Sprawozdanie
Warunkiem poprawnego działania silnika indukcyjnego jest wzajemne oddziaływanie pola magnetycznego i prądu w uzwojeniu wirnika powodujące wytworzenie momentu obrotowego. Stojan silnika indukcyjnego budowy pierścieniowej składa się z korpusu stalowego w formie walca oraz z zamocowanego w nim pierścienia blach stalowych. Blachy stojana mają wycięte w obwodzie żłobki, w których umieszcza się uzwojenie stojana. Początki i końce uzwojeń wszystkich trzech faz wyprowadza się na zewnątrz i dołącza się do zacisków na tablicy zaciskowej w gwiazdę lub trójkąt. W silniku pierścieniowym uzwojenie wirnika wykonuje się w sposób podobny jak uzwojenie stojana i łączy się je przeważnie w gwiazdę, aby umożliwić rozruch za pomocą rozrusznika. Wtedy jedne końce uzwojenia wirnika są połączone we wspólny punkt, a drugie końce tego uzwojenia są dołączone do pierścieni ślizgowych, osadzonych na wale wirnika, ale izolowanych od niego. Na pierścieniach umocowane są trzy szczotki węglowe w trzymadłach szczotkowych przymocowanych do pokrywy. Za pomocą pierścieni i szczotek łączy się uzwojenie wirnika z rozrusznikiem. Przy rozruchu szczotki ustawione są na pierścieniach, prąd przepływa przez nie do rozrusznika. W czasie normalnej pracy silnika (po dokonaniu rozruchu) szczotki są zazwyczaj podnoszone przez specjalny mechanizm, który zwiera ze sobą wszystkie trzy fazy uzwojenia wirnika.
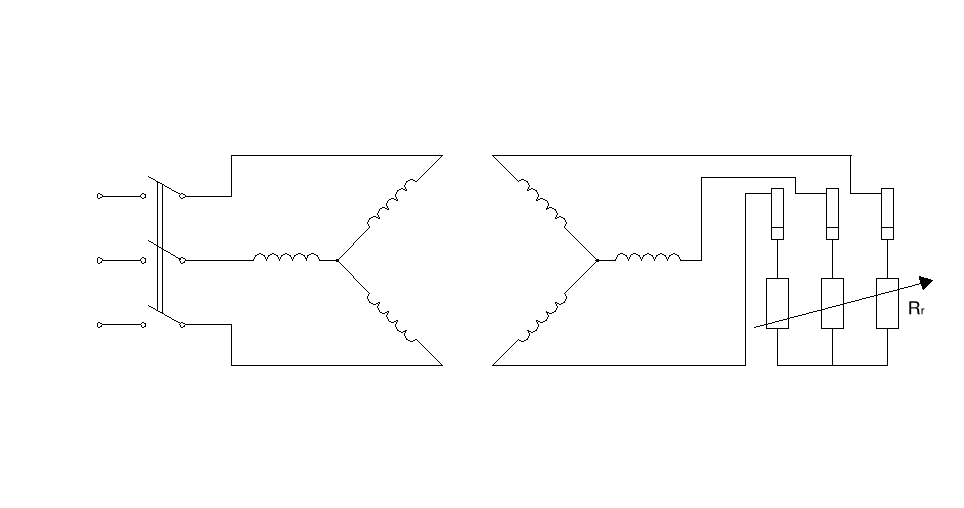
Aby silnik indukcyjny mógł ruszyć jego moment rozruchowy musi być większy od momentu hamującego. W tym przypadku silnik zwiększa swoją prędkość obrotową aż do chwili, gdy nastąpi równowaga między momentem obrotowym i hamującym. Rozruchu silnika pierścieniowego dokonuje się przy włączonych w obwód wirnika opornikach rozruchowych.
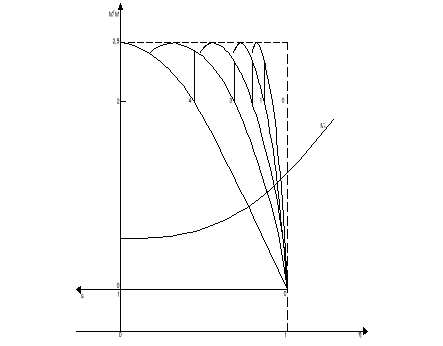
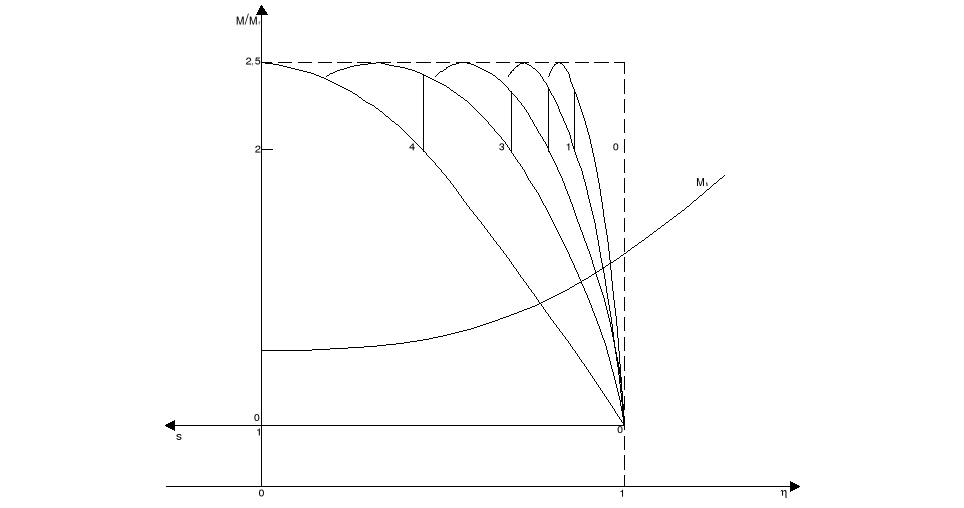
Opornik rozruchowy Rr ma zwykle kilka stopni, umożliwiających w miarę wzrostu prędkości obrotowej wirnika przechodzenie na coraz inną charakterystykę M=f(s) odpowiadającą coraz innej wartości rezystancji Rr.
Przy rozruchu liczba stopni rozruchowych zwykle nie przekracza czterech. Sposób ten stosowany jest przy tzw. rozruchach ciężkich (tzn. gdy silnik od razu obciążony jest dużym momentem hamującym. Wartość prądu rozruchowego nie zależy od wartości momentu hamującego, lecz od wartości rezystancji dodatkowej.
Celem ćwiczenia było poznanie budowy i zasady działania silnika indukcyjnego budowy pierścieniowej, oraz wyznaczenie na zasadzie pomiarów charakterystyk obciążenia (roboczych)
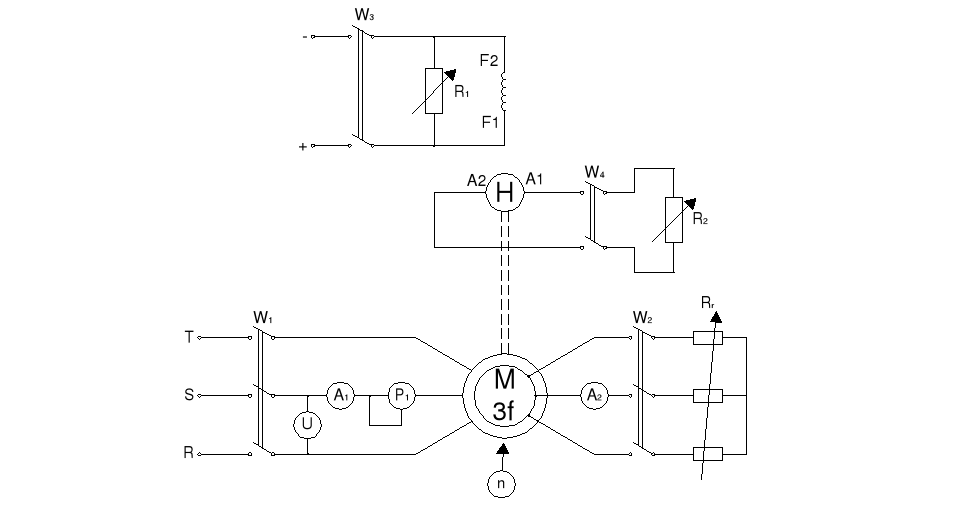
Poniższy schemat przedstawia układ pomiarowy, który wykorzystywaliśmy do badań silnika pierścieniowego, trójfazowego, a potem do wyznaczenia jego charakterystyk (na podstawie danych zebranych podczas doświadczenia).
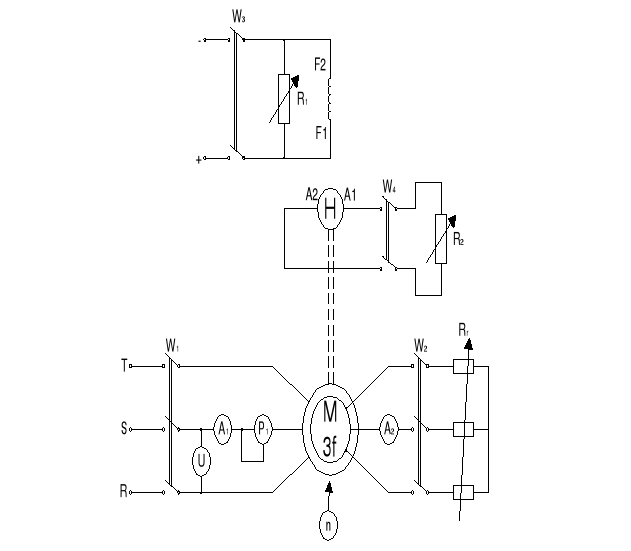
Pomiarów dokonywaliśmy przy trzech różnych ustawieniach rezystora trójfazowego Rr (dla pozycji „0”, „3” i „6”), regulując za każdym razem opór R2. Pierwszy pomiar, dla każdego ustawienia Rr był przeprowadzony na wyłączonym hamulcu, czyli bez włączonego uzwojenia wzbudzenia hamulca (F1-F2) tzn. przy wyłączonym wyłączniku W3. Wyniki pomiarów zebrane zostały w poniższej tabelce.
położenie „0”
Pomiary |
Obliczenia |
|||||||||
U |
I1 |
P1 |
I2 |
n |
f |
M obc |
P3 |
Puż |
η |
S |
[V] |
[A] |
[W] |
[A] |
[obr./min.] |
Hz |
Nm |
[W] |
[W] |
- |
% |
401,8 |
1,38 |
64 |
2,4 |
1230 |
50 |
0 |
192 |
0 |
0 |
18 |
401,8 |
1,38 |
88 |
3,5 |
1230 |
50 |
0,981 |
264 |
126,7 |
0,479 |
18 |
401,8 |
1,45 |
130 |
5,9 |
1200 |
50 |
1,961 |
390 |
247,1 |
0,634 |
20 |
401,8 |
1,63 |
216 |
9,9 |
1140 |
50 |
3,432 |
648 |
410,9 |
0,634 |
24 |
394,9 |
1,9 |
312 |
13 |
1180 |
50 |
4,903 |
936 |
517,5 |
0,611 |
26 |
Pomiary przy pozostałych dwóch ustawieniach rezystora Rr („3” i „6”) zostały przeprowadzone analogicznie do poprzedniego, co zostało podane odpowiednio w tabelkach
położenie „3”
Pomiary |
Obliczenia |
|||||||||
U |
I1 |
P1 |
I2 |
n |
f |
M obc |
P3 |
Puż |
η |
S |
[V] |
[A] |
[W] |
[A] |
[obr./min.] |
Hz |
Nm |
[W] |
[W] |
- |
% |
401,8 |
1,35 |
64 |
2,4 |
1200 |
50 |
0 |
192 |
0 |
0 |
20 |
401,8 |
1,38 |
72 |
2,7 |
1170 |
50 |
0,981 |
216 |
120,5 |
0,558 |
22 |
401,8 |
1,43 |
128 |
5,4 |
1080 |
50 |
2,452 |
384 |
278,0 |
0,724 |
28 |
401,8 |
1,53 |
180 |
7,8 |
990 |
50 |
2,550 |
540 |
265,0 |
0,490 |
24 |
394,9 |
1,65 |
228 |
10,1 |
960 |
50 |
3,432 |
684 |
345,9 |
0,506 |
36 |
położenie „6”
Pomiary |
Obliczenia |
|||||||||
U |
I1 |
P1 |
I2 |
n |
f |
M obc |
P3 |
Puż |
η |
S |
[V] |
[A] |
[W] |
[A] |
[obr./min.] |
Hz |
Nm |
[W] |
[W] |
- |
% |
398,4 |
1,34 |
72 |
2,7 |
990 |
50 |
0 |
216 |
0 |
0 |
34 |
401,8 |
1,35 |
96 |
4 |
870 |
50 |
1,471 |
288 |
134,4 |
0,466 |
42 |
401,8 |
1,44 |
128 |
5,6 |
720 |
50 |
2,452 |
384 |
185,4 |
0,483 |
52 |
401,8 |
1,65 |
232 |
10,8 |
270 |
50 |
3,923 |
696 |
111,2 |
0,1598 |
82 |
394,9 |
1,7 |
248 |
11,8 |
180 |
50 |
3,923 |
744 |
74,14 |
0,100 |
88 |
Wnioski:
Przy wzroście Rr mamy właściwie przy odpowiednich malejących R2 te same wartości P3. W analogicznej sytuacji spada moc Puż, oraz sprawność silnika w przeciwieństwie do poślizgu S, który rośnie. W zakresie pomiarów na jednym ustawieniu (w jednym położeniu Rr) przy spadku R2 obserwujemy spadek prędkości obrotowej silnika, oraz spadek sprawności, pozostałe wartości rosną.
Wyszukiwarka
Podobne podstrony:
PIII - teoria, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektro
elektra P4, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektronik
elektra M4, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektronik
jasiek pytania, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektr
M2, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektronika i Elek
Wnioski do stanu jałowego trafo, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II
Elektra M-2spr, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektr
elektra M5, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektronik
Transformator, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektro
Pomiary-protokół, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elek
elektra M6a, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektroni
Wnioski M2, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektronik
pytania na egzamin z elektrotechniki ii ciag 1, Studia, SiMR, II ROK, III semestr, Elektrotechnika i
Tabele-elektraP1, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elek
elektra M4 tab, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektr
Sprawko z P2, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektron
więcej podobnych podstron