Data wykonania ćwiczenia: 21.11.2011r. |
WPROWADZENIE DO MECHATRONIKI - LABORATORIUM |
Data oddania sprawozdania: 05.12.2011r. |
|
Wykonali: Dressler Marek Koza Damian Szarata Adam |
Prowadzący: mgr. T. Podolski |
Uwagi: |
Ocena: |
Temat: Badanie charakterystyki silnika krokowego |
|||
Silnik krokowy
Silnik krokowy- jest sterowanym cyfrowo napędem stosowanym do precyzyjnego pozycjonowania. Jego budowa umożliwia łatwą kontrolę kąta oraz prędkości obrotowej. Cechą charakterystyczną silnika krokowego jest stały pobór prądu podczas postoju silnika. W konsekwencji może on utrzymać rotor w określonej pozycji z pełnym momentem trzymającym wydzielając przy tym jednak znaczne ilości ciepła.
Budowa silnika krokowego- silnik krokowy składa się z rotora i stojana. To właśnie te dwa elementy odpowiedzialne są za jego rotacyjną pracę. Silniki krokowe działają dzięki odpychaniu i przyciąganiu elektrycznie wytwarzanych biegunów magnetycznych wewnątrz silnika. W silnikach o zmiennej reluktancji na stojanie znajdują się uzwojenia przez które płynie prąd wywołując powstanie pól magnetycznych. Rotor natomiast wykonany jest ze stali miękkiej magnetycznie. Ruch powstaje gdy zęby rotora przyciągane są przez bieguny stojana.
Schemat stanowiska.
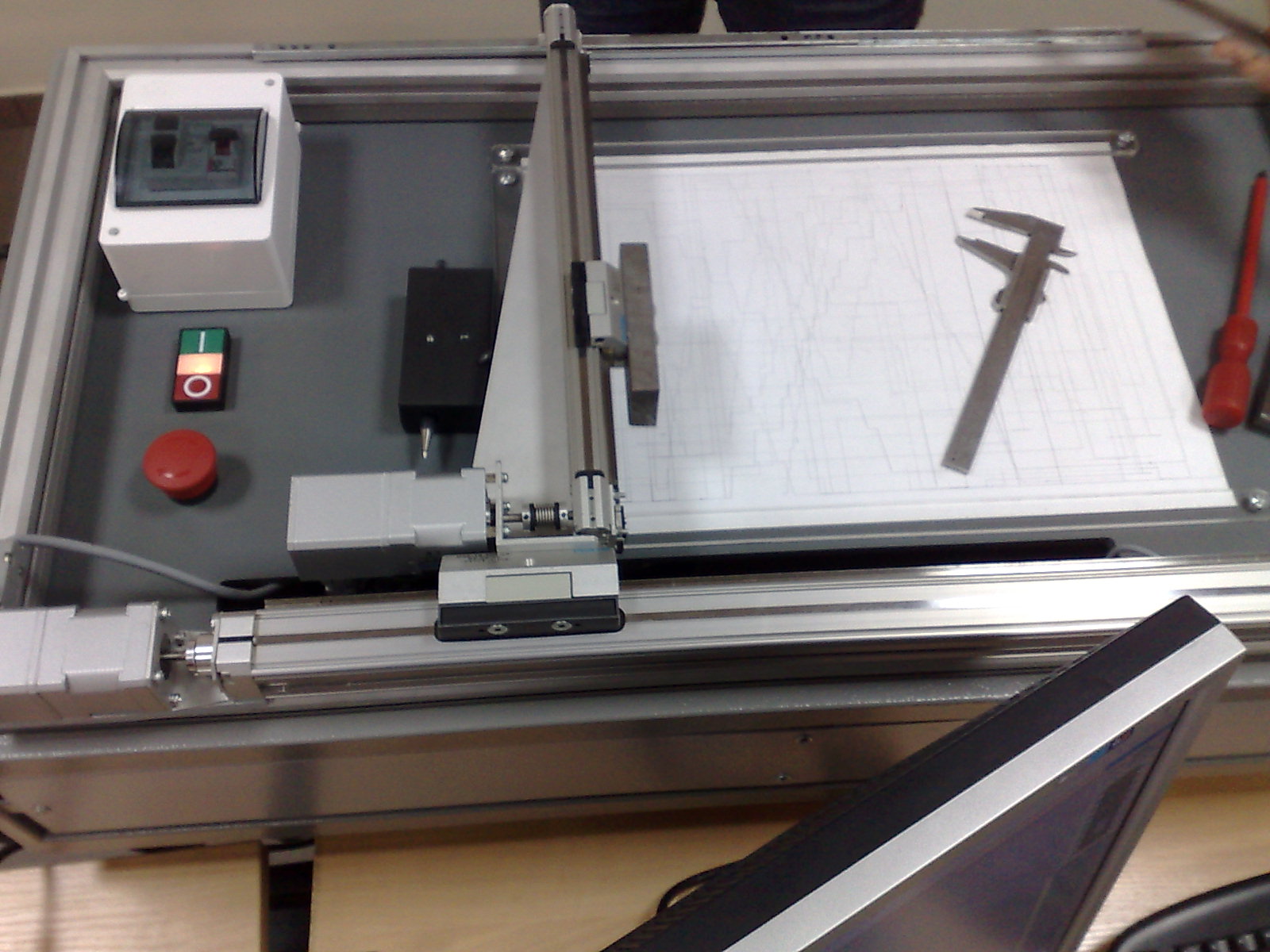
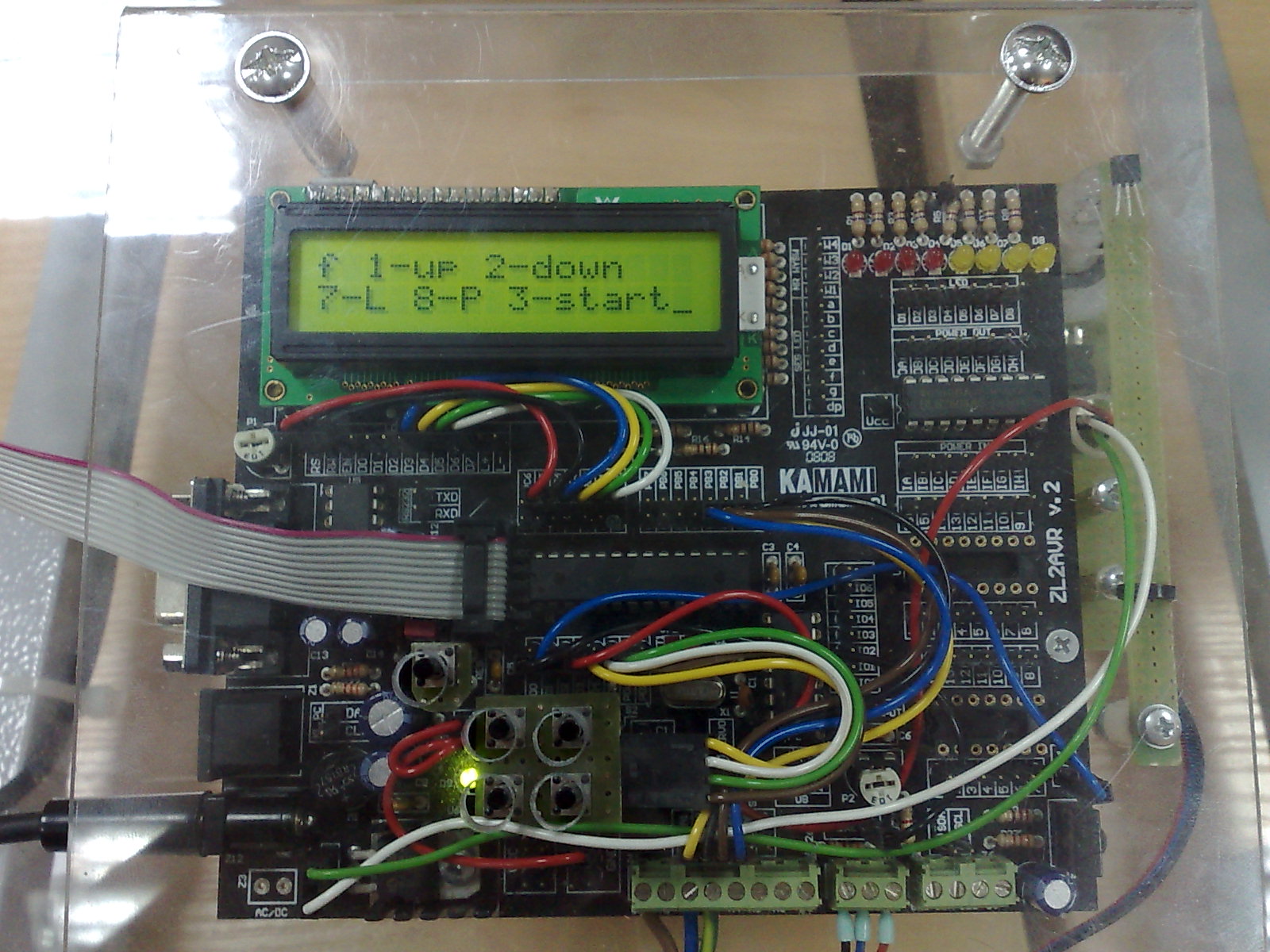
Pilot
Sterownik Ploter
3. Przebieg ćwiczenia.
1. Za pomocą układu sterującego wysyłamy sygnał do silnika krokowego. Początkowa częstotliwość wynosi 100 Hz.
2. Silnik krokowy zmienia swoją pozycję.
3. Przebyta przez silnik krokowy odległość jest mierzona za pomocą suwmiarki.
4. Jeżeli odległość przebyta przez silnik krokowy wynosi 8 mm +/- błąd pomiarowy, zmieniamy częstotliwość sygnału o 100 Hz.
5. Jeżeli przebyta odległość przyjmuje inną wartość, następuje powtórzenie pomiaru, w celu uniknięcia błędu.
6. Po wykonaniu powtórzenia, następuje sprawdzenie wyniku. Jeżeli on również przyjmuje inną wartość następuje zmienianie częstotliwości co 10 Hz w górę, bądź w dół, w celu znalezienia
częstotliwości granicznej.
7.Po znalezieniu częstotliwości granicznej, następuje zwiększenie obciążenia na silniku krokowym, oraz powrót do punktu 1.
4. Wyniki pomiarów.
BEZ OBCIĄZENIA
Położenie początkowe: 238,20(mm) |
||||
Częstotliwość (Hz) |
Położenie (mm) |
Zmiana położenia (mm) |
Uwagi |
|
100 |
246,20 |
8 |
|
|
200 |
254,15 |
7,95 |
|
|
300 |
262,20 |
8,05 |
|
|
400 |
270,15 |
7,95 |
|
|
500 |
278,15 |
8 |
|
|
600 |
286,05 |
7,9 |
|
|
600 |
294,00 |
7,95 |
|
|
700 |
302,05 |
8,05 |
|
|
800 |
310,05 |
8 |
|
|
900 |
318,05 |
8 |
|
|
1000 |
326,00 |
7,95 |
|
|
Zmiana kierunku ruchu. |
||||
1100 |
318,00 |
8 |
|
|
1200 |
310,00 |
8 |
|
|
1300 |
302,00 |
8 |
|
|
1400 |
294,00 |
8 |
|
|
1500 |
286,00 |
8 |
|
|
1600 |
278,10 |
7,9 |
Zgubienie kroku |
|
1550 |
270,10 |
8 |
|
|
1560 |
262,10 |
8 |
Częstotliwość graniczna |
|
1570 |
254,00 |
8,1 |
Zgubienie kroku |
|
1580 |
246,10 |
7,9 |
Zgubienie kroku |
|
Z MAŁYM OBCIĄŻENIEM
0,084 × 0,042 × 0,0115 = 0,000040572(m3)
0,000040572m3 × 7850kg/m3 = 0,3184902kg
Położenie początkowe: 238,2(mm) |
|||
Częstotliwość (Hz) |
Położenie (mm) |
Zmiana położenia (mm) |
Uwagi |
1200 |
230,20 |
8 |
|
1300 |
222,15 |
7,95 |
|
1400 |
214,20 |
8,05 |
|
1500 |
206,20 |
8 |
|
1600 |
198,20 |
8 |
|
1700 |
191,50 |
6,7 |
Zgubienie kroku |
1650 |
184,80 |
6,7 |
Zgubienie kroku |
1620 |
178,05 |
6,75 |
Zgubienie kroku |
1610 |
170,10 |
7,95 |
Częstotliwość graniczna |
|
|
|
|
Z DUŻYM OBCIAŻENIEM
|
|
|
|
Położenie początkowe: 170,10 |
|||
Częstotliwość (Hz) |
Położenie (mm) |
Zmiana położenia (mm) |
Uwagi |
1500 |
178,10 |
8 |
|
1600 |
184,10 |
6 |
Zgubienie kroku |
1600 |
193,40 |
9,3 |
Zgubienie kroku |
1600 |
202,80 |
9,4 |
Zgubienie kroku |
1520 |
211,40 |
8,4 |
Zgubienie kroku |
1510 |
219,40 |
8 |
Częstotliwość graniczna |
WYKRES
5. Wnioski.
Silniki krokowe to sterowane cyfrowo napędy, służące do precyzyjnego pozycjonowania. Składają się z rotora i stojana. Działają dzięki odpychaniu i przyciąganiu elektrycznie wytwarzanych biegunów magnetycznych wewnątrz silnika. Ich cechą charakterystyczną jest stały pobór prądu podczas postoju silnika, dzięki czemu rotor utrzymywany jest w określonej pozycji. Dzięki łatwości kontroli, precyzji sterowania oraz niezawodności, są używane między innymi w motoryzacji, dyskach twardych, oraz urządzeniach pozycjonujących. Z ćwiczenia wynika że im wyższa częstotliwość, tym większe prawdopodobieństwo na zgubienie kroku. Obciążenie również zwiększa szansę na zgubienie kroku.
4
Wyszukiwarka
Podobne podstrony:
badanie silnika krokowego, mechanika, BIEM- POMOCE, automatyka i sterowanie
sprawko-badanie silnika(1), Semestr 5, Automatyzacja i robotyzacja procesu produkcji
Opis silnikow krokowych id 3370 Nieznany
Badanie silnika pradu stałego
Badanie silnika indukcyjnego jednofazowego
Trójfazowy silnik asynchroniczny sprawko
Kontroler silnika krokowego na porcie LPT3
ćw14 silnik stirlinga sprawko by pawelekm
Kontroler silnika krokowego na porcie LPT2
3 Silnik krokowy
Badanie silnika indukcyjnego trójfazowego
badanie silnika dwufazowego malej mocy
Badanie silnika klatkowegoNASZE
BADANIE WIDM SPEKTROSKOPOWYCH sprawko W4
ćw14-silnik stirlinga-sprawko by pawelekm, Energetyka AGH, semestr 5, semestr V, Konwersja Energii,
Badanie silnika indukcyjnego klatkowego
więcej podobnych podstron