Politechnika Rzeszowska im. Ignacego Łukasiewicza
Wydział Elektrotechniki i Informatyki
Teoria obwodów
Projekt
Zaprojektować filtr dolnoprzepustowy Czebyszewa
Konsultował: Wykonali:
dr inż. Grzegorz Masłowski Łukasz Januszewski
Prof. PRZ Tomasz Gałecki
Główne cele
Głównie cele
Poznanie wiadomości dotyczących filtrów
Projekt filtru cyfrowego
Określenie parametrów filtru cyfrowego
Wyznaczenie pulsacji granicznych filtru analogowego
Wyznaczenie parterów unormowanego dolnoprzepustowego filtru analogowego
Projektowanie prototypowego filtru dolnoprzepustowego Czebyszewa
Wyznaczenie rzędu N filtru
Obliczenie biegunów filtru prototypowego
Wyznaczenie transmitancji filtru prototypowego
- Dokonanie transformacji częstotliwości filtru prototypowego
- Wyznaczenie charakterystyk częstotliwościowych i czasowych
Wyznaczenie transmitancji filtru cyfrowego
Wyznaczenie charakterystyk częstotliwościowych i odpowiedzi impulsowej
Wnioski i spostrzeżenia
WSTĘP TEORETYCZNY
Filtry aktywne są stosowane we wszystkich dziedzinach elektrotechniki . Mają spełniać zadania podobne do zadań filtrów pasywnych . Użycie elementów aktywnych pozwala zrezygnować z cewek indukcyjnych , sprawiających wiele uciążliwości . Można w związku z tym budować układy lżejsze i o lepszych własnościach elektrycznych .Należy jednak zwrócić uwagę na stabilność , ponieważ mogą generować szkodliwe drgania . Przyczyną ich są zazwyczaj niewielkie zmiany
parametrów , spowodowane na przykład warunkami zewnętrznymi ( np. zmiany temp. )
Filtry aktywne różnią się od filtrów pasywnych występowaniem źródeł sterowanych oraz pracą przy w miarę dowolnym (niekoniecznie dopasowanym) obciążeniu . Opis filtrów aktywnych można ograniczyć do filtrów dolnoprzepustowych , ponieważ można je za pomocą transformacji częstotliwości
Przekształcić w filtry górnoprzepustowe , pasmowoprzepustowe oraz pasmowozaporowe .
Problem syntezy transmitancji filtrów aktywnych można rozwiązać za pomocą połączenia łańcuchowego układów pierwszego i drugiego rzędu . W syntezie dowolnej impedancji , będącej funkcją wymierną , wystarczy rozłożyć ją na iloczyn funkcji wymiernych elementarnych i każdy czynnik zrealizować za pomocą czwórnika aktywnego . Zastosowanie czwórników aktywnych zapewnia spełnienie warunku wzajemnego nieobciążania się sekcji połączenia łańcuchowego .
Charakterystyki częstotliwościowe można optymalizować z różnych teoretycznych punktów widzenia . Z takich przesłanek optymalizacyjnych wynikają określone wartości współczynników ai i bi . Powstają przy tym sprzężone bieguny zespolone , których nie można zrealizować za pomocą biernych układów RC . Uzyskanie sprzężonych biegunów zespolonych staje się możliwe w wyniku zastosowania układów LRC . W zakresie częstotliwości dużych realizacja żądanych indukcyjności nie sprawia żadnych trudności , natomiast w zakresie małych częstotliwości przeważnie są potrzebne duże indukcyjności , które są bardzo niewygodne i mają złe własności elektryczne . Można jednak uniknąć stosowania takich indukcyjności dla zakresu częstotliwości małych , jeżeli do układów RC doda się elementy aktywne ( wzmacniacze operacyjne ) .Takie układy określa się mianem filtrów aktywnych .
Ogólna postać charakterystyki częstotliwościowej filtru dolnoprzepustowego przedstawia się następująco :
![]()
(1.1)
gdzie bi może być równe 0 , ai , bi rzeczywiste
Rząd filtru jest równy najwyższej potędze S . Dla realizacji filtru jest korzystne , aby wielomian dawał się rozłożyć na czynniki . Jeśli dopuszcza się również składniki zespolone , wtedy nie jest możliwe rozłożenie na czynniki liniowe i otrzymuje się iloczyn wyrażeń kwadratowych .
1. PORÓWNANIE ZOPTYMALIZOWANYCH CHARAKTERYSTYK FILTRÓW
AKTYWNYCH
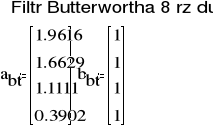
Charakterystyka częstotliwościowa filtrów dolnoprzepustowych Butterwortha przebiega w znacznym zakresie poziomo załamując się ostro dopiero przed osiągnięciem częstotliwości granicznej . Odpowiedź skokowa charakteryzuje się znacznymi drganiami , które rosną wraz ze wzrostem rzędu filtru .
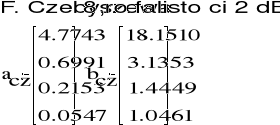
Najbardziej stromy spadek wzmocnienia powyżej częstotliwości granicznej ma filtr dolnoprzepustowy Czebyszewa .Jednakże przebieg wzmocnienia w zakresie częstotliwości przenoszonych nie jest monotoniczny ; występuje tu pewne zafalowanie . Drgania w odpowiedzi skokowej filtru są jeszcze większe niż w przypadku filtru Butterwotha .
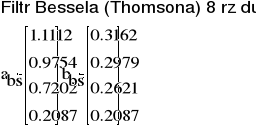
Optymalną odpowiedź skokową ma filtr dolnoprzepustowy Bessla . Obowiązuje przy tym założenie , opóźnienie ma wartość stałą w możliwie dużym zakresie częstotliwości , tzn. że dla zakresu częstotliwości przesunięcie fazowe jest proporcjonalne do częstotliwości . Zauważmy jednak , że charakterystyka częstotliwościowa filtru Bessla nie ma takiego ostrego załamania jak ma to miejsce w przypadku filtrów Butterwortha czy Czebyszewa .
Przykładowe charakterystyki filtrów dolnoprzepustowych Czebyszewa , Butterwortha , Bessla :
![]()
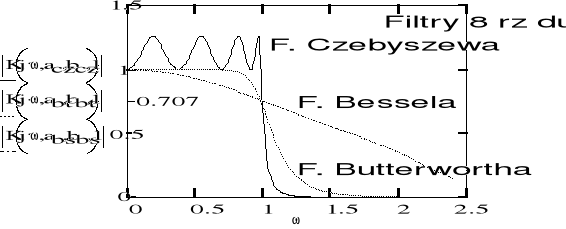
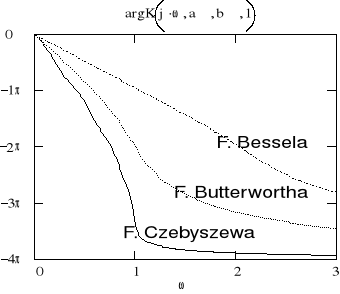
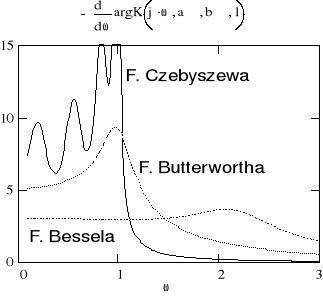
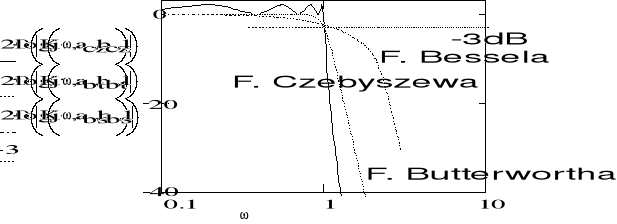
Łatwo zauważyć , że najbardziej strome przejście od pasma przepustowego do pasma tłumieniowego ma filtr Czebyszewa . Okupuje się to zafalowaniem charakterystyki częstotliwościowej w paśmie przepustowym . Im mniejsze jest to zafalowanie , tym bardziej właściwości filtru Czebyszewa są podobne do właściwości filtru Butterwortha . Obydwa filtry charakteryzują się znacznymi oscylacjami w ich odpowiedzi skokowej . Filtry Bessla dają tylko minimalne drganie . Mimo ich niezbyt dobrej charakterystyki częstotliwościowej stosuje się je zawsze tam , gdzie jest wymagana optymalna odpowiedź na wymuszenie skokowe .
2. FILTRY DOLNOPRZEPUSTOWE CZEBYSZEWA
Przy małych częstotliwościach wzmocnienie filtrów dolnoprzepustowych Czebyszewa jest równe ku0 .To wzmocnienie zmniejsza się jednak już poniżej częstotliwości granicznej , zgodnie z określoną falistością daną z góry , Wielomiany wykazujące w pewnym zakresie stałą falistość są wielomiany Czebyszewa :
Tn(x) : cos(n arccosx) dla 0 ![]()
x ![]()
1 (1.2)
cos(n arccosh) dla x > 1
W zakresie 0 ![]()
x ![]()
1 wielomian ![]()
oscyluje między 0 i 1 a dla x > 1 rośnie monotonicznie . Dla uzyskania równania filtru dolnoprzepustowego z wielomianów Czebyszewa przyjmujemy
(1.3)
Stałą k dobiera się tak by dla x=0 kwadrat modułu funkcji przenoszenia ![]()
2 był równy ku02 tzn. dla n nieparzystych k=1 a dla n parzystych k=1+ε2 , gdzie współczynnik ε=<1 jest miarą falistości.
Z modułu wzmocnienia można wyliczyć wzmocnienie zespolone i stąd wyznaczyć współczynniki . Można bieguny wzmocnienia zespolonego obliczyć bezpośrednio z biegunów filtru Butterwortha . Stąd w wyniku obliczenia sprzężonych biegunów zespolonych otrzymuje się współczynniki ai i bi w równaniu (1.1) zgodnie z następującymi zależnościami :
Rząd n parzysty :
(1.4)
![]()
(1.5)
dla ![]()
Rząd n nieparzysty :
![]()
(1.6)
![]()
(1.7)
(1.8)
![]()
(1.9)
dla ![]()
![]()
przy czym ![]()
![]()
Jeśli otrzymane w ten sposób współczynniki ai i bi podstawimy do równania (1.1) to otrzymamy filtr Czebyszewa , w którym wartość S nie jest znormalizowana względem częstotliwości ωg( 3 dB ) , lecz względem częstotliwości ωc , przy której wzmocnienie przybiera po raz ostatni wartość ku min .
Łatwo zauważyć , że charakterystyki częstotliwościowe wszystkich filtrów dolnoprzepustowych można przedstawić przy pomocy wyrażenia :
(2.0)
Rząd filtru określony jest najwyższą potęgą S po wykonaniu mnożeń w mianowniku . Ten rząd determinuje asymptotyczny spadek charakterystyki częstotliwościowej wzmocnienia z szybkością -n20dB na dekadę . Pozostała część przebiegu zależy dla danego rzędu od typu filtru .
Dodatkowo częstotliwość graniczna ( 3dB ) każdego takiego ogniwa filtru jest określona przez wielkość νgi/νg .Ta wielkość nie jest wykorzystywana do obliczeń , ale jest bardzo przydatna , gdyż umożliwia sprawdzenie prawidłowego funkcjonowania poszczególnych ogniw filtru .
PROJEKT FILTRU CYFROWEGO
Parametry filtru cyfrowego:
![]()
![]()
Częstotliwość próbkowania:
![]()
Tłumienie w paśmie przepustowym i zaporowym
![]()
![]()
Ze względu na zniekształcenie osi częstotliwości prototyp analogowy filtru cyfrowego projektuję według przeliczonej pulsacji granicznej. Posługuję się programem Mathcad 15 do obliczenia wartości współczynników transmitancji filtru.
1.Określenie parametrów filtru cyfrowego:
Obliczenie pulsacji unormowanych
![]()
![]()
![]()
![]()
2.Wyznaczenie pulsacji granicznych filtru analogowego:
![]()
![]()
![]()
![]()
3.Wyznaczenie parametrów unormowanego dolnoprzepustowego filtru analogowego:
![]()
![]()
![]()
4.Zaprojektowanie dolnoprzepustowego prototypowego filtru unormowanego:
- wyznaczenie rzędu filtru N a także parametru ε
![]()
![]()
Wyznaczenie rzędu filtru:
![]()
![]()
- na podstawie parametrów filtru obliczam bieguny filtru prototypowego:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Bieguny filtru:
-wyznaczenie transmitancji filtru prototypowego
Licznik:
Mianownik:
![]()
Za pomocą funkcji explicit podstawiamy wartość licznika i mianownika
![]()
Transmitancja filtru prototypowego:
![]()
5.Dokonanie transformacji częstotliwości filtru prototypowego na filtr analogowy:
- za s podstawiamy:
![]()
- licznik i mianownik mnożymy przez ![]()
Uzyskujemy transmitancję operatorową filtru analogowego:

6.Wyznaczenie charakterystyk częstotliwościowych (amplitudowa i fazowa), a także czasowe (odpowiedź impulsową i skokową) zaprojektowanego filtru analogowego
Wyznaczenie charakterystyk częstotliwościowych
![]()
![]()
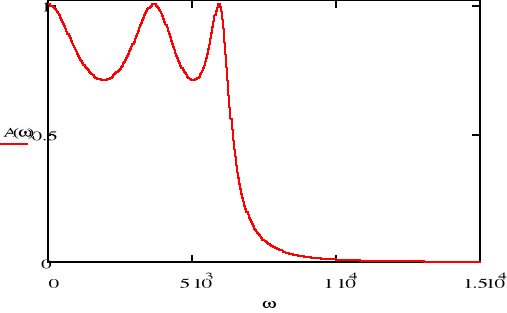
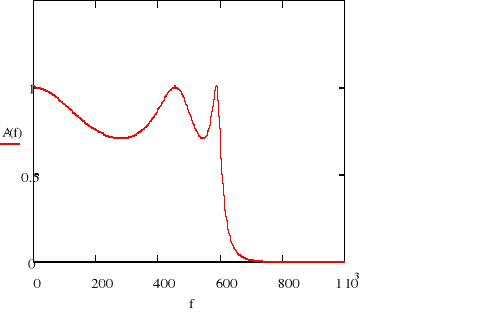
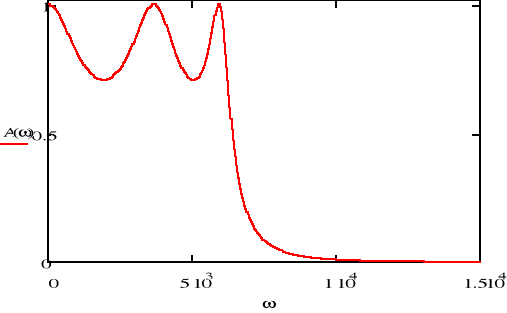
Charakterystyka amplitudowa
![]()
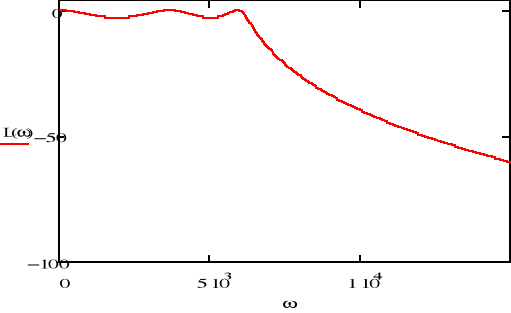
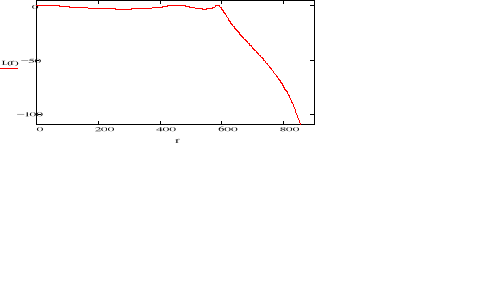
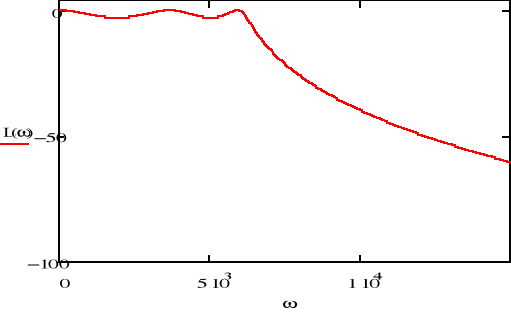
Charakterystyka amplitudowa logarytmiczna
![]()
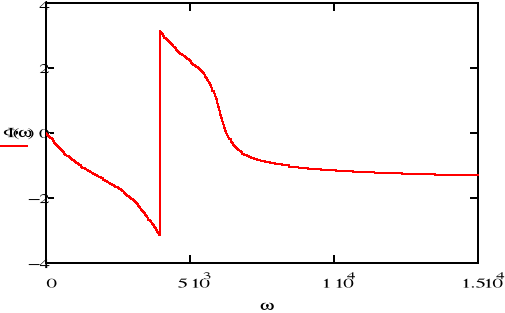
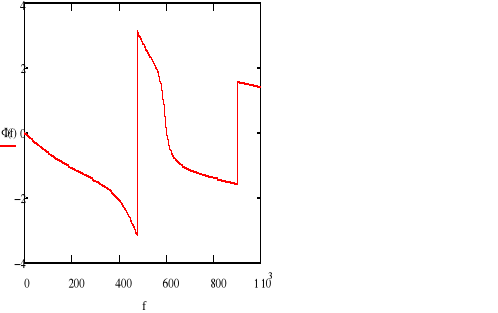
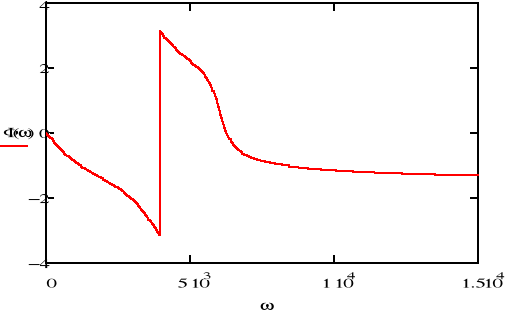
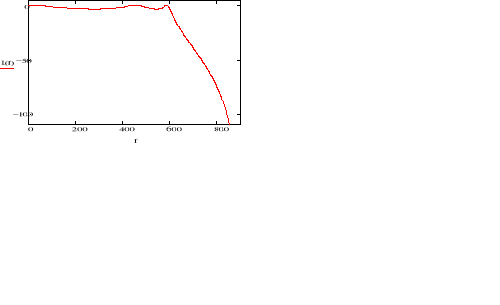
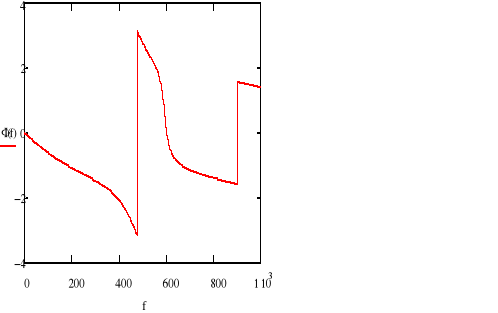
Charakterystyka fazowa
![]()
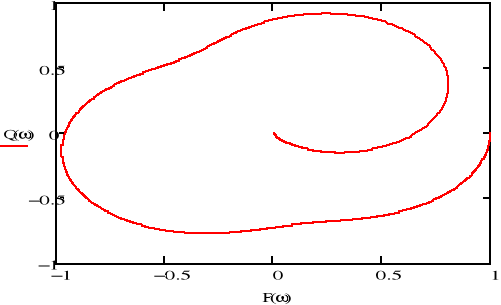
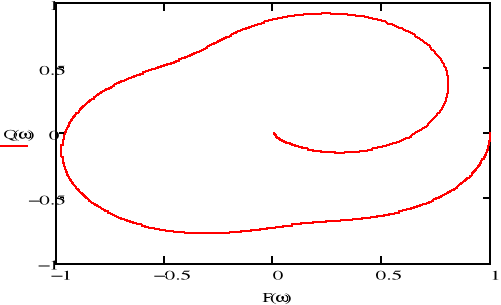
wykres Nyquista
![]()
Wyznaczenie charakterystyk czasowych
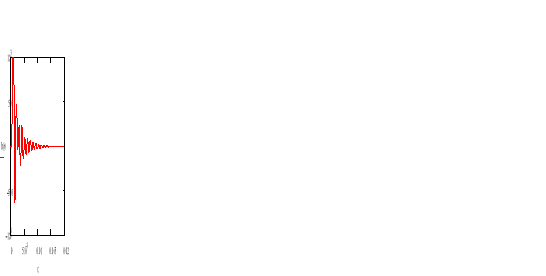
Odpowiedz impulsowa

Wyznaczenie czasu ustalania
Czas ustalania jest to czas po którym sygnał nie różni się o 5% sygnału wartości w stanie ustalonym
(jest równe od 0.95 - 1.05)
![]()
Szacunkowy czas ustalania: ok. ![]()
s
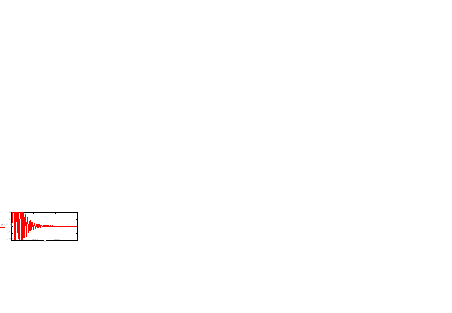
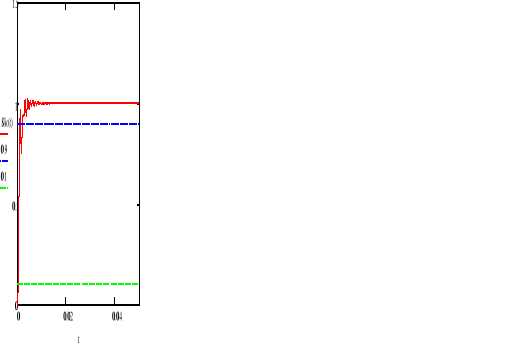
Odpowiedz skokowa
![]()
![]()
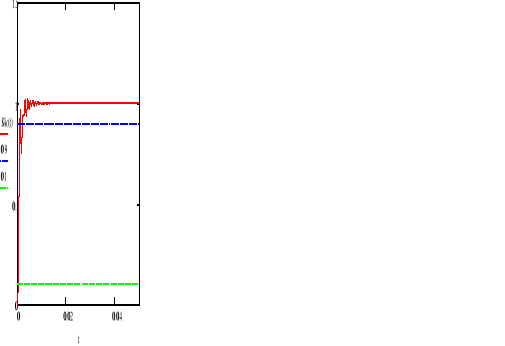
Czas narastania jest czasem sygnału od 0,1 do 0.9 wartości w stanie ustalonym.
![]()
![]()
![]()
Szacunkowy czas narastania: ![]()
s
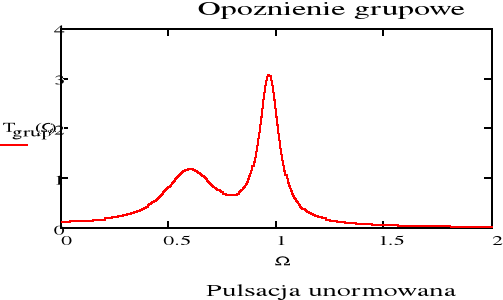
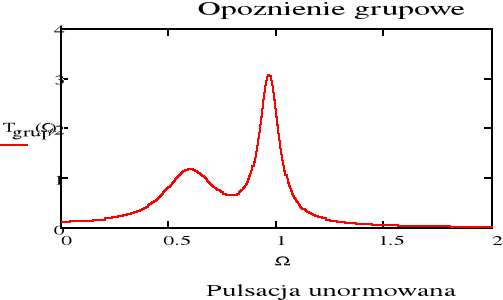
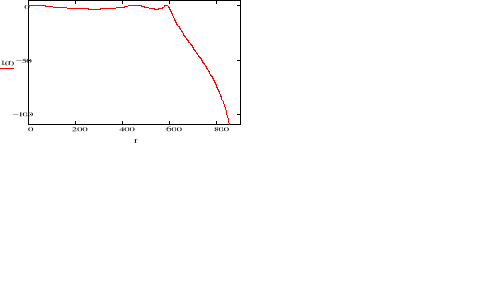
Opóźnienie grupowe
![]()
![]()
![]()

![]()
![]()
![]()
7.Wyznaczenie transmitancji filtru cyfrowego na podstawie transmitancji biliniowej:
-za s podstawiamy
![]()
Otrzymujemy transmitancję filtru cyfrowego:

8.Wyznaczenie charakterystyk częstotliwościowych zaprojektowanego filtru cyfrowego:
Wyznaczenie charakterystyk częstotliwościowych
Charakterystyka amplitudowa
![]()
Charakterystyka amplitudowa logarytmiczna
Charakterystyka fazowa
WYDRUK PROGRAMU
Parametry zadane dla projektowanego filtru cyfrowego:
![]()
![]()
![]()
![]()
![]()
Obliczenie pulsacji unormowanych
![]()
![]()
![]()
![]()
![]()
![]()
Obliczenie pulsacji filtru prototypowego
![]()
![]()
![]()
![]()
![]()
Wyznaczenie współczynnika ![]()
Wyznaczenie rzędu filtru
![]()
![]()
Obliczenie biegunów transmitancji:
![]()
![]()
![]()
![]()
![]()
![]()
Obliczenie liczniki i mianownika filtru prototypowego
Liczniki jest iloczynem biegunów
Mianowniki iloczynem ![]()
Za pomocą funkcji explicit podstawiamy wartość licznika i mianownika
![]()
![]()
Obliczenie transmitancji filtru analogowego za pomocą transformacji częstotliwości
Licznik mnożymy razy ω.pass^5
![]()
![]()
Mianownik mnożymy razy ω.pass^5 a także za s podstawiamy s/ω.pass
Za pomocą funkcji explicit podstawiamy liczniki i mianownik
![]()

Ostateczna postać transmitancji filtru analogowego:

Wyznaczenie charakterystyk częstotliwościowych
![]()
![]()
charakterystyka amplitudowa
![]()
charakterystyka amplitudowa logarytmiczna
![]()
charakterystyka fazowa
![]()
wykres Nyquista
![]()
Za pomocą funkcji invlaplace wyznaczamy odwrotna transformaty Laplace
Wyznaczenie charakterystyk czasowych
Odpowiedz impulsowa
Funkcja czasowa przyjmuje postać:
![]()
Odpowiedz impulsowa
Wyznaczenie czasu ustalania
![]()
Szacunkowy czas ustalania: ok. ![]()
s
Odpowiedź skokową wyznaczamy podobnie jak odpowiedź impulsowa z tym że przed przekształceniem mnożymy wyrażenie przez 1/s
Odpowiedz skokowa
![]()
![]()
![]()
Szacunkowy czas narastania: ![]()
s
Opóźnienie grupowe
Obliczenie funkcji opóźnienia grupowego:
![]()
![]()


![]()
![]()
![]()
![]()
Wyznaczenie transmitancji filtru cyfrowego
Wyznaczanie transmitancji filtru cyfrowego odbywa się przez podstawienie za s ![]()
Transmitancja filtru cyfrowego przyjmuje postać:

Wyznaczenie charakterystyk częstotliwościowych
![]()
charakterystyka amplitudowa
![]()
Charakterystyka amplitudowa logarytmiczna
Charakterystyka fazowa
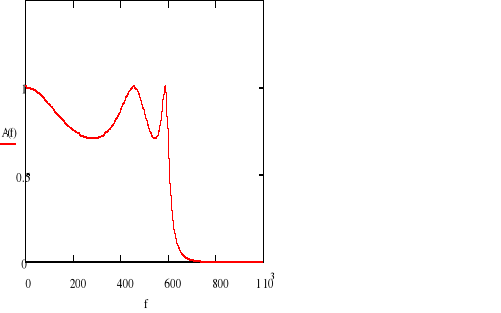
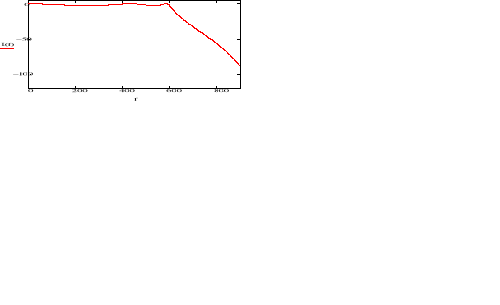
ANALIZA CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWEJ
![]()
Charakterystyka amplitudowa logarytmiczna
Na podstawie powyższej charakterystyki widać że maksymalne dopuszczalne tłumienie w paśmie przepustowym ![]()
jest równe zgodnie z założeniami 3dB, a częstotliwość końca pasma przepustowego równa 600Hz.
Na powyższej charakterystyce widać że filtr spełnia wytyczne w paśmie zaporowym, ponieważ charakterystyka przechodzi poniżej punktu ![]()
Na powyższej charakterystyce widać że dla przeprowadzonych obliczeń ![]()
, przy wymagalnym minimalnym tłumieniu w paśmie zaporowym ![]()
filtr spełnia założenia projektowe.
WPŁYW CZĘSTOTLIWOŚCI PRÓBKOWANIA NA UZYSKANE CHARAKTERYSTYKI
Przy zwiększeniu częstotliwości próbkowania zmienia się rząd filtru
Powyżej częstotliwości ![]()
rząd filtru zmienia się na 6
Powyżej częstotliwości ![]()
rząd filtru zmienia się na 7
Przy zmniejszeniu częstotliwości próbkowania rząd filtru maleje:
Poniżej częstotliwości ![]()
rząd filtru zmienia się na 4
Poniżej częstotliwości ![]()
rząd filtru zmienia się na 3
Wniosek: Aby filtr był rzędu 5 częstotliwość próbkowania powinna znajdować się w granicach od 1799 do 2147 Hz. Zwiększenia częstotliwości próbkowania poza ten zakres powoduje zwiększenie rzędu filtru. A zmniejszenie częstotliwości powoduje zmniejszenie rzędu filtru.
Zwiększenie częstotliwości próbkowania do ![]()
Charakterystyka amplitudowa logarytmiczna

Przy zwiększonej częstotliwości próbkowania o 200Hz zafalowania filtru są nadal na poziomie 3 dB
Jak widać w paśmie zaporowym charakterystyka zbliżyła się bardziej do punktu ![]()
, lecz znajdując się pod nim powoduje że filtr nadal spełnia założenia projektowe
Zwiększenie częstotliwości próbkowania do ![]()
Charakterystyka amplitudowa logarytmiczna
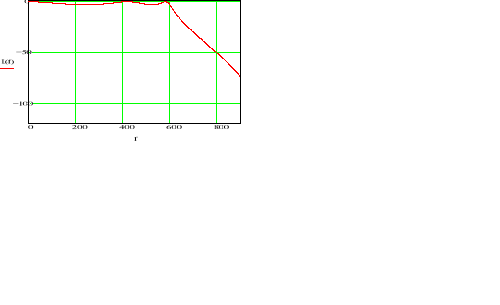
Przy zwiększonej częstotliwości próbkowania o 340Hz zafalowania filtru są nadal na poziomie 3 dB
Przy zwiększonej częstotliwości próbkowania do ![]()
jak widać na powyższej charakterystyce filtr znajduje się na granicy stabilności ponieważ wykres przechodzi przez punkt ![]()
. Dla częstotliwości próbkowania wyższych należy zwiększyć rząd filtru, aby filtr pracował optymalnie.
WNIOSKI
Projekt filtru dolnoprzepustowego Czebyszewa został wykonany w programie Mathcad.
Za pomocą tego programu w łatwy sposób można wykonywać różnego rodzaju obliczenia i wykresy. Część rzeczywista wszystkich biegunów transmitancji ma wartość ujemną, zapewnia to stabilność filtru. Rząd filtru zależy od częstotliwości próbkowania im większa częstotliwości próbkowania tym większy rząd, co za tym idzie filtr posiada lepsze właściwości, ale jego realizacja jest trudniejsza. Charakterystyk amplitudowa filtru cyfrowego jest funkcją okresową której okres wynosi 1/fp.
Charakterystyki czasowe informują nas o tym czy filtr jest stabilny czy nie. Badany filtr jest stabilny, jego odpowiedź impulsowa dąży do `0' i mamy do czynienia z gasnącymi oscylacjami. Odpowiedź na skok jednostkowy dąży do `1' gdyż, jak wiadomo, filtr dolnoprzepustowy przepuszcza składowe nisko częstotliwościowe i składową stałą, zaś tłumi składowe o wysokiej częstotliwości.
Rozważany przez nas filtr Czebyszewa typu I ma zafalowanie w paśmie przepustowym, za to nie ma zafalowań w paśmie zaporowym, ma mocno nieliniową charakterystykę fazową.
Na podstawie powyższych analizy charakterystyk można wywnioskować że filtr pracuje stabilnie i spełnia wymagania projektowe. Zgodnie z założeniami w paśmie przepustowym (0 - 600)Hz tłumienie filtru wynosi 3dB. Charakterystyka filtru przechodzi przez punkt ![]()
, dzięki czemu filtr pracuje prawidłowo. Na podstawie charakterystyk widać że filtr spełnia wytyczne w paśmie zaporowym, ponieważ charakterystyka przechodzi poniżej punktu ![]()
. Zmiany częstotliwości próbkowania mają wpływ na charakterystykę amplitudową filtru. Przy zwiększaniu częstotliwości próbkowania charakterystyka przechodzi coraz bliżej punktu ![]()
, jeżeli charakterystyka przejdzie nad tym punktem to filtr działa nieprawidłowo, charakterystyka musi przechodzić pod tym punktem. Zwiększanie częstotliwości próbkowania wpływa także na zmianę rzędu filtru. Zwiększanie częstotliwości próbkowania powoduje zwiększenie rzędu filtru, a zmniejszanie częstotliwości powoduje zmniejszanie rzędu. Na podstawie charakterystyk czasowych widać że filtr jest stabilny - widoczne są gasnące oscylacje zarówno w przebiegu odpowiedzi impulsowej i skokowej.
Na podstawie charakterystyki amplitudowej można stwierdzić że im bardziej stromo opada charakterystyka tym rząd filtru musi być większy. W przypadku obliczania rzędu filtru należy otrzymany wynik zaokrąglić do liczby całkowitej w górę. W naszym przypadku otrzymany wynik N:=4.005 został zaokrąglony w górę do N:=5, i właśnie dalsze rozwiązanie zadania opierały się na przyjętym piątym rzędzie filtru. Obliczona transmitancja filtru Czebyszewa nie ma zer, jej bieguny leża na elipsie o promieniu R (okrąg zewnętrzny) i r (okrąg zewnętrzny). Na podstawia obliczonych biegunów w łatwy sposób można obliczyć transmitancję filtru prototypowego, wiedząc że licznik jest iloczynem biegunów ![]()
, a mianownik iloczynem ![]()
. Po podstawieniu otrzymujemy transmitancję prototypowego filtru analogowego H(s). Aby przejść do transmitancji filtru analogowego należy dokonać transformację częstotliwości (transformata ta polega na podstawieniu za „s” odpowiedniej funkcji w wyniku czego otrzymujemy docelową transmitancję filtru analogowego). W przypadku naszego przekształcenia podstawiamy ![]()
. Po przeliczeniu otrzymujemy transmitancję filtru analogowego. Aby otrzymać transmitancję cyfrową należy zastosować transformację bilingową (dwuliniową) podstawiając ![]()
. Na podstawie otrzymanej transmitancji filtru cyfrowego otrzymujemy charakterystykę częstotliwościową amplitudową filtru, która jest najważniejszą częścią w sprawdzeniu poprawności pracy filtru.
W przypadku naszego filtru na podstawie charakterystyki stwierdzamy że filtr pracuje zgodnie z założeniami projektowymi.
BIBLIOGRAFIA:
Tomasz P. Zieliński: Cyfrowe przetwarzanie sygnałów. Od teorii do zastosowań. Wydawnictwa komunikacji i łączności, Warszawa 2005
Projektowanie filtrów cyfrowych Butterwortha i Czebyszewa http://teleinfo.pb.bialystok.pl/krashan/articles/filtry_iir/
Filtr Czebyszewa założenia teoretyczne i przykład projektowania. http://www.kmg.ps.pl/to/filtry_ak/czeby_p1.html
Mathcad instrukcja obsługi http://technologialaserowa.republika.pl/mathcad.pdf
Izydorczyk J., Płonka G., Tyma G.,: Teoria sygnałów, Helion Gliwice 1999
Wyszukiwarka
Podobne podstrony:
kolsiib2013, Przwatne, Studia, Nowy folder
pomoc maszyny, Przwatne, Studia, Nowy folder
w6, Przwatne, Studia, Nowy folder
Present Perfect Continuous, Przwatne, Studia, Nowy folder
ubezpieczenia emerytalne, Studia, Nowy folder
ciśnienie, studia, Nowy folder, Nowy folder, spraw wszelkie
prac4rlc, studia, Nowy folder, Elektrotechnika, rlc
Pomiar napięcia, studia, Nowy folder, Nowy folder, spraw wszelkie
Pomiary sprawdzianów dwugraicznych poprawka, Politechnika Lubelska, Studia, Studia, Nowy folder1
Nas Z-N, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder, Teoria ster-EZ 04 05
maszyny ostatnie(2), studia, Nowy folder, Nowy folder
Badanie oleju transformatorowego, studia, Nowy folder, Nowy folder, spraw wszelkie
generatory analogowe, studia, Nowy folder, Nowy folder, spraw wszelkie
więcej podobnych podstron