Politechnika Lubelska
Wydział Elektryczny
Laboratorium Stacji Elektroenergetycznych
Ćwiczenie nr 7
Temat: Badanie układów samoczynnej kompensacji mocy biernej.
Ćwiczenie wykonali: Paweł Błażejowski Grzegorz Kowalik Tomasz Nurzyński |
|
1. Cel ćwiczenia.
Celem ćwiczenia jest zapoznanie się z układami do samoczynnej kompensacji mocy biernej stosowanymi w zakładach przemysłowych.
2. Schemat układu pomiarowego.
QC - bateria kondensatorów
QL - odbiorniki indukcyjne
P - odbiorniki rezystancyjne
3. Badanie układu bez kompensacji mocy biernej.
a) Tabela pomiarów i obliczeń (
Lp |
Us |
I'1 |
I2 |
I3 |
P' |
Q' |
I1 |
S |
P |
Q |
QC |
cos |
- |
V |
A |
A |
A |
W |
Var |
A |
VA |
W |
Var |
Var |
- |
1 |
400 |
2 |
2 |
0 |
260 |
600 |
5 |
3464,10 |
780 |
1039,23 |
0 |
0,60 |
2 |
400 |
1,8 |
2 |
0,27 |
260 |
500 |
4,5 |
3117,69 |
780 |
866,03 |
187,06 |
0,67 |
1 - bez kompensacji
2 - z częściową kompensacją
Przykładowe obliczenia (Lp 2)
I1 = I'1 = 5/2*1,8 ≈ 4,5 A
S = 31/2*Us*I1 = 31/2*400*4,5 ≈ 3117,69VA
P = 3*P' = 3*260 = 780 W
Q = 31/2*Q' = 31/2*600 ≈ 1039,23 Var
Qc = 31/2*Us*I3 = 31/2*400*0,27 ≈ 187,06 Var
cos = P/(P2 + Q2)1/2 = 780/(7802 + 1039,232)1/2 ≈ 0,67
4. Charakterystyka regulatora RC - 2.
a) Tabela pomiarów i obliczeń.
|
I'1 |
I2 |
P' |
Q' |
I1 |
P |
Q |
S |
cos |
|
A |
A |
W |
Var |
A |
W |
Var |
VA |
- |
zał |
0,4 |
1 |
65 |
100 |
1 |
195 |
173,21 |
692,82 |
0,75 |
|
0,8 |
2 |
160 |
160 |
2 |
480 |
277,13 |
1385,64 |
0,87 |
|
1,2 |
3 |
220 |
240 |
3 |
660 |
415,69 |
2078,46 |
0,85 |
|
1,6 |
4 |
285 |
360 |
4 |
855 |
623,54 |
2771,28 |
0,81 |
|
1,9 |
4,8 |
340 |
440 |
4,75 |
1020 |
762,10 |
3290,90 |
0,80 |
wył |
0,4 |
1 |
90 |
40 |
1 |
270 |
69,28 |
692,82 |
0,97 |
|
0,8 |
2 |
160 |
100 |
2 |
480 |
173,21 |
1385,64 |
0,94 |
|
1,2 |
3 |
250 |
180 |
3 |
750 |
311,77 |
2078,46 |
0,92 |
|
1,6 |
4 |
330 |
240 |
4 |
990 |
415,69 |
2771,28 |
0,92 |
|
1,9 |
4,8 |
380 |
310 |
4,75 |
1140 |
536,94 |
3290,90 |
0,90 |
Przykładowe obliczenia (zał 2)
I1 = I'1 = 5/2*0,8 ≈ 2A
S = 31/2*Us*I1 = 31/2*400*2 ≈ 1385,64 VA
P = 3*P' = 3*160 = 480 W
Q = 31/2*Q' = 31/2*160 ≈ 277,13 Var
cos = P/(P2 + Q2)1/2 = 480/(4802 + 1358,642)1/2 ≈ 0,87
b) Charakterystyka cos = f(I2)
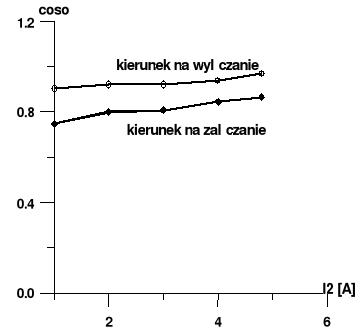
5. Charakterystyka regulatora RC - 4.
a) Tabela pomiarów i obliczeń.
|
I'1 |
I2 |
P' |
Q' |
I1 |
P |
Q |
S |
cos |
|
A |
A |
W |
Var |
A |
W |
Var |
VA |
- |
zał |
0,45 |
1 |
85 |
120 |
1,125 |
255 |
207,85 |
779,42 |
0,78 |
|
0,8 |
2 |
130 |
200 |
2 |
390 |
346,41 |
1385,64 |
0,75 |
|
1,2 |
3 |
210 |
280 |
3 |
630 |
484,97 |
2078,46 |
0,79 |
|
1,6 |
4 |
270 |
380 |
4 |
810 |
658,18 |
2771,28 |
0,78 |
|
2 |
5 |
350 |
450 |
5 |
1050 |
779,42 |
3464,10 |
0,80 |
wył |
0,4 |
1 |
85 |
40 |
1 |
255 |
69,28 |
692,82 |
0,97 |
|
0,8 |
2 |
160 |
120 |
2 |
480 |
207,85 |
1385,64 |
0,92 |
|
1,2 |
3 |
240 |
200 |
3 |
720 |
346,41 |
2078,46 |
0,90 |
|
1,6 |
4 |
320 |
280 |
4 |
960 |
484,97 |
2771,28 |
0,89 |
|
2 |
5 |
390 |
380 |
5 |
1170 |
658,18 |
3464,10 |
0,87 |
-
obliczenia jak w poprzednim punkcie
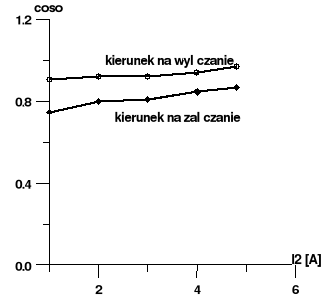
b) Charakterystyka cos = f(I2)
6. Kompensacja mocy biernej w układzie o zmiennym obciążeniu (przy wykorzystaniu regulatora RC - 2).
a) Tabela pomiarów i obliczeń.
wielkość |
Załączanie |
|||||
I'1 |
A |
1,80 |
1,60 |
1,35 |
1,25 |
1,15 |
I2 |
A |
5,00 |
4,00 |
3,40 |
3,00 |
2,80 |
I3 |
A |
0,36 |
0,62 |
0,94 |
1,20 |
1,48 |
P' |
W |
80 |
70 |
70 |
70 |
70 |
Q' |
Var |
620 |
480 |
380 |
260 |
160 |
t |
s |
0 |
45 |
37 |
46 |
100 |
t |
s |
0 |
45 |
82 |
128 |
228 |
I1 |
A |
4,5 |
4,0 |
3,38 |
3,13 |
2,88 |
P |
W |
240 |
210 |
210 |
210 |
210 |
Q |
Var |
1074 |
831 |
658 |
450 |
277 |
QC |
Var |
237 |
658 |
619 |
790 |
974 |
S |
VA |
2962 |
2633 |
2225 |
2060 |
1896 |
cos |
- |
0,2181 |
0,2450 |
0,3040 |
0,4229 |
0,6041 |
b) Charakterystyki S = f(t), P = f(t), Q = f(t)
dla załączania
7. Wnioski.
W tym ćwiczeniu badaliśmy dwa regulatory RC-2 i RC-4 do samoczynnej kompensacji mocy biernej. Badane regulatory RC są typowymi przemysłowymi regulatorami. Jak wiadomo poprawa współczynnika mocy polega na zmianie charakteru odbioru, kompensujemy moc poprzez włączanie baterii kondensatorów. Baterie kondensatorów są jednym ze sposobów sztucznego poprawienie współczynnika mocy. Kondensatory mają wiele zalet. Są bardzo proste konstrukcyjnie i pozbawione części i mechanizmów ruchomych. Mają bardzo małe straty czynne. Są produkowane w niewielkich jednostkach, z których z łatwością można zmontować baterię. Nie hałasują. Można łatwo dołączać i odłączać poszczególne człony.
Zastosowanie częściowej kompensacji poprawia (choć nieznacznie) współczynnik mocy. Charakterystyki regulatorów wyznaczonych w punktach 4 i 5 są podobne. Przy wzroście prądu odbiornika i przy zmianie jego charakteru następuje automatyczne włączenie lub odłączenie kondensatorów przy wzroście coso.
Wyszukiwarka
Podobne podstrony:
Instrukcja Nokia 5310 XpressM
5310
5310
5310
5310
5310
5310
5310
5310
5310
Instrukcja Nokia 5310 XpressM
Nokia 5310 XpressMusic EN
więcej podobnych podstron