1.Narysować ogólny schemat układu automatyki, nazwać elementy i sygnały.
2. Różnica pomiędzy otwartym układem sterowania, a układem regulacji automatycznej (układem automatyki).
Sterowanie w ukł. otwartym- układ, w którym sygnał wejściowy nie zależy od aktualnej wartości sygnału wyjściowego, ponieważ nie występuje sprzężenie zwrotne, a wynika jedynie z wewnętrznego stanu obiektu. Przebieg sygnału następuje tylko w jednym kierunku, od wejścia do wyjścia. Innymi słowy w układzie nie ma połączenia między wyjściem a wejściem układu. Układ otwarty, jest uproszczonym układem sterowania w stosunku do układu regulacji (układu zamkniętego). Jest to ukł. w którym wymagana jest obecność człowieka. Człowiek uczestniczący w tym procesie musi mieć tak zwany wzorzec, z którego stale będzie porównywał sygnał Wy
Sterowanie w ukł. zamkniętym - jest to układ posiadający sprzężenie zwrotne. Działanie takiego układu sprowadza się do tego, że gdy następuje zmian sygnału WY, którego wartość dąży do zrównania z wielkością zadaną, to przez sprzężenie zwrotne układ jest w stanie sam skompensować zakłócenia i powrócić do stanu równowagi.
w otwartym ukł. sterowania nie ma sprężenia zwrotnego, jest potrzebny człowiek, w ukł. regul. automat.- ma sprężenie zwrotne, potrafi działać samodzielnie
3. Na podst. schematu wyjaśnić co to jest sprzężenie zwrotne i jak jest ono wykorzystywane w układzie automatyki?
Idea sprzężenia zwrotnego polega na tym, że sygnał WY układu jest kierowany z powrotem na wejście. Daje to możliwość kontrolowania wyjścia i oddziaływania na wejście w zależności co dzieje się na wyjściu. Następuje porównanie sygnału We i Wy, a różnica tych sygnałów stanowi sygnał uchybu e(t) przetwarzany przez urządzenie sterujące na sygnał sterujący u(t) o takiej wartości , aby sprowadzić sygnał uchybu e(t) do zera.
4. Jakie dodatkowe elementy występują na schemacie cyfrowego ukł. autom. i jakie są ich zadania?
Cyfrowy ukł. Automatyki - ukł, w którym regulator jest urządzeniem cyfrowym. Na wejściu i wyjściu ma sygnał cyfrowy. Obiekt jest elemnetem analogowym.
A/C - przetwornik analogowo-cyfrowy, próbkuje sygnał analogowy ( odczytuje tylko w określonych chwilach). Sygnał musi odpowiadać podziałowi na odpowiednią ilość części.
C/A - przetwornik cyfrowo-analogowy, z ciągu impulsów odzyskuje sygnał analogowy.
5. Jaki jest cel wprowadzania w maszynach i urządzeniach technicznych układów automatyki.
- zastąpienie człowieka w sterowaniu takimi układami, które człowiek jest w stanie obsłużyć, lecz są one niebezpieczne i jest to uciążliwe
-umożliwienie sterowania wtedy, gdy człowiek nie jest w stanie sterować ręcznie.
6. Jaki układ autom. nazywamy ukł. liniowym i jego najważniejsze cechy?
Układy liniowe - nazywamy takie ukł. automatyki które mają liniowe charakterystyki statyczne oraz zależność między ustalonymi wartościami sygnału We i Wy jest liniowa. Najważniejsza cechą ukł. liniowego jest to ze spełnia zasadę superpozycji. Zasada superpozycji jeżeli na układ działa wiele wymuszeń jednocześnie to odpowiedź układu stanowi sumę odpowiedzi na każde z wymuszeń rozpatrywanych oddzielnie (przy założeniu, że pozostałe nie oddziałują).
7. Układy regulacji stałowartościowej (stabilizującej) - sygnał sterujący ma stała wartość x0= const. W procesie regulacji układ ma za zadanie utrzymać stała wartość sygnału regulowanego y równą x0mimo działających zakłóceń. Przykład: klimatyzacja utrzymująca stałą wartość temperatury w pomieszczeniu.
8. Układ regulacji programowej - jest to szczególny przypadek układu nadążnego. Sygnał sterujący zmienia się wg pewnego programu, określonego nadaną z góry funkcją czasu. np. układ regulacji programowej regulacji temperatury w piecach hutniczych.
9. Układy nadążne - to zamknięte układy sterowania, sygnał sterujący x0 jest nieznaną funkcją czasu. Zmiany sygnału sterującego x0 nie zależą od procesu zachodzącego wewnątrz układu automatycznej regulacji, ale są wywołane sa zjawiskami zachodzącymi poza układem regulacji (radarowy ukł. nadążny) np. układ sterowania ogniem artylerii przeciwlotniczej wg wskazań radarom.
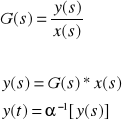
10.Podaj definicje Transmitancją operatorową G(s) elementu lub układu nazywamy stosunek transformaty wielkości wyjściowej y(s) do transformaty wielkości wejściowej x(s) przy zerowych warunkach początkowych. G(s)=y(s)/x(s)
11.Charakterystyka statyczna -przedstawia zależność wielkości wyjściowej do wielkości wejściowej w stanie ustalonym. Można ja wyznaczyć z równania różniczkowego nieliniowego lub zlinearyzowanego porównując wszystkie pochodne do zera. Jeżeli charakterystyka statyczna została wyznaczona na podstawie zlinearyzowanego to obowiązuje ona jedynie w otoczeniu punktu pracy układu i tylko w tym punkcie pokrywa się z charakterystyką wyznaczoną na podstawie równania nieliniowego. Zgodność tych charakterystyk nastąpi wówczas gdy charakterystyka określona z nieliniowego równania różniczkowego jest liniowa.
12. Podać algorytm wyznaczania odpowiedzi elementu lub układu automatyki o danej transmitancji operatorowej na zakłócenia dane przebiegiem czasowym
![]()
13. W jaki sposób wyznaczyć zastępczą transmitancję dla połączeń: szeregowego i ze sprzężeniem zwrotnym?
szeregowe Gz=G1*G2*G3*...*Gn ( mnożymy)
sprzężenie zwrotne :
14. W jaki sposób wyznaczyć zastępczą transmitancję dla połączeń: równoległego i ze sprzężeniem zwrotnym?
równoległe :
Gz=G1+-G2+-G3+-...*Gn (sumujemy)
sprzężenie zwrotne :
![]()
15. Obiekt regulacji - to urządzenie, które polega na sterowaniu w układzie o sprzężeniu zwrotnym.
Wielkość regulowana - sygnał WY z obiektu, którego wielkością lub przebiegiem w czasie chcemy sterować
16. Na podstawie ogólnego schematu ukł. regul. autom. wyjaśnić co to jest uchyb i regulator.
Uchyb - dla schematu jest to różnica sygnałów zadanego oraz wyjściowego e(t)=x(t)-y(t)
Regulator - urządzenie sterujące które przetwarza wartość uchybu na sygnał sterujący obiektem w taki sposób aby wartość błędu ,uchybu sprowadzić możliwie do zera.
17. Zadania regulatora w ukł. autom.
Regulator wykonuje podstawową funkcje układu automatycznej regulacji. Przetwarza on bowiem sygnał błędu e(t) na odpowiedni sygnał, konieczny do wysterowania obiektu w sposób zapewniający przebieg procesu zgodny z przebiegiem pożądanym
lub doprowadzenie i utrzymywanie wartości sygnału wyjściowego równej sygnałowi zadanemu w określonym czasie, pośrednio sprowadzenie wartości uchybu do zera.
18. Podać transmitancję regulatora PID, określić jakie operacje wykonuje on na sygnale wejściowym i jaki to sygnał oraz wskazać jego parametry związane z poszczególnymi akcjami
Regulator PID - posiada wyjścia ciągłe:
- proporcjonalne P
- całkujące I
- Różniczkujące D
Znajduje on zastosowanie głównie do stałowartościowej regulacji przepływu prędkości, ciśnienia, napięcia itp.
Transmitancja operatorowa regulatora PID
Idealnego: G(s)PID=![]()
Rzeczywistego: G(s)PID=![]()
kp - współ. Wzmocnienia regulatora; Ti-stała czasowa całkująca; Td- stała czasowa różniczkowania T-stała czasowa
Właściwy dobór nastaw pozwala otrzymać żądaną wartość:
-statycznego błędu regulacji
-przeregulowania Cur
-czas regulacji Trr
Regulator P - nie eliminuje błędu statycznego, który zależy od wielkości wzmocnienia. Ta wielkość wpływa również na szybkość działanie oraz amplitudę sygnały WY, wzrost kp oznacza skrócenie czasu regulacji i wzrost amplitudy przebiegu wyjściowego
Regulator I - wyłącznie akcja całkująca; reaguje na wszelkie odchyłki sygnału regulowanego. Likwiduje do 0 błąd statyczny regulacji. Czas regulacji ulega wydłużeniu - zwiększenie wzmocnienia.
Regulator D - reaguje na każdą zmianę sygnału regulowanego , skraca czas regulacji, zmniejsza przeregulowanie.
Potrzebna jest charakterystyka obiektu i regulatora:
P: kp=0.5 kpkr
PI: kp=0.45 kpkr ; Ti= 0.85 Tosc
PID: kp=0.6 kpkr ; Ti = 0.5 Tosc , Td = 0,12 Tosc
19. Na podstawie transmitancji regulatora PID wyjaśnić w jaki sposób dysponując regulatorem PID możemy sprawić aby działał on jak regulator P
Transmitancja operatorowa regulatora PID
Idealnego: G(s)PID=![]()
Rzeczywistego: G(s)PID=![]()
Aby działał jak regulator P Td-min a Ti - max
20. Co nazywamy charakterystyką amplitudowo-fazową elementu lub układu automatyki i w jaki sposób możemy określić wzmocnienie i przesunięcie fazowe dla danej wartości pulsacji?
Charakterystyką amplitudowo-fazową nazywamy graficzne przedstawienie (wykres) transmitancji widmowej układu.
Moduł transmitancji widmowej określa wzmocnienie, a ![]()
określa kąt przesunięcia.
21. Dla częstości sygnału wejściowego równej 2 wzmocnienie układu wynosi 5, a przesunięcie fazowej π/4. Jeśli sygnał wejściowy określony jest zależnością x(t)= 4 sin 2t, to jaką zależnością będzie określony sygnał wyjściowy po dostatecznie długim czasie? Uzasadnić? 
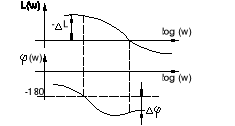
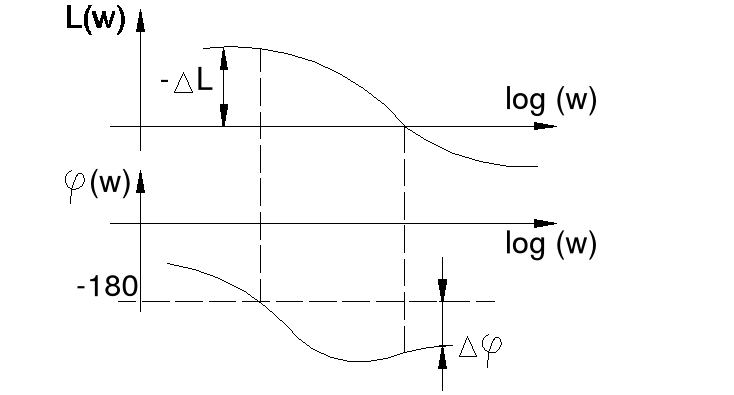
22. Jakie charakterystyki częstotliwościowe elementu lub układu automatyki nazywamy charakterystykami logarytmicznymi i do czego są one wykorzystywane?
Zależność argumentu transmitancji widmowej φ (ω) wykreślona w logarytmicznej skali pulsacji ω nazywa się charakterystyką logarytmiczną fazową, a zależność 20log10|G (jω)| wykreślona w logarytmicznej skali pulsacji ω nazywa się logarytmiczną charakterystyką amplitudową. Zasadniczą zaletą charakterystyk logarytmicznych jest łatwość określania charakterystyki wypadkowej układów, których transmitancje stanowią iloczyn transmitancji członów składowych. Umożliwia to zastąpienie mnożenia transmitancji łatwiejszą operacją matematyczną - sumowaniem.
23. Sposób wyznaczania częstotliwościowych charakterystyk logarytmicznych ukl. elementów połączonych szeregowo.
Charakterystyki logarytmiczne jeśli są szeregowo połączone to je sumujemy.
24. Co to jest stabilność układu i dlaczego ta stabilność decyduje o jego przydatności?
Układ jest stabilny, gdy powraca do stanu równowagi po ustaniu zakłócenia, które spowodowało wytrącenie go ze stanu równowagi. Stabilność jest niezbędną własnością aby układ mógł bezpiecznie pracować.
Rozpatrując pierwiastki równania charakterystycznego charakterystyki i ich wpływ na czynnik est przy t →∞ można stwierdzić, że dla układu stabilnego pierwiastki leżą w lewej półpłaszczyźnie płaszczyzny pierwiastków (liczb zespolonych), stąd kryterium stabilności
25. Włączamy układ stabilizacji temp. z regulatorem PID. Jak zmienia się uchyb w tym układzie, jeśli ukł. będzie stabilny i niestabilny?
Stabilny- uchyb będzie maleć ,wróci do stanu równowagi
Niestabilny- uchyb będzie rósł, nie wróci do stanu równowagi
26.Ogólny warunek stabilności(na prostym przykładzie).
![]()
27.Kryterium Hurwitza
![]()
1. istnieją wszystkie współczynniki równania i mają ten sam znak: a0>0,a1>0...an>0
2. wszystkie podwyznaczniki i wyznacznik główny muszą być większe od zera:
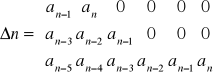
oraz Δn >0.
28. Jakie wielkości wykorzystuje się do oceny jakości regulacji na podstawie przebiegów czasowych?
- błąd (odchyłka) statystyczna -jest to różnica pomiędzy wartością zadaną a wartością wyjściową w stanie ustalonym;
-przeregulowanie - mówi nam jak zanika uchyb w czasie( w pytaniu następnym więcej)
- czas regulacji - czas od momentu wprowadzenia zakłócenia, Niekiedy czas reg. definiuje się jako czas trwania przebiegu przejściowego, tzn przyjmuje się, że ukł. wytrącony z równowagi przez zakłócenie zewnętrzne osiągnie ponownie stan ustalony po czasie tr
29. Na podstawie przykładowego przebiegu uchybu wyjaśnić, co nazywamy przeregulowaniem
Przeregulowanie χ definiuje się wzorem
Gdzie em - to odchylenie maksymalne regulacji
![]()
Im silniej tłumione są przebiegi oscylacyjne, tym mniejsza jest wartość przeregulowania. Przeregulowanie rośnie w miarę zbliżania się do granicy stabilności, aby osiągnąć 100% na tej granicy.
Czas regulacji - pytanie 29
30.W ukł regulacji temperatury wartość zadana wynosiła 520K, zaś ustalona wartość temp wyniosła 500K. Czy wystąpiła tu odchyłka statyczna?a jeśli tak to ile ona wynosi?,
jest odchyłka statyczna wynosząca 20 K
31. Na czym polega ocena jakości układu automatyki z wykorzystaniem kryteriów całkowych?
32.Na czym polega dobór parametrów regulatora na podstawie kryteriów całkowych?
przyjmujemy całkę i dobieramy tak nastawy regulatora, aby całka miała jak najmniejszą wartość
33.Na czym polega dobór parametrów regulatora metody Zieglera-Nicholsa
Dobór nastaw regulatorów wymaga czynności:
1)nastawienia regulatora tylko na działanie P (Ti=Ti max, Td=Tdmin)
2)zwiększenie kP aż do kPkr. Doprowadzamy ukł. aby na wyjściu były sygnały niegasnące, ważne są tu kPkri Tosc.Na podstawie ustalonego kPkri Tosc mozna wyznaczyć wartość nastawy dla poszczególnych regulatorów z zależności:
P:kP=0.5kpkr
P1:kp=0,45 kpkr ; Ti=0,85 TOSC
PID:TP=0,6 kPKR ; Ti=0,5, T=0.12 TOSC
34. Jaki element pełni rolę regulatora w układzie regulacji dwustawnej i na czym polega jego działanie?
Rolę regulatora pełni przekaźnik dwupołożeniowy, a jego działanie polega na okresowym włączaniu i wyłączaniu jakiegoś urządzenia wykonawczego.
35. Jak możemy rozpoznać na podstawie przebiegu wielkości regulowanej w stanie quasi ustalonym, że w układzie regulacji, np. temperatury zastosowano regulator dwupołożeniowy a nie np. regulator PID?
wartość regulatora stale oscyluje wokół wielkości a PID ustawi się na stałym poziomie.
36. W układzie regulacji dwustawnej temperatury obiektem jest element inercyjny I rzędu, zaś przekaźnik ma histerezę o szerokości +/-20oC. Ile wyniesie amplituda oscylacji ustalonych?
Jeśli obiekt nie ma opóźnienia oscylacje zachodzą w pętli histerezy. Amplituda oscylacji = 20
Jeśli obiekt ma opóźnienia oscylacje zachodzą poza szerokością pętli histerezy.
37. W jaki sposób można zmniejszyć amplitudę drgań ustalonych wielkości regulowanej w układzie regulacji dwustawnej z regulatorem z histerezą i jak wówczas zmieniać się będzie częstotliwość przełączeń przekaźnika?
Aby zmniejszyć amplitudę oscylacji należy zmniejszyć pętlę histerezy, skutkuje zwiększeniem częstotliwości przełączeń przekaźnika.
2
![]()
![]()
Wyszukiwarka
Podobne podstrony:
8410
8410
8410
8410
8410
8410
8410
więcej podobnych podstron