jednej zmiennej U, drugi dla dwóch zmiennych .
Pomiary.
Zbadać charakterystyki statyczne obiektu w układzie otwartym.
znaleźć „ręcznie” punkt ekstremalny i określić jego wartość,
wyznaczyć na płaszczyźnie

i
linie Q= constans (warstwice) dla obiektu symetrycznego i niesymetrycznego(co najmniej trzy warstwice, zaznaczyć punkt minimalny),wyznaczyć przekroje

przy stałej wartości
oraz
przy
= constans.
5.Sprawozdanie.
Sprawozdanie powinno zawierać:
schematy układów pomiarowych,
wyniki w postaci wykresów,
tabele z wynikami pomiarów,
wnioski.
Wyszukiwarka
Podobne podstrony:
Ident. obiektu dynamicznego nr2, UTP Bydgoszcz Elektrotechnika, IV semestr, automatyka
Pytania indukc synchroniczne, UTP Bydgoszcz Elektrotechnika, IV semestr, automatyka
Modelowanie analogowe nr4, UTP Bydgoszcz Elektrotechnika, IV semestr, automatyka
Ogranicznik amplitudy, UTP Bydgoszcz Elektrotechnika, IV semestr, energoelektronika
Badanie układów trójfazowych symetrycznych, UTP Bydgoszcz Elektrotechnika, II semestr
dławik, UTP Bydgoszcz Elektrotechnika, III semestr, teoria obwodów laborka
maruszczak, UTP Bydgoszcz Elektrotechnika, III semestr, projekt teoria obwodów maruszczak
Symulacyjna analiza widmowa czwórników pasywnych, UTP Bydgoszcz Elektrotechnika, III semestr, teoria
Regulacja impulsowa nr5, UTP Bydgoszcz Elektrotechnika, automatyka
sprawozdanie 1 (grupa B), UTP Bydgoszcz Elektrotechnika, II semestr
sprawozdanie5, UTP Bydgoszcz Elektrotechnika, II semestr
trojfazowy niesymetryczny1, UTP Bydgoszcz Elektrotechnika, III semestr, teoria obwodów laborka
madziara2, Budownictwo UTP, II rok, IV semestr, Instalacje, instalacje, sanit, Instalacje budowlane,
Zakres badan JEE, UTP Bydgoszcz Elektrotechnika, elektroenergetyka
Automaty tokarskie, UTP Bydgoszcz - Transport, III semestr, Techniki wytwarzania
Tabela obliczania zapotrzebowania na ciepło - madziara, Budownictwo UTP, II rok, IV semestr, Instala
Jakość energii elektrycznej wstep, UTP Bydgoszcz Elektrotechnika, elektroenergetyka
Instytut Energetyki Jakosc i niezawodnosc, UTP Bydgoszcz Elektrotechnika, elektroenergetyka
Tabela zest. wsp. U cz1, Budownictwo UTP, II rok, IV semestr, Instalacje, instalacje, sanit, Instala
więcej podobnych podstron