Równania ruchu
Równania ruchu układów dynamicznych rozpoczynamy od zasady Hamiltona. Dla układu zachowawczego wymaga ona, aby całka
![]()
![]()
(3.2.1.)
miała wartość ekstremalną. Funkcja podcałkowa L reprezentuje nadwyżkę energii kinetycznej nad potencjalną tj.
L = Ak − Ap (3.2.2.)
gdzie:
L - funkcja Lagrange'a
Ak -energia kinetyczna
Ap - energia potencjalna
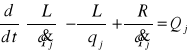
Po obliczeniu wariacji całki względem kolejnych zmiennych (współrzędnych uogólnionych) otrzymuje się równania Lagrange'a drugiego rodzaju; dla układów zachowawczych, bez strat i bez wymuszenia zewnętrznego:
(3.2.3.)
dla j = 1,..., k
gdzie:
q j -współrzędne uogólnione
k - liczba stopni swobody
Dla układów niezachowawczych - rzeczywistych, ze stratami i z wymuszeniem zewnętrznym równania Lagrange'a przyjmują postać:
(3.2.4.)
gdzie:
![]()
- funkcja strat
![]()
- funkcja wymuszenia
3.3. Stabilność oraz stany nieustalone
„Stabilnością układu nazywamy jego skłonność powracania do warunków równowagi statycznej, gdy został z nich wytrącony.”[1]
„Zmiana wartości obciążenia lub siły elektromotorycznej silnika powoduje zakłócenie równowagi ruchu napędu”[1]: zmianę momentu dynamicznego oraz prędkości ruchu. Zakłócenia równowagi ruchu napędu nazywamy stanem nieustalonym, który trwa aż do osiągnięcia nowej stałej prędkości ruchu układu napędowego.
Układ napędowy znajduje się w stanie równowagi gdy Md = 0 tj. gdy Ms(ω) = Mobc.( ω). Stan równowagi dynamicznej jest punktem pracy układu napędowego: jest to punkt przecięcia się charakterystyki silnika z charakterystyką obciążenia rys. 3.3.1.
Rys. 3.3.1. Punkt pracy układu napędowego [1]
Moment dynamiczny jest różnicą pomiędzy momentem silnika (wymuszeniem zewnętrznym) a momentem oporu (obciążeniem).
![]()
(3.3.1.)
3.4. Więzy sprężyste
„Więzy sprężyste charakteryzuje współczynnik sztywności k określany jako wartość siły potrzebnej dla jednostkowego przesunięcia jednego końca więzów względem drugiego. Dla przesunięcia prostoliniowego wartość tego współczynnika można wyznaczyć wg wzoru :
![]()
(3.4.1.)
gdzie:
F - siła rozciągająca więzy [N],
∆l - wydłużenie liniowe [m],
E - moduł sprężystości Younga [N / m2],
Q - przekrój poprzeczny [m2],
l - długość więzi [m].
Dla przesunięcia obrotowego współczynnik sztywności jest równy:
(3.4.2.)
gdzie:
M - moment skręcający więzy [Nm],
∆α - skręcenie więzi [rad],
G - moduł sprężystości poprzecznej [N / m2],
d - średnica więzi [m].”[1]
„Zarówno model mechanizmu jazdy, jak i podnoszenia jest nieswobodnym układem materialnym. Oznacza to, że na niektóre elementy układu nałożone są więzy ograniczające ich swobodę ruchu.
Więzy określone równaniami są więzami dwustronnymi. Jeżeli równanie więzów zawiera tylko współrzędne punktów, to nazywamy je więzami geometrycznymi lub holonomicznymi.
![]()
(3.4.3.)
Równania więzów mogą być także zależne od prędkości punktów, wówczas nazywamy je więzami kinematycznymi lub nieholonomicznymi.
![]()
(3.4.4.)
Oba rodzaje więzów mogą ponadto zależeć od czasu. Więzy zależne od czasu nazywamy więzami skleronomicznymi lub stacjonarnymi.”[2]
Obliczenia mechanizmu podnoszenia
Obliczenie mechanizmu jazdy
Model matematyczny - dwumasowy
Model mechanizmu podnoszenia służący do badania ruchu sprowadza się do układu dwóch mas zredukowanych połączonych ze sobą elementem sprężystym rys. 6.1.1. Masa m1 jest to zredukowana na wał wolnoobrotowy reduktora masa, która zastępuje momenty bezwładności elementów obrotowych: wirnika silnika, sprzęgieł, bębna hamulcowego, kół zębatych i bębna z nawiniętą liną. Masa m2 jest to zredukowana masa zastępująca masę ładunku zawieszonego na linie oraz masę zblocza.
![]()
- zredukowana masa zastępująca momenty bezwładności
wirnika silnika, sprzęgieł bębna hamulca, kół zębatych i
bębna z nawiniętą liną ;
![]()
- siła zastępcza na obwodzie bębna linowego,
reprezentującą moment silnika ;
![]()
- zredukowana masa zastępująca masy ładunku
zawieszonego na haku i zblocza ;
![]()
- siła zastępcza reprezentującą ciężar ładunku
zawieszonego na haku i zblocza ;
![]()
- zredukowana sztywność lin w układzie
wielokrążkowym zredukowanym do pojedynczej
liny zastępczej ;
![]()
- zredukowany współczynnik tłumienia ;
Rys. 6.1.1. Model matematyczny - dwumasowy
6.2. Równania ruchu
ROZRUCH
„W zależności od warunków, w jakich rozpoczyna się rozruch mechanizmu podnoszenia, wartości początkowe przyjmują różne wartości.”[1]
Przypadek z napiętymi więzami :
Rys. 6.2.1. Model matematyczny - dwumasowy przypadek z napiętymi więzami
Na rysunku 6.2.1. przedstawiono przypadek gdzie obydwie masy startują jednocześnie, a więc ich wartości początkowe są równe zero:
![]()
(6.2.1.)
Równania ruchu przyjmują postać:

(6.2.2.)
Przypadek ze zluzowanymi więzami :
Rys. 6.2.2. Model matematyczny - dwumasowy przypadek ze zluzowanymi więzami
Rysunek 6.2.2. ilustruje nam ładunek spoczywający na podłożu, lina nie jest napięta. Ruch takiego układu rozpoczyna się od fazy napinania więzów, tj. początkowo porusza się tylko masa m1, co powoduje stopniowe rozciąganie więzów. Faza ta trwa do chwili, w której siła odkształcająca więzy osiągnie wartość równą sile S2 .
Układ ma tylko jeden stopień swobody, a więc ruch układu opisuje jedno równanie drugiego rzędu.
![]()
(6.2.3.)
Przypadek z nadmiernym luzem w linie :
Rys .6.2.3. Model matematyczny - dwumasowy przypadek z nadmiernym luzem w linie
Na rysunku 6.2.3. ładunek również jak w powyższym przykładzie (rys. 6.2.2.) spoczywa na podłożu, lecz tym razem liny są bardziej luźne. Ruch takiego układu rozpoczyna się od fazy kasowania luzu w więzach - porusza się tylko masa m1 pociągając za sobą linę bez oporu, a masa m2 spoczywa swobodnie na podłożu .
Wartości początkowe są równe zero:
![]()
(6.2.4.)
W równaniu nie występują zewnętrzne ani wewnętrzne siły oporu.
![]()
(6.2.5.)
Ruch jest jednostajnie przyspieszony i trwa do chwili wyczerpania luzu:
![]()
![]()
(6.2.6.)
Czas kasowania luzów wyraża się wzorem:

(6.2.7.)
Prędkość masy m1 w chwili skasowania luzu jest równa:
![]()

(6.2.8.)
Drugą fazą tego układu jest napinanie więzów, tj. początkowo porusza się tylko masa m1, co powoduje stopniowe rozciąganie więzów. Faza ta trwa do chwili, w której siła odkształcająca więzy osiągnie wartość równą sile S2 . Równanie ruchu nie zmienia się, natomiast występują inne warunki początkowe.
![]()
(6.2.9.)
Faza ta trwa aż do chwili, w której napięcie więzów zrównoważy siłę obciążającą więź S2. Wartości ![]()
na końcu drugiej fazy są odpowiednio wartościami początkowymi trzeciej fazy ruchu obu mas. Faza ta rozpoczyna się w chwili ![]()
, gdy siła naciągu liny zaczyna przekraczać wartość S2.
HAMOWANIE PRZY OPUSZCZANIU
Podczas hamowania przy opuszczaniu układ sił jest bardzo podobny jak przy rozruchu - przedstawia nam to ilustracja 6.2.4. Zasadnicza różnica polega na zmianie kierunku ruchu mas oraz na tym, że siła S1 pochodzi od hamulca umieszczonego na wale silnika.
Rys. 6.2.4. Model matematyczny - dwumasowy przypadek hamowania przy opuszczaniu
Warunki początkowe określone są przez prędkość ruchu przy opuszczaniu oraz wydłużenie układu linowego pod wpływem zawieszonego ciężaru
![]()
(6.2.10.)
Ruch opisują dwa równania różniczkowe:

(6.2.11.)
Ruch tego układu składa się z dwóch faz:
− ruch obu mas - trwa do zatrzymania masy m1 siłą hamulca ![]()
− po zatrzymaniu masy m1 ![]()
następuje faza, w której masa m2 wykonuje
swobodne wahania pionowe opisane równaniem:
![]()
(6.2.12.)
HAMOWANIE PRZY PODNOSZENIU
Hamowanie podczas podnoszenia można opisać podobnie jak hamowanie podczas opuszczania - rysunek 6.2.5. Istotna różnica polega tylko na tym, że siła S2 pochodząca od ciężaru współdziała z hamulcem, co przyspiesza proces hamowania.
Rys. 6.2.5. Model matematyczny - dwumasowy przypadek hamowania przy podnoszeniu
Równania ruchu w fazie pierwszej - ruch obu mas:

(6.2.13.)
Faza ta trwa aż do chwili ![]()
![]()
, w której nastąpi zatrzymanie pierwszej masy m1 ,![]()
. Druga faza po zatrzymaniu masy m1 ![]()
to ruch wahadłowy drugiej masy m2:
![]()
(6.2.14)
Obliczenie parametrów występujących w równaniach ruchu
Tab. 6.3.1. Tabela danych obliczeniowych mechanizmu podnoszenia
Nazwa |
Oznaczenie |
Wartość |
Jednostka |
Masa podnoszona |
mQ |
5000 |
[kg] |
Masa zblocza |
mQ0 |
100 |
[kg] |
Wysokość podnoszenia |
L |
10 |
[m] |
Przełożenie wielokrążnika |
iw |
2 |
|
Sprawność wielokrążnika |
ηw |
0,99 |
|
Średnica liny |
d |
14 |
[mm] |
Przekrój liny |
F |
72,5 |
[mm2] |
Średnica bębna |
Db |
0,355 |
[m] |
Moc silnika |
P |
7 |
[kW] |
Obroty silnika |
n |
940 |
[obr/min] |
Moment bezwładności silnika |
Js |
0,05 |
[kgm2] |
Moment bezwładności sprzęgła hamulca |
Jsh |
0,159 |
[kgm2] |
Moment bezwładności koła z1 |
Jz1 |
0,003 |
[kgm2] |
Moment bezwładności koła z2 |
Jz2 |
0,014 |
[kgm2] |
Moment bezwładności koła z3 |
Jz3 |
0,016 |
[kgm2] |
Moment bezwładności koła z4 |
Jz4 |
0,119 |
[kgm2] |
Moment bezwładności sprzęgła bębna |
Jsb |
0,7 |
[kgm2] |
Moment bezwładności bębna |
Jb |
6,08 |
[kgm2] |
Przełożenie 1-st |
i1 |
10,35 |
|
Przełożenie 2-st |
i2 |
10,35 |
|
Sprawność 1-st |
η1 |
0,98 |
|
Sprawność 2-st |
η2 |
0,98 |
|
Sprawność bębna |
ηb |
0,98 |
|
Moment hamowania |
Mh |
200 |
[Nm] |
Luz |
δ |
0,1 |
[m] |
Obliczenie masy zredukowanej − m1
(6.3.1)
− obliczenie momentu zredukowane Jzr1 dla masy m1
![]()
(6.3.2)
![]()
(6.3.3)
![]()
![]()
[kgm2]
zatem: ![]()
[kg]
Obliczenie masy zredukowanej − m2

(6.3.4)
− obliczenie momentu zredukowane Jzr2 dla masy m2
![]()
(6.3.5)
gdzie: ![]()
(6.3.6)

(6.3.7)
![]()
[kgm2]
zatem: ![]()
[kg]
Obliczenie siły wymuszającej S1R dla rozruch

(6.3.8)
− obliczenie M*silnika
![]()
![]()
(6.3.9)
![]()
(6.3.10)
![]()
(6.3.11)
![]()
[1/s]
![]()
[Nm]
![]()
[Nm]
zatem: ![]()
[N]
Obliczenie siły wymuszającej S2R dla rozruchu
(6.3.12)
![]()
[N]
Obliczenie siły wymuszającej S1H dla hamowania
![]()
(6.3.13)
![]()
[N]
Obliczenie siły wymuszającej S2H dla hamowania
(6.3.14)
![]()
[N]
Obliczenie współczynnika sprężystości liny − k
![]()
(6.3.15)
![]()
[N/m]
Obliczenie współczynnika tłumienia − h
![]()
(6.3.16)
![]()
[N⋅s/m]
Równania ruch układu
![]()
(6.3.17)
![]()
− podczas rozruchu
![]()
![]()
− podczas hamowania
![]()
![]()
Podsumowanie
Badania symulacyjne dla wariantów hipotetycznych
Badania symulacyjne dla wariantów hipotetycznych
Obliczenia sprawdzające zachowanie się mechanizmu w stanach nieustalonych
Obliczenia sprawdzające zachowanie się mechanizmu w stanach nieustalonych
Budowa modelu dwumasowego
Budowa modelu dwumasowego
Obliczenia i dobory mechanizmu jazdy
Obliczenia i dobory mechanizmu podnoszenia
Wciągarka przejezdna
Zapis wyników
Charakterystyka
momentu obciążenia
Charakterystyka
momentu silnika Ms
Punkt pracy
ω
ω p
M obc
M
Sprawdzenie poprawności przekładni
Procedury końcowe
Sprawdzenie silnika
Sprawdzenie hamulca
Dobór sprzęgła przybębnowego
Dobór hamulca i sprzęgła hamulcowego
Sprawdzenie poprawności przekładni
Dobór przekładni z katalogu
Obliczenia przekładni zębatej metodą Wissamanna
Wybór sposobu projektu przekładni
Dobór silnika
Wstępne obliczenia do doboru silnika. Wyznaczenie momentów oporu i średniej mocy
Zmiana materiału
Zmiana grubości płaszcza
Dobór materiału na płaszcz bębna i obliczenia wytrzymałościowe
Dobór grubości płaszcza bębna i obliczenia wytrzymałościowe
Obliczanie parametrów geometrycznych bębna
Dobór średnic bębna linowego i krążków linowych
Dobór i sprawdzenie liny
Dobór zblocza
Dane wstępne
Procedury startowe
STOP
Dobór sprzęgieł na wale wolnoobrotowym
Zapis wyników
Sprawdzenie silnika na rozruch i grzanie
Sprawdzenie hamulca
Dobór hamulca, bębna hamulcowego i sprzęgła
Sprawdzenie czy ∆v < ∆vdop
Dobór silnika
Dobór reduktora
Obliczanie oporów jazdy i mocy średniej
Sprawdzenie luzu koło-szyna
Dobór szyn
Dobór kół jezdnych
Naciski na koła jezdne
Dane wstępne
START
m1
m2
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
m1
m2
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
m1
m2
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
m1
m2
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
m1
m2
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
m1
m2
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Wyszukiwarka
Podobne podstrony:
Stalowe - temat 25 -wyboczenie - projekt 4, AGH WIMIR Mechanika i Budowa Maszyn, Rok III, II semest
obróbka ciepla wału, AGH WIMIR Mechanika i Budowa Maszyn, Rok III, I semestr, PKM, Projekty PKM I +
sprawozdanie z izolacyjności akustycznej ekranów, AGH WIMIR Mechanika i Budowa Maszyn, Rok III, I se
Modele i obliczenia mechanizmów wciągarki dok
Sprawozdanie Lab View, AGH WIMIR Mechanika i Budowa Maszyn, Rok III, I semestr, Wibro, Sprawozdania
rowreynold, AGH WIMIR Mechanika i Budowa Maszyn, Rok III, I semestr, PKM, PKM wykłady Salwiński
Wnioski, AGH WIMIR Mechanika i Budowa Maszyn, Rok III, I semestr, Mechanika Płynów, Opływ walca
8051-Maziarz, AGH WIMIR Mechanika i Budowa Maszyn, Rok III, I semestr, PKM, PKM wykłady Salwiński
obróbka pytania, AGH WIMIR Mechanika i Budowa Maszyn, Rok III, I semestr, TOU, TOU egzamin, na egzam
zmora, AGH WIMIR Mechanika i Budowa Maszyn, Rok III, I semestr, PKM, Projekty PKM I + PKM II MEGA KO
Projekt mechanizmu śruboweg2, AGH WIMIR Mechanika i Budowa Maszyn, Rok III, I semestr, PKM, Projekty
Projekt nr 3, AGH WIMIR Mechanika i Budowa Maszyn, Rok III, I semestr, IMIU, Skopiowane z kompa na s
Politechnika Radomska im, AGH WIMIR Mechanika i Budowa Maszyn, Rok III, I semestr, PKM, Projekty PK
projekt8 przekładnia zębata otwarta2, AGH WIMIR Mechanika i Budowa Maszyn, Rok III, I semestr, PKM,
skrawy pytania rusek, AGH WIMIR Mechanika i Budowa Maszyn, Rok III, I semestr, TOU, TOU egzamin, TOU
więcej podobnych podstron