|
|
POLITECHNIKA ŚLĄSKA WYDZIAŁ ELEKTRYCZNY KATEDRA MECHATRONIKI |
|
|||
Laboratorium Mechaniki i Mechatroniki |
||||||
Nr: 6 |
Temat: Drgania układów n-masowych - pomiary i symulacje |
|||||
Wykonano: 23.11.2011 |
Oddano: 21.12.2011 |
|||||
|
Prowadzący: dr inż. Paweł Kielan |
|
||||
|
Nazwisko i Imię |
Ocena |
Data, podpis |
|||
Studia: SI Elektrotechnika Semestr: III Grupa: II Sekcja: II Dz. i godz. zajęć Środa, godz. 1015 |
…………………………………………… …………………………………………… …………………………………………… …………………………………………… …………………………………………… |
……… ……… ……… ……… ……… |
|
|||

I. Cel ćwiczenia
Celem ćwiczenia jest zapoznanie się z następującymi zagadnieniami:
- Zapoznanie się z możliwością wykorzystania środowiska Matlab-Simulink do symulacji
drgań układów elektromechanicznych;
- Opanowanie formalizmu Lagrange'a II rodzaju do formułowania dynamicznych równań
ruchu;
- Określenie częstotliwości rezonansowych dla n- masowego układu drgań skrętnych.
II. Wprowadzenie teoretyczne
Metoda Sztywnych Elementów Skończonych polega na skupieniu masy (tzw. dyskredytacji) , dzięki której z rzeczywistego układu o nieskończonej liczbie swobody otrzymujemy układ gdzie liczba swobody jest skończona. Następnie węzły, dla których dokonano skupienia masy (tzw. węzły redukcji) łączy się między sobą elementami sprężystymi i tłumiącymi. Dzięki tym zabiegom możemy obliczyć ruch korzystając z tzw. równań Lagrange'a oraz zależności na energię.
Równania Lagrange'a II rodzaju:
Metodę SES wykorzystuje się do obliczeń częstotliwości rezonansowych rzeczywistych układów przeniesienia napędów, stosuje się ją także do symulowania odkształceń, naprężeń, przemieszczeń a także do określenia wytrzymałość konstrukcji. Za pomocą tejże metody możliwe jest uzyskanie wyników dla skomplikowanych kształtów , dla których przeprowadzenie obliczeń analitycznych nie byłoby możliwe.
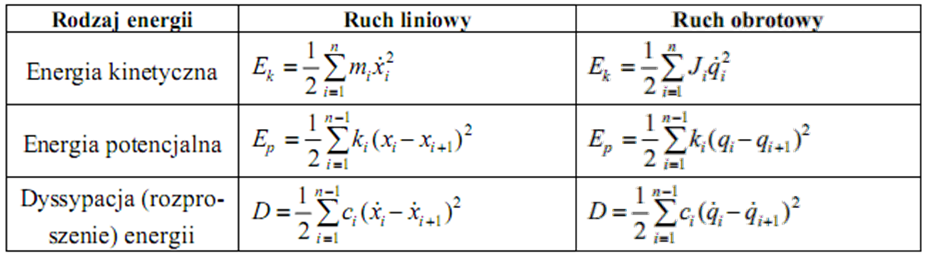
Zależności na energię dla ruchu liniowego i obrotowego:
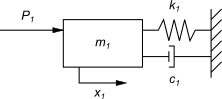
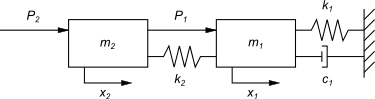
III. Równania Lagrange'a dla układów
IV. Symulacje w programie Matlab - Simulink
Implementacja
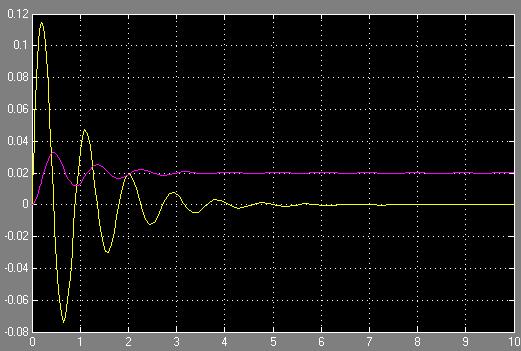
Przykładowy wykres dla parametru k = 2
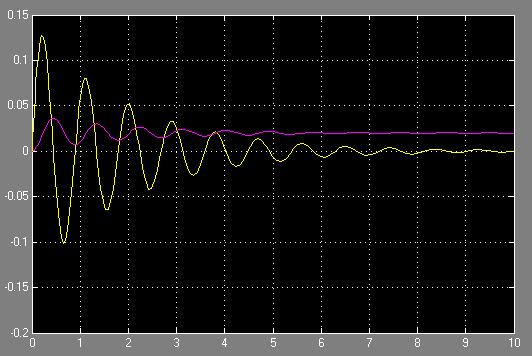
Przykładowy wykres dla parametru k = 1
Wyniki symulacji
V. Wnioski
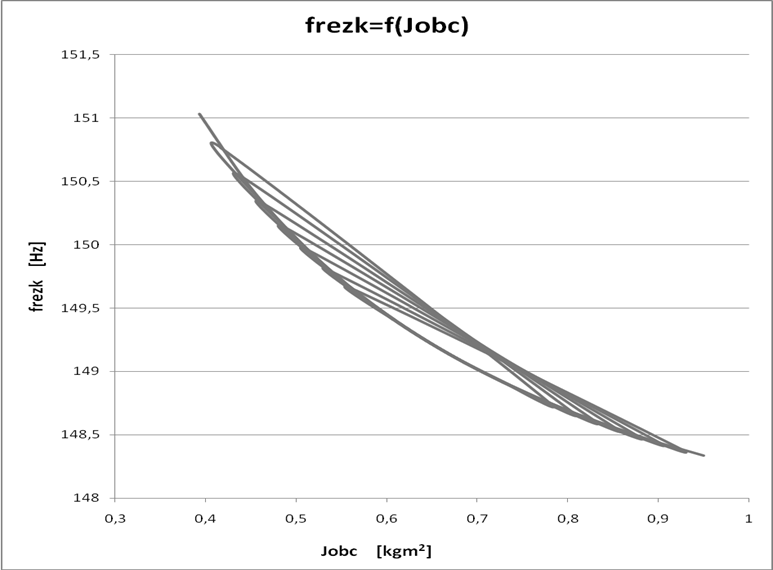
Dokonując symulacji przy pomocy programu Matlab-Simulink, uzyskaliśmy zależność momentu obciążenia i częstotliwości w zależności od wypełnienia tarczy bezwładnościowej krążkami, dla różnych konfiguracji wypełnienia tarczy.
Dla uzyskanych w wyniku symulacji pomiarów otrzymaliśmy charakterystykę malejącą frezk=f(Jobc), gdzie wraz ze wzrostem obciążenia tarczy obserwujemy spadek częstotliwości rezonansowej.
Także zmieniając parametry symulacji wykonywanej w punkcie IV zauważyliśmy znaczne różnice w charakterystykach wyjściowych badanego układu. Dla przykładu zwiększanie wartości parametru m oraz zmniejszanie k (współczynnika sprężystości) znacznie wydłużało czas potrzebny na ustabilizowanie się układu.
Wyszukiwarka
Podobne podstrony:
!Sprawozdanie tytuł, STUDIA, Mechanika i mechatronika, MiM laboratorium
!teczka tytuł, STUDIA, Mechanika i mechatronika, MiM laboratorium
Laboratorium sprawozdania cz. 3, Mechanika III semestr, Fizyka, Laboratoria i sprawozdania
Laboratorium sprawozdania cz. 3, Mechanika III semestr, Fizyka, Laboratoria i sprawozdania
CHEMIA - LABORATORIUM - SPRAWOZDANIE - Klasyfikacja połączeń nieorganicznych - wersja 2, STUDIA
CHEMIA - LABORATORIUM - SPRAWOZDANIE - Wyznaczanie przewodnictwa granicznego elektrolitów, STUDIA
F10- sprawozdanie Wojtka, STUDIA (ochrona), ROK I, Fizyka, laboratoria
Laboratorium sprawozdania cz. 3, Mechanika III semestr, Fizyka, Laboratoria i sprawozdania
Cwiczenie 53c, Akademia Górniczo - Hutnicza, Technologia Chemiczna, Studia stacjonarne I stopnia, SE
Cwiczenie 11i, Akademia Górniczo - Hutnicza, Technologia Chemiczna, Studia stacjonarne I stopnia, SE
Laboratorium sprawozdania cz. 3, Mechanika III semestr, Fizyka, Laboratoria i sprawozdania
Chemia laboratorium sprawozdanie, Studia, chemia, laborki
sprawko cement hanula, Studia PG, Semestr 04, Technologia betonów, Laboratorium, Sprawozdania
Sprawozdanie - Cement, Studia PG, Semestr 04, Technologia betonów, Laboratorium, Sprawozdania
Laboratorium sprawozdania cz. 3, Mechanika III semestr, Fizyka, Laboratoria i sprawozdania
więcej podobnych podstron