Politechnika Wrocławska Filia w Wałbrzychu
|
Bartosiewicz Tomasz Forenc Krzysztof Kąkol Marcin Kita Marcin Krysmalski Andrzej Legeżyński Andrzej |
Wydział Elektryczny Rok III 1999/2000 |
||
Temat: Badanie układów regulowanego hamowania silników indukcyjnych |
||||
Nr ćwiczenia: 2 |
Laboratorium Napędu Elektrycznego |
Ocena: |
||
Data ćwiczenia: 15.03.2000 |
|
|
||
1.CEL ĆWICZENIA
Celem ćwiczenia było zbadanie przebiegu hamowania dynamicznego silnika asynchronicznego przy różnych wartościach prądu oraz różnej rezystancji.
2. SCHEMAT UKŁADU POMIAROWEGO
3. TABELE POMIAROWE
Lp. |
I |
U |
M |
n |
ω |
k |
UWAGI |
||||||
|
st |
α |
[A] |
st |
α |
[V] |
st |
α |
[Nm] |
obr |
Rad/s |
- |
|
1 |
0,2 |
20 |
4 |
4,0 |
55 |
220 |
0,25 |
23 |
5,75 |
1250 |
130,8 |
1,2 |
Rh1=0,51
Iek=3,9 [A] |
2 |
0,2 |
22,5 |
4,5 |
4,0 |
50 |
200 |
0,25 |
26 |
6,5 |
1100 |
115,1 |
1,2 |
|
3 |
0,2 |
27 |
5,4 |
4,0 |
41 |
164 |
0,25 |
31 |
7,75 |
850 |
89,0 |
1,3 |
|
4 |
0,2 |
30,5 |
6,1 |
4,0 |
36 |
144 |
0,25 |
38 |
9,5 |
725 |
75,9 |
1,2 |
|
5 |
0,2 |
35 |
7 |
4,0 |
31 |
124 |
0,25 |
44 |
11 |
600 |
62,8 |
1,3 |
|
6 |
0,2 |
38 |
7,6 |
4,0 |
29 |
116 |
0,25 |
47 |
11,75 |
540 |
56,5 |
1,3 |
|
7 |
0,2 |
40 |
8 |
4,0 |
27 |
108 |
0,25 |
51 |
12,75 |
480 |
50,2 |
1,3 |
|
8 |
0,2 |
42,5 |
8,5 |
4,0 |
25 |
100 |
0,25 |
53,5 |
13,375 |
425 |
44,5 |
1,4 |
|
9 |
0,2 |
43 |
8,6 |
4,0 |
22 |
88 |
0,25 |
54,5 |
13,625 |
350 |
36,6 |
1,5 |
|
10 |
0,2 |
42 |
8,4 |
4,0 |
20 |
80 |
0,25 |
52 |
13 |
300 |
31,4 |
1,6 |
|
11 |
0,2 |
35 |
7 |
4,0 |
16 |
64 |
0,25 |
44 |
11 |
225 |
23,6 |
1,7 |
|
12 |
0,2 |
22 |
4,4 |
4,0 |
10 |
40 |
0,25 |
27 |
6,75 |
130 |
13,6 |
1,9 |
|
13 |
0,2 |
12 |
2,4 |
4,0 |
5 |
20 |
0,25 |
13 |
3,25 |
70 |
7,3 |
2,0 |
|
Lp. |
I |
U |
M |
n |
ω |
k |
UWAGI |
||||||
|
st |
α |
[A] |
st |
α |
[V] |
st |
α |
[Nm] |
obr |
rad/s |
- |
|
1 |
0,2 |
10 |
2 |
4,0 |
55 |
220 |
0,25 |
9 |
2,25 |
1250 |
130,8 |
1,5 |
Rh1=0,51
Iek=2,5 [A] |
2 |
0,2 |
11 |
2,2 |
4,0 |
50 |
200 |
0,25 |
10 |
2,5 |
1150 |
120,4 |
1,5 |
|
3 |
0,2 |
12 |
2,4 |
4,0 |
42 |
168 |
0,25 |
12 |
3 |
950 |
99,4 |
1,4 |
|
4 |
0,2 |
13,5 |
2,7 |
4,0 |
35 |
140 |
0,25 |
14,5 |
3,625 |
750 |
78,5 |
1,3 |
|
5 |
0,2 |
16 |
3,2 |
4,0 |
29 |
116 |
0,25 |
17 |
4,25 |
625 |
65,4 |
1,3 |
|
6 |
0,2 |
17 |
3,4 |
4,0 |
26 |
104 |
0,25 |
20 |
5 |
510 |
53,4 |
1,3 |
|
7 |
0,2 |
19 |
3,8 |
4,0 |
22 |
88 |
0,25 |
22 |
5,5 |
430 |
45,0 |
1,4 |
|
8 |
0,2 |
20,5 |
4,1 |
4,0 |
20 |
80 |
0,25 |
24 |
6 |
375 |
39,3 |
1,4 |
|
9 |
0,2 |
22 |
4,4 |
4,0 |
17,5 |
70 |
0,25 |
26 |
6,5 |
310 |
32,4 |
1,5 |
|
10 |
0,2 |
22 |
4,4 |
4,0 |
15 |
60 |
0,25 |
26,5 |
6,625 |
250 |
26,2 |
1,5 |
|
11 |
0,2 |
21,5 |
4,3 |
4,0 |
13 |
52 |
0,25 |
25,5 |
6,375 |
220 |
23,0 |
1,5 |
|
12 |
0,2 |
19,5 |
3,9 |
4,0 |
11 |
44 |
0,25 |
22,5 |
5,625 |
175 |
18,3 |
1,7 |
|
13 |
0,2 |
16,5 |
3,3 |
4,0 |
9 |
36 |
0,25 |
19 |
4,75 |
130 |
13,6 |
1,8 |
|
14 |
0,2 |
12 |
2,4 |
4,0 |
6 |
24 |
0,25 |
12 |
3 |
80 |
8,4 |
2,3 |
|
15 |
0,2 |
7 |
1,4 |
4,0 |
3 |
12 |
0,25 |
6 |
1,5 |
30 |
3,1 |
3,6 |
|
Lp. |
I |
U |
M |
n |
ω |
k |
UWAGI |
||||||
|
st |
α |
[A] |
st |
α |
[V] |
st |
α |
[Nm] |
obr |
rad/s |
- |
|
1 |
0,2 |
36 |
7,2 |
4,0 |
55 |
220 |
0,25 |
43 |
10,75 |
1225 |
128,2 |
1,1 |
Rh1=1,02
Iek=3,9 [A] |
2 |
0,2 |
38 |
7,6 |
4,0 |
51 |
204 |
0,25 |
47 |
11,75 |
1085 |
113,6 |
1,2 |
|
3 |
0,2 |
40,5 |
8,1 |
4,0 |
47 |
188 |
0,25 |
49 |
12,25 |
1000 |
104,7 |
1,2 |
|
4 |
0,2 |
43,5 |
8,7 |
4,0 |
43,5 |
174 |
0,25 |
52 |
13 |
915 |
95,8 |
1,2 |
|
5 |
0,2 |
44,5 |
8,9 |
4,0 |
39 |
156 |
0,25 |
54 |
13,5 |
780 |
81,6 |
1,3 |
|
6 |
0,2 |
45 |
9 |
4,0 |
35 |
140 |
0,25 |
55 |
13,75 |
650 |
68,0 |
1,3 |
|
7 |
0,2 |
44 |
8,8 |
4,0 |
32 |
128 |
0,25 |
54 |
13,5 |
615 |
64,4 |
1,3 |
|
8 |
0,2 |
41 |
8,2 |
4,0 |
29 |
116 |
0,25 |
50 |
12,5 |
530 |
55,5 |
1,4 |
|
9 |
0,2 |
35 |
7 |
4,0 |
24 |
96 |
0,25 |
43 |
10,75 |
430 |
45,0 |
1,4 |
|
10 |
0,2 |
30 |
6 |
4,0 |
20 |
80 |
0,25 |
36 |
9 |
370 |
38,7 |
1,4 |
|
11 |
0,2 |
22 |
4,4 |
4,0 |
15 |
60 |
0,25 |
26 |
6,5 |
255 |
26,7 |
1,5 |
|
12 |
0,2 |
14 |
2,8 |
4,0 |
10 |
40 |
0,25 |
15 |
3,75 |
165 |
17,3 |
1,7 |
|
13 |
0,2 |
7 |
1,4 |
4,0 |
5 |
20 |
0,25 |
6 |
1,5 |
80 |
8,4 |
2,2 |
|
4. PRZYKŁADOWE OBLICZENIA
Iek = In/0,816 = 3,9 [A]
ω = (2*Π*n)/60 = (Π*n)/30 = 3,14*1225/30 = 128,2
k = (U_*I_)/M*ω = 220*7,2/10,75*128,2 = 1,149 ≈1,1
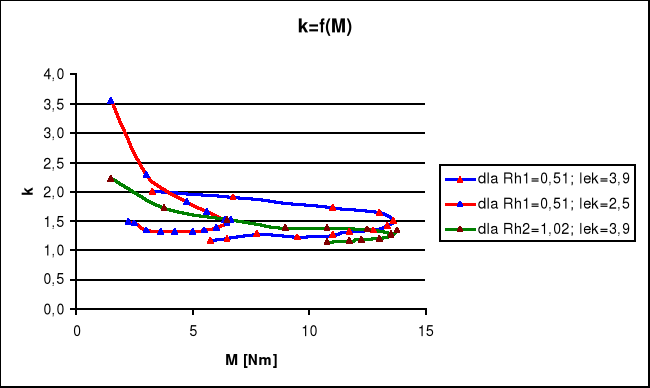
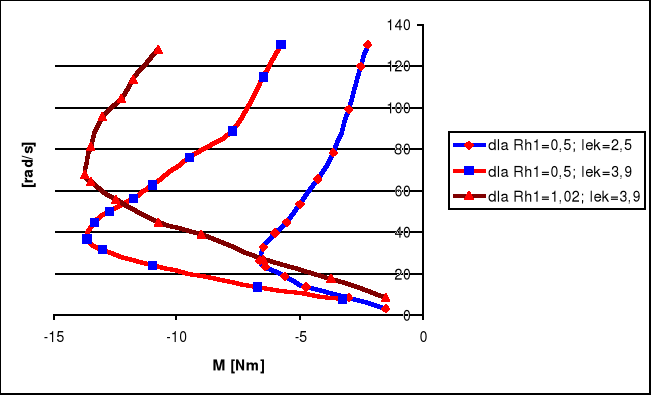
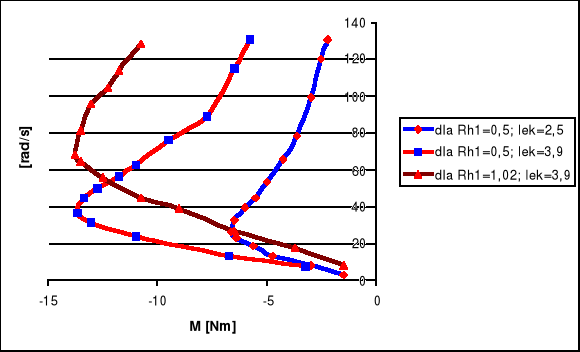
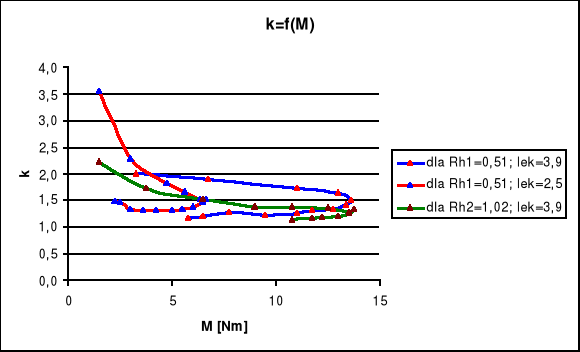
5.Uwagi i wnioski.
Badanie układów regulowanego hamowania silników indukcyjnych przeprowadziliśmy przy dwóch wartościach prądu Iek (2,5A i 3,9A) oraz dla dwóch wartości rezystancji Rh1 (0,51Ω i 1,02Ω) włączonych poprzez pierścienie ślizgowe do obwodu wirnika. Na podstawie przeprowadzonych pomiarów wykreslilismy charakterystyki mechaniczne (umieszczone poniżej). Na ich podstawie zauważamy, iż jestesmy w stanie regulować prędkosć krytyczną maszyny za pomocą zmian wartosci rezystancji umieszczonej w obwodzie wirnika(taki sposób regulacji prędkosci obrotowej zapewnia nam jej płynny zakres regulacji). Należy tutaj podkreslić iż rezystancję możemy przyłączyć tylko do silników pierścieniowych. Tak więc dochodzimy do wniosku iż: różna wartość rezystancji wpływa na względną prędkość krytyczną, natomiast Mk =const. W przypadku zmiany wartości prądu stałego prędkość krytyczna νk=const. natomiast zmianie ulega moment krytyczny M.k. Dla stałej wartości rezystancji R=1,02Ω, prądów 2,5A i 3,9A moment krytyczny wynosił ok. 13,75Nm (wartosć maksymalna).
Wyszukiwarka
Podobne podstrony:
stany awaryjne, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elektrryczny lab,
napęd roz, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elektrryczny lab, od ch
sprawko 2 izy, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, metody numeryczne, lab 2
Badanie uk-. kaskadowych, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elektrry
napędyELEKTR(ćw.31), Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elektrryczny
met3Robaka, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, metody numeryczne, lab 3 int
GB napŕd, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elektrryczny lab, od chl
BADANIE INDUKCYJNEGO SILNIK, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elekt
napŕd 1, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elektrryczny lab, od chlo
Napd1, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elektrryczny lab, od chlopa
Zastos. sterownikw w napdzie elektr, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, nap
spraw, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elektrryczny lab, od chlopa
sprawko 3 interpolacja, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, metody numeryczn
więcej podobnych podstron