Kolokwium wykładowe z kinamatyki
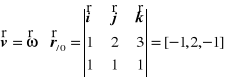
1. Obliczyć wartość iloczynu skalarnego ![]()
wektorów o składowych ![]()
i ![]()
.
Odp.: ![]()
.
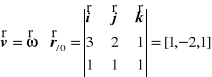
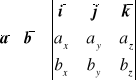
2. Obliczyć wartość iloczynu wektorowego ![]()
wektorów o składowych ![]()
i ![]()
.
Odp.: 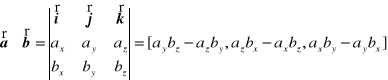
.
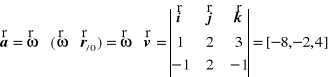
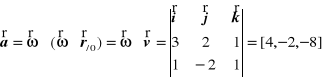
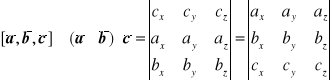
3. Obliczyć wartość iloczynu mieszanego ![]()
wektorów o składowych ![]()
, ![]()
i ![]()
.
Odp.:

.
4. Uprościć wyrażenie: ![]()
.
Odp.: Na podstawie tożsamości ![]()
wnioskujemy ![]()
.
5. Uprościć wyrażenie: ![]()
.
Odp.: ![]()
. Na podstawie antyprzemienności iloczynu mieszanego wnioskujemy, że ![]()
. Stąd wynika ![]()
.
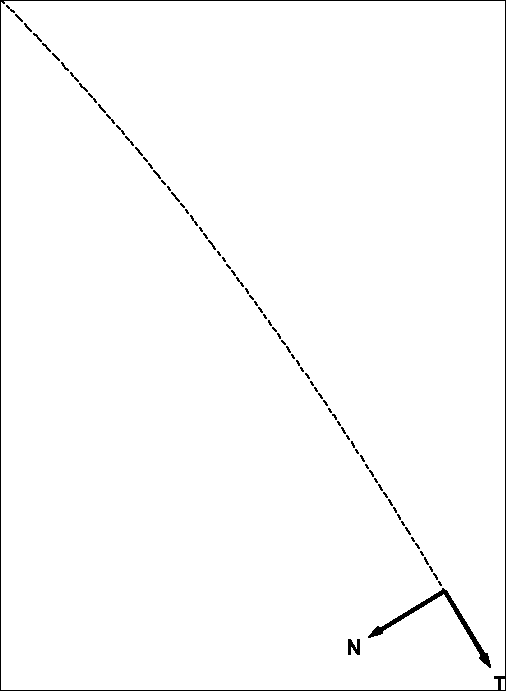
6. Sformułuj i objaśnij twierdzenie o rozkładzie przyspieszenia punktu na przyśpieszenie normalne i styczne.
Odp.: ![]()
gdzie ![]()
jest przyspieszeniem stycznym, ![]()
jest przyśpieszeniem normalnym, ![]()
jest jednostkowym wektorem stycznym, ![]()
jest krzywizną toru, ![]()
jest promieniem krzywizny toru, ![]()
jest jednostkowym wektorem normalnym.
7. Dane są równania płaskiego ruchu punktu materialnego: ![]()
gdzie ![]()
i ![]()
są stałymi. Wyznaczyć przyspieszenie normalne i styczne w chwili ![]()
.
Odp.: 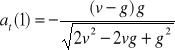
, 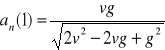
.
Obliczenia: Na podstawie twierdzenia o rozkładzie przyspieszenia punktu na przyśpieszenie normalne i styczne obliczmy:
a). Wektor prędkości punktu ![]()
.
b). Długość wektora prędkości ![]()
.
c). Jednostkowy wektor styczny 
.
d). Jednostkowy wektor normalny 
, bo w ruchu płaskim wystarczy obrócić ![]()
o -90o aby otrzymać ![]()
.
e). Wektor przyśpieszenia ![]()
.
f). Przyspieszenie styczne 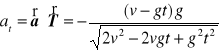
.
g). Przyspieszenie normalne 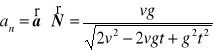
.
h). Wartości chwilowe przyspieszenia stycznego i normalnego:
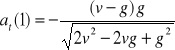
, 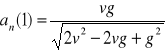
.
8. Dane są równania płaskiego ruchu punktu materialnego: ![]()
gdzie ![]()
i ![]()
są stałymi. Wyznaczyć przyspieszenie normalne i styczne w chwili ![]()
.
Odp.: 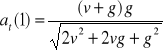
, 
.
Obliczenia: Na podstawie twierdzenia o rozkładzie przyspieszenia punktu na przyśpieszenie normalne i styczne obliczmy:
a). Wektor prędkości punktu ![]()
.
b). Długość wektora prędkości ![]()
.
c). Jednostkowy wektor styczny 
.
d). Jednostkowy wektor normalny 
, bo w ruchu płaskim wystarczy obrócić wektor styczny ![]()
o -90o aby otrzymać wektor normalny ![]()
.
e). Wektor przyśpieszenia ![]()
.
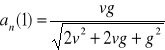
f). Przyspieszenie styczne 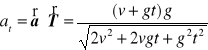
.
g). Przyspieszenie normalne 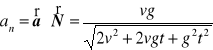
.
h). Wartości chwilowe przyspieszenia stycznego i normalnego:
, 
.
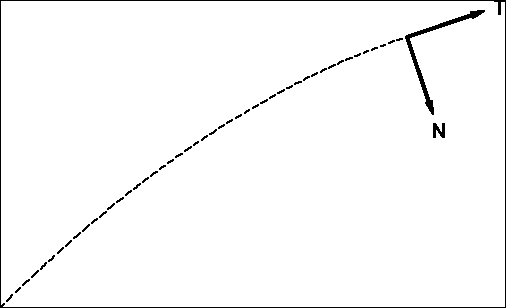
9. Koło o promieniu R toczy się ruchem płaskim po płaszczyźnie bez poślizgu. Wiadomo, że prędkość środka koła ![]()
jest stała. Wyznaczyć przyspieszenie punktu odległego o r od środka koła w swym najwyższym/najniższym/dowolnym położeniu.
Odp.: ![]()
.
Obliczenia.
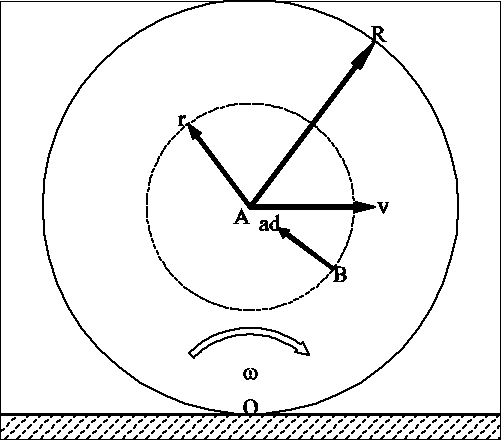
Z twierdzenia o prędkościach punktów bryły ![]()
, bo ![]()
.
Zatem prędkość kątowa koła wynosi ![]()
. Zatem przyśpieszenie kątowe koła wynosi ![]()
.
Z twierdzenia o przyśpieszeniach punktów bryły ![]()
. Ale przyśpieszenie środka koła wynosi ![]()
. Przyśpieszenie obrotowe również znika ![]()
. Pozostaje jedynie przyśpieszenie dośrodkowe ![]()
.
Uwaga! Jak to zwykle bywa w niniejszym zadaniu przyśpieszenie środka chwilowego obrotu jest niezeroweeeeeeeeeeeeeeeee i wynosi ![]()
.
10. Sformułuj i objaśnij twierdzenie o prędkościach i przyśpieszeniach punktów bryły w ruchu kulistym.
Odp.: W ruchu kulistym prędkość i przyśpieszenie punktu bryły o położeniu ![]()
względem środka ruchu wynoszą odpowiednio
![]()
, ![]()
gdzie ![]()
jest wektorem prędkości kątowej bryły, a ![]()
jest wektorem przyśpieszenia kątowego bryły?
12. Wiadomo, że bryła porusza się ruchem obrotowym ze stałą prędkością kątową ![]()
. Obliczyć składowe wektorów prędkości i przyśpieszenia punktu bryły o współrzędnych ![]()
względem układu współrzędnych z zerem na osi obrotu.
Odp.: ![]()
, ![]()
.
Z twierdzenia o prędkościach punktów bryły w ruchu kulistym wynika, że prędkość rozpatrywanego punktu wynosi
Z twierdzenia o przyśpieszeniach punktów bryły w ruchu kulistym wynika, że przyśpieszenie rozpatrywanego punktu wynosi
bo ![]()
.
13. Wiadomo, że bryła porusza się ruchem obrotowym ze stałą prędkością kątową ![]()
. Obliczyć składowe wektorów prędkości i przyśpieszenia punktu bryły o współrzędnych ![]()
względem układu współrzędnych z zerem na osi obrotu.
Odp.: ![]()
, ![]()
.
Z twierdzenia o prędkościach punktów bryły w ruchu kulistym wynika, że prędkość rozpatrywanego punktu wynosi
Z twierdzenia o przyśpieszeniach punktów bryły w ruchu kulistym wynika, że przyśpieszenie rozpatrywanego punktu wynosi
bo ![]()
.
14. Wiadomo, że bryła porusza się ruchem kulistym, a punkty A i B mają współrzędne odpowiednio [1,0,0] i [0,1,0] względem układu współrzędnych z zerem w środku ruchu kulistego. Wiadomo również, że składowe prędkości punktów A i B wynoszą odpowiednio [0,3,-2] i [-3,0,1] w tym samym układzie współrzędnych. Wyznaczyć składowe wektora prędkości kątowej bryły.
Odp.: ![]()
.
Obliczenia: Z twierdzenia o prędkościach punktów bryły w ruchu kulistym zastosowanego dla punktów A i B wynika
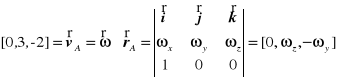
,
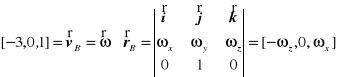
.
Stąd wnioskujemy, że ![]()
, ![]()
, ![]()
jest rozwiązaniem otrzymanego układu równań.
15. Wiadomo, że bryła porusza się ruchem kulistym, a punkty A i B mają współrzędne odpowiednio [1,0,0] i [0,1,0] względem układu współrzędnych z zerem w środku ruchu kulistego. Wiadomo również, że składowe prędkości punktów A i B wynoszą odpowiednio [0,1,-2] i [-1,0,3] w tym samym układzie współrzędnych. Wyznaczyć składowe wektora prędkości kątowej bryły.
Odp.: ![]()
.
Obliczenia: Z twierdzenia o prędkościach punktów bryły w ruchu kulistym zastosowanego dla punktów A i B wynika
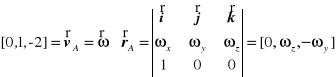
,
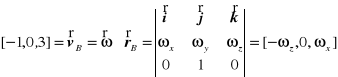
.
Stąd wnioskujemy, że ![]()
, ![]()
, ![]()
jest rozwiązaniem otrzymanego układu równań.
16. Sformułuj i objaśnij twierdzenie o prędkościach w ruchu złożonym punktu.
Odp.: Jeżeli równania ruchu punktu materialnego przedstawić w postaci
![]()
gdzie ![]()
są współrzędnymi rozpatrywanego punktu względem zaczepionego w punkcie ![]()
ruchomego układu współrzednych o wersorach ![]()
to prędkość bezwzględna punktu wynosi ![]()
gdzie
![]()
jest prędkością względną, a
![]()
jest prędkością unoszenia, natomiast ![]()
jest wektorem prędkości kątowej ruchomego układu współrzędnych.
17. Sformułuj i objaśnij twierdzenie o przyśpieszeniach w ruchu złożonym punktu.
Odp.: Jeżeli równania ruchu punktu materialnego przedstawić w postaci
![]()
gdzie ![]()
są współrzędnymi rozpatrywanego punktu względem zaczepionego w punkcie ![]()
ruchomego układu współrzednych o wersorach ![]()
to przyspieszenie bezwzględne punktu wynosi ![]()
gdzie
![]()
jest przyśpieszeniem względnym,
![]()
jest przyśpieszeniem unoszenia, a
![]()
jest przyspieszeniem Coriolisa natomiast ![]()
i ![]()
są wektorami prędkości i przyspieszenia kątowego ruchomego układu współrzędnych.
Dodatek - Iloczyn wektorowy
Iloczyn wektorowy jest pseudowektorem, tzn. wynik obliczeń w dwu różnych układach współrzędnych nie zależy od wyboru układu współrzędnych pod warunkiem, że oba układy mają tę samą skrętność a zmienia zwrot na przeciwny w przypadku układów o różnych skrętnościach.
Podstawowe właściwości:
![]()
Kierunek iloczynu wektorowego ![]()
jest prostopadły do czynników, a zwrot taki, że trójka wektorów ![]()
ma taką samą skrętność jak przyjęty układ współrzędnych.
![]()
![]()
Dodatek - Iloczyn mieszany
Iloczyn mieszany jest pseudoskalarem, tzn. wynik obliczeń w dwu różnych układach współrzędnych nie zależy od wyboru układu współrzędnych pod warunkiem, że oba układy mają tę samą skrętność a zmienia znak na przeciwny w przypadku układów o różnych skrętnościach.
Podstawowe właściwości:
![]()
Wyszukiwarka
Podobne podstrony:
Harmonogram ETI, Studia Politechnika Wydział Mechaniczny, studia, Sem III, SEMESTR III, płyny, labor
opracowanie 4 mechana, Studia - Mechatronika, III semestr, Mechanika Techniczna
opracowanie 4 mt, Studia - Mechatronika, III semestr, Mechanika Techniczna
Mechatronika tematy egz, Studia, Sem III, Wytrzymałość materiałów II
opracowanie 4 mechana, Studia - Mechatronika, III semestr, Mechanika Techniczna
Kol-1R, Prywatne, Budownictwo, Materiały, III semestr, Mechanika II, mechanika II
mini min bryÄŹĹĽËťa, Prywatne, Budownictwo, Materiały, III semestr, Mechanika II, mechanika II
tomek mechana 2 2, Prywatne, Budownictwo, Materiały, III semestr, Mechanika II, mechanika II, projek
Zadania odp same, Prywatne, Budownictwo, Materiały, III semestr, Mechanika II, mechanika II, Dynamik
Ekonomika ochrony srodowiska wyklad 18.04.05, administracja, II ROK, III Semestr, rok II, sem IV, Ek
egzamin gps II sem III, Studia, Geodezja, III SEMESTR, Nieposortowane, III SEMESTR, GPSZ II SEM
Prawo ochrony srodowiska Wyklad 06, administracja, II ROK, III Semestr, rok II, se
Postepowanie administracyjne W 18.05, administracja, II ROK, III Semestr, rok II, sem IV, postępowan
Ekonomika Ochrony Srodowiska wyklad 28.02.05, administracja, II ROK, III Semestr, rok II, sem IV, Ek
Ekonomika srodowiska wyklad 07.03.05, administracja, II ROK, III Semestr, rok II, sem IV, Ekonomika
2010 Biochemia, Studia UMCS, III semestr, Biochemia, kolokwia połówkowe
więcej podobnych podstron