Pyt 7 Przedstaw model strukturalny kg i oblicz jej ruchliwość w stosunku do zdefiniowanej podstawy.
Ogólnie:
Analiza strukturalna
- Pozwala określić liczbę stopni swobody dowolnego odcinka całego ciała na podstawie wzoru:
W=6n - ∑ i
W- liczba stopni swobody (ruchliwość)
n - liczba członów ruchomych, a więc bez podstawy
- liczba par biokinetmatycznych o klasie od I do V
Dla kończyny górnej:
n=24 (człony)
3 połączenia III
6 połączeń IV
15 połączeń V
W=6x24-3x3-6x4-15x5=36
Pyt 8 Przedstaw model strukturalny kończyny dolnej i oblicz jej ruchliwość w stosunku do zdefiniowanej podstawy.
Dla kończyny dolnej
n=22 człony
1 poł III
6 poł IV
15 poł V
W=6x22-1x3-6x4-15x5=30
Kończyna dolna przy miednicy jako podstawie posiada 30 stopni swobody.
Pyt 9 Scharakteryzuj człowieka jako żywą maszynę (biomaszynę). Zdefiniuj pojęcia i podaj przykład receptorów typu: telereceptor, kontaktoreceptor, wisceroreceptor, proprioreceptor.
Zadanie biomechaniczne polega na badaniu ruchu mechanicznego człowieka. Każdy ruch mechaniczny nieodłącznie związany jest z pracą mechaniczną. Urządzenie techniczne, które jest zdolne do produkcji pracy mechanicznej, nazywa się maszyną. Zatem z punktu widzenia biomechaniki możemy rozpatrywać człowieka jako żywą maszynę czyli biomaszynę.
Każda maszyna, a więc i biomaszyna, składa się z trzech głównych układów : ruchowego, zasilania i sterowania. W sensie anatomicznym są to zbiory układów (narządów): kostno- stawowy i mięśniowy , które są odpowiednikami silników i przekładni wraz z parami kinematycznymi; pokarmowy, oddechowy i sercowo-naczyniowy, a także limfatyczny, które są odpowiednikami zbiorników paliwa i akumulatorów praz przewodów rozprowadzających paliwo lub energię elektryczną; nerwowy i dokrewny, które są odpowiednikami układów sterowania w maszynach.
Biomaszyna jako całość posiada wyjścia informacyjne, którymi są eksteroreceptory: wzrok, słuch, powonienie (telereceptory), smak, dotyk, czucie zimna i ciepła (kontaktoreceptory), oraz wejście energetyczne, którymi są jama ustna i jama nosowa. Wyjściami biomaszyny są efektory mieśniowe, które produkują pracę mechaniczną i przekazują za jej pomocą informację o stanach psychicznych u myśleniu (mowa, pismo, gestykulacja, mimika) oraz narządy wydalnicze ( kał, mocz, dwutlenek węgla, itp.) i wydzielnicze (gruczoły: ślinowe, potowe, łojowe, itp.)
W obrębie biomaszyny można wyróżnić dwa podstawowe kanały: informacyjne i energetyczny (zwany zasileniowym). Kanały informacyjne stanowią głównie drogi nerwowe (nerwy i szlaki nerwowe), które przekazują informację (bodźce) od i do układu nerwowego.
Kanałami informacyjnymi dla układu dokrewnego są naczynia krwionośne transportujące hormony głównie do układów zasilania, a także do układów, które nie wchodzą w skład biomaszyny, jak np. układy rozrodcze. Kanałami energetycznymi są głównie naczynia krwionośne i limfatyczne, które doprowadzają substancje energetyczne (paliwo) oraz tlen do wszystkich narządów człowieka. Po zamianie substancji energetycznych na pracę mięśni praca ta porusza kości w stawach lub płyny i gazy powodując ruch człowieka i ruchy w jego narządach wewnętrznych.
Biomaszyna jest nieporównywalnie bardziej złożona strukturalnie i funkcjonalnie od maszyny zbudowanych przez człowieka. Jej układ ruchu ma około 240 stopni swobody i ponad 400 mięśni. W maszynie liczby te przeważnie nie przekraczają kilku stopni swobody i kilku napędów. Układ zasilania w biomaszynie jest rozproszony po całym ciele i źródła energetyczne znajdują się zarówno w komórkach mięśniowych i nerwowych, jak i w komórkach wątroby, krwi, limfy czy tkanki tłuszczowej. Wartość substancji energetycznych jest również zróżnicowana, od wysoko do niskoenergetycznych dzięki czemu biomaszyna może działać szybko, lecz krótko (rozwijając dużą moc), lub wolno i długo. Jasne jest, że tak skomplikowana struktura i funkcja wymaga bardzo złożonego układu sterowania, zawierającego ok. 15-17 miliardów komórek nerwowych. Tak wiele złożoności biomaszyny zezwala na wykonywanie niezliczonych rodzajów ruchów podczas gdy maszyna jest na ogół wyspecjalizowanym urządzeniem, wykonującym ściśle określone przez konstruktora założenia ruchowe.
Biomaszyna płaci za to koniecznością uczenia się każdego ruchu od nowa. Musi opanować technikę ruchu oddzielnie dla każdej czynności.
Po zapoznaniu się z czynnikami wpływającymi na efekt pracy biomaszyny można wydzielić logicznie strukturalne, geometryczne, informacyjne i energetyczne parametry wpływające na rezultat ruchowy (sportowy, pracy, produkcji, pracy inwalidów, itp.) człowieka.
Parametrami strukturalnymi układu ruchu biomaszyny są właściwości określone stosunkami liczbowymi, np. liczba kości, stawów i mięśni, klasa stawów (par kinematycznych) i mięśni (liczba stawów ponad, którymi przebiegają) oraz liczba funkcji mięśni. Parametry strukturalne układu ruchu są wrodzone i w normie wspólne wszystkim ludziom.
Parametry geometryczne posiadają wymiary liniowe (metryczne). Zaliczamy do nich: długości kości (części ciała i dźwignie), mięśni i ich ramion sił oraz przekroje, np. przekrój fizjologiczny i anatomiczny mięśni, powierzchnie osiągalne przez rękę, a także objętości, np. objętość podudzia, pojemność życiowa płuc itp. Długości ciała i ich stosunki są dla biomaszyny parametrami głównie wrodzonymi i składają się na tzw. talent ruchowy danego osobnika. Natomiast przekroje i objętości ciała podlegają zmianom pod wpływem treningu i bezruchu.
Parametry energetyczne zależą głównie od możliwości oraz współdziałania między układami zasilania i ruchu (przy stałych względnie maksymalnych bodźcach przekazywanych z układu sterowania). Określają one zdolność rozwijania mocy przez człowieka w funkcji czasu. Ponieważ moc mechaniczna jest iloczynem siły (momentu) i prędkości.
N= F*v lub N= M*W
to parametry energetyczne decydują o cechach fizycznych: siła (F), prędkość (v), momencie siły (M) i prędkości kątowej (W), oraz o zmianie tych parametrów w czasie, które określane są jako wytrzymałość organizmu N(t) lub jako wytrzymałość siłowa F(t) czy prędkościowa v(t) organizmu. Cechy fizyczne zależą więc głównie od rozwoju układu zasilania u układu ruchu. Podlegają one wytrenowaniu w różnym stopniu. Najwydatniej można wytrenować siłe, średnio - wytrzymałość organizmu, najmniej - szybkość.
Parametry informacyjne decydujące o współdziałaniu między częścią somatyczna układu sterującego i układu ruchu, czyli o procesie sterowania ruchami, które stanowi podstawę techniki i nauczania ruchu oraz o współdziałaniu między częścią wegetatywną układu sterowania i układem zasilania, co współdecyduje o samopoczuciu człowieka, które ma wpływ na jego cechy psychiczne/
W zależności od położenia receptory dzielimy na:
Eksteroreceptory (kontaktoreceptory) - położone w obrębie powłoki wspólnej, odbierają wrażenia ze środowiska zewnętrznego (tzw. czucie eksteroreceptywne) czucie dotyku, ucisku, zmiany temperatury, bólu, smaku; receptory dotyku, kolbka końcowa i ciałko zmysłowe
Proprioreceptory - położone w mięśniach szkieletowych, torebkach stawowych i więzadłach odbierają tzw. czucie propioceptywne o stanie całego ikłądu kostno-stawowo-mięśniowego, ruchu oraz pozycji kończyn i innych części ciała; receptory ścięgnowe, receptory błędnika
Interoreceptory (wisceroreceptory) - położone w narządach wewnętrznych i jamach ciała odbierają tzw. czucie interoreceptywne nazywane również czuciem trzewnym, dotyczące czucia bólu i odczuć pokrewnych oraz zmian chemicznych; receptory stawowe
Telereceptory - odbierają wrażenia zewnętrzne na odległość, tzw. czucie teleceptywne z narządu wzroku, słuchu, powonienia; receptory wzroku, słuchu
BIOMASZYNA- model strukturalny15 segmentowy model budowy ciała człowieka wg H.P. Hanavan`a
(26)Zdefiniuj i scharakteryzuj ogólnie czynniki wpływające na siłę mięśnia (od czego zależy siła mięśnia?).
OD CZEGO ZALEŻY SIŁA MIĘSNI??
-budowa miesnia (ST, FT)
-długosc mm (L)
-predkosc skracani wł mm
-stan energetyczny mm i organizmu
-temp. mm i otaczajacych go tkanek
-stopnia pobudzenia m
-wieku
-płci
-stopnia wytrenowania
I zalezy od 4 parametrów ogólnie:
1. Strukturalnych
2geometrycznych
3.informacyjnych
4.energetycznych
(30)Scharakteryzuj zasady pomiaru siły mięśni (momentu siły) w warunkach statyki.
Zasady pomiaru sił(momentów) mięśni:
- ergonomiczność i bezpieczeństwo stanowisk pomiarowych
- standardowe pozycje pomiarowe
- eliminacja momentów siły ciężkości segmentu ciała
- motywacja(mvc)
- standardowa rozgrzewka
- stabilizacja
- przeniesienie siły segmentu ciała (mięśni) na czujnik siły
- przerwy odpoczynkowe
30. Scharakteryzuj zasady pomiaru siły mięśni (momentu siły) w warunkach statyki.
Metody pomiaru i oceny siły mięśniowej możemy podzielić na dwie duże grupy:
Pośrednie i bezpośrednie.
Metody pośrednie oceniają wielkość i zmiany siły mięśniowej na podstawie wyników testów ruchowych przeprowadzanych na badanych. Istnieje wiele testów oceny siły mięśniowej, badających poszczególne grupy mięśniowe (np. liczba podciągnięć w zwisie, liczba unoszeń w podporze, liczba przysiadów w określonym czasie, liczba siadów z leżenia w określonym czasie itd.).
Metody bezpośrednie sprowadzają się do pomiaru momentów sił mięśniowych przeprowadzanych w warunkach statyki (praca izometryczna mm.). Dzieje się tak dlatego, że siła mięśni w czystej postaci jest niedostępna badaniu. Nie pozwala na to brak możliwości pomiaru na żywym osobniku wielkości ramienia siły mięśniowej, kąta pod jakim mięsień przyczepia się do kości, kierunku działania siły mięśnia.
Wobec tego w układzie par biokinetycznych pomiar „bezpośredni” siły mięśniowej polega na pomiarze momentu siły na zasadzie zrównoważenia momentów siły mięśni (nieznanych) poprzez momenty oporu (znane).
Warunkiem niezbędnym przeprowadzenia pomiaru jest zapewnienie równowagi pomiędzy momentami sił zewnętrznych - oporu (![]()
) i mięśniowych (![]()
).
Ponieważ nie możemy zmierzyć ani siły mięśniowej (F) ani jej ramienia (r) zatem o wielkości momentu siły mięśniowej wnioskujemy na podstawie momentu siły zewnętrznej (![]()
), ponieważ zarówno wielkość siły oporu (R) jak też jej ramię możemy nie tylko zmierzyć, ale również ustalić. Wolno nam to uczynić jedynie pod warunkiem zachowania statyki, co pozwala nam na utożsamienie wartości obu momentów (I zasada dynamiki Newtona).
Ustalanie pozycji pomiarowej - należy zadbać aby część ciała poddana badaniu była ułożona stabilnie w określonej pozycji. Warunkiem zbudowania prawidłowego stanowiska pomiarowego jest zachowanie kątów prostych pomiędzy częściami ciała, pomiędzy kierunkiem siły oporu i mierzoną częścią ciała oraz pomiedzy kierunkiem siły oporu i układem stabilizującym.
Ustabilizowanie sąsiednich odcinków ciała
Zamierzenie ramienia siły oporu (I)
Wykonanie pomiaru, zapisanie wyniku
Dopilnowanie, aby siła oporu była tka duża, by wykluczyć ruch. Pomiaru należy dokonywać w staryce, zatem skurcz mięśnia musi być izometryczny. Pomiar misi być chwilowy, bowiem mierzymy siłę maksymalną - z pominięciem techniki i taktyki ruchu.
Pyt. 13 - Zdefiniuj pojęcia:
masa - miara bezwładności, jest to ilość energii i materii, z której zbudowane jest ciało. Masa jest wartością skalarną określoną liczbowo i niezależną od środowiska zewnętrznego.
środek masy - punkt skupienia mas całego układu (ciała). Środek masy pod wpływem sił zewnętrznych, porusza się tak, jakby w nim była skupiona cała masa i jakby w nim była przyłożona siła F, równa sumie geometrycznej wszystkich sił zewnętrznych działających na układ. Siły wewnętrzne nie mogą zmieniać ruchu środka masy.
środek ciężkości - punkt przyłożenia wypadkowej siły ciężkości wszystkich elementów ciała.
- środek ciężkości pręta o jednakowym przekroju leży w połowie jego długości
- środek ciężkości płaskich, regularnych figur leży w ich środku geometrycznym
- środek ciężkości płaskiej figury w postaci trójkąta, leży na przecięciu się linii środkowych.
- środek ciężkości równoległoboku, w szczególności prostokąta, leży na przecięciu się przekątnych.
- środek ciężkości brył mających środek symetrii, jak np. kula, elipsoida, walec, cylinder, obręcz, sześcian, prostopadłościan itp. leży w środku symetrii tych brył.
promień środka masy (promień wodzący środka masy) - prosta poprowadzona z dowolnie wybranego bieguna (punktu) O, łącząca ten biegun ze środkiem masy danego ciała (lub jego części) lub innej bryły sztywnej. Promień środka masy jest oznaczony wzorem:
rc = suma mi * ri / suma mi, gdzie mi - suma mas poszczególnych części badanego ciała, a ri - odległość każdego z tych elementów od osi obrotu.
e) bezwładność - właściwość wszystkich ciał materialnych, polegająca na tym, że w inercjalnym układzie odniesienia, jeśli na ciało nie działa siła lub działające siły równoważą się, to porusza się ono ruchem jednostajnym lub spoczywa. Zmiana prędkości ciała wymaga działania siły. Bezwładność ciał postulowana jest przez zasady dynamiki Newtona. Miarą bezwładności ciała jest jego masa, natomiast jej odpowiednikiem w ruchu obrotowym - moment bezwładności.
f) moment siły ciężkości - iloczyn siły ciężkości ciała i ramienia działania siły ciężkości. Ramię działania siły to najkrótsza odległość od osi obrotu do kierunku działania siły.
Pyt. 14 - Zdefiniuj pojęcia:
a) Siła jest miarą oddziaływania ciał na siebie. Jest to wielkość wektorowa posiadająca: wartość, kierunek, zwrot i punkt przyłożenia. Oznaczamy ją symbolem F. Jednostką siły jest [Niuton] 1[N] = [kg m/s2]
Skutki działania sił dzielimy na:
statyczne (odkształcenie ciała - zmiany jego kształtu i/lub wymiarów)
dynamiczne (zmiana prędkości lub kierunku ruchu ciała, zatrzymanie lub wprawienie w ruch)
b) Ciężar, siła ciężkości - siła z jaką Ziemia lub inne ciało niebieskie przyciąga dane ciało, w układzie odniesienia związanym z powierzchnią ciała niebieskiego. Ciężar jest wypadkową sił przyciągania grawitacyjnego i siły odśrodkowej wynikającej z ruchu obrotowego określonego ciała niebieskiego.
c) Siła bezwładności (siła inercji, siła pozorna) - siła pojawiająca się w nieinercjalnym układzie odniesienia, będąca wynikiem przyspieszenia tego układu. Siła bezwładności nie jest oddziaływaniem z innymi ciałami, jak to ma miejsce przykładowo w sile klasycznie rozumianej grawitacji. Jeżeli zjawisko, w którym pojawiła się siła bezwładności, opisywane jest w inercjalnym układzie odniesienia, wówczas siła bezwładności nie występuje, zachowanie się ciał w takim układzie można wyjaśnić działaniem innych sił.
Siła bezwładności działająca na ciało o masie m znajdujące się w nieinercjalnym układzie poruszającym się z przyspieszeniem a wyrażona jest wzorem:
We wzorze tym minus oznacza, że zwrot siły bezwładności jest przeciwny do zwrotu przyspieszenia układu.
d) Siła zewnętrzna - w wytrzymałości materiałów to siły działające na ciało - konstrukcje lub jej element. Przykładami sił zewnętrznych są m.in. przyciąganie ziemskie, wiatr, prądy wody, tarcie, reakcja podłoża.
e) Siły wewnętrzne są to siły oddziaływania pomiędzy elementami ciała, lub układu ciał. Są nimi np. siły wytwarzane przez mięśnie, opór tkanek biernych, bezwładność.
f) Tarcie (pojęcie fizyczne) (opory ruchu) to całość zjawisk fizycznych towarzyszących przemieszczaniu się względem siebie dwóch ciał fizycznych (tarcie zewnętrzne) lub elementów tego samego ciała (tarcie wewnętrzne) i powodujących rozpraszanie energii podczas ruchu.
Tarcie zewnętrzne występuje na granicy dwóch ciał stałych. Tarcie wewnętrzne występuje przy przepływie płynów, jak i deformacji ciał stałych, pomiędzy obszarami przemieszczającymi się względem siebie.
Siła występująca w zjawiskach tarcia nazywana jest siłą tarcia.
g) siła reakcji - siła przeciwna do siły ją wywołującej. Siła reakcji jest przyłożona do punktu działania siły, która ją wywołała, działa w tym samym kierunku, ma taką samą wartość, a zwrot przeciwny do tej siły
h) siła czynna - siła przyłożona na powierzchni ciała i pochodząca od zewnętrznych obciążeń lub siła przyłożona wewnątrz ciała np. siła grawitacji. Siłami czynnymi są także: siła pobudzonych mięśni, wiatr czy prąd wody.
i) siła bierna - reakcja w miejscu styku dowolnego ciała z podłożem lub elementu z innym elementem. Siłami biernymi oprócz reakcji podłoża są np. tarcie, opór wody, opór powietrza, opór tkanek biernych, siły bierne mięśni.
j) siła oporu - siła działająca na poruszające się ciało fizyczne, która przeciwdziała poruszaniu się tego ciała.
k) siła aerodynamiczna - siła reakcji wywierana przez gaz na ciało w nim poruszające się (np. przez powietrze na samolot); składowa tej siły równoległa do kierunku ruchu ciała o zwrocie przeciwnym niż prędkość, stanowi opór aerodynamiczny, zaś składowa prostopadła do tego kierunku - siłę nośną; w ruchu poziomym siła nośna równoważona jest przez siłę ciężkości lecącego ciała; s.a. jest zależna od gęstości gazu, prędkości poruszającego się ciała, jego kształtu i powierzchni.
siła hydrodynamiczna, fiz. siła, z jaką ciecz działa na zanurzone w niej (całkowicie lub częściowo) i poruszające się ciało, np. płat nośny wodolotu, kadłub statku
Pyt. 15 - Scharakteryzuj sposoby wyznaczania położenia ogólnego środka masy (OSM) człowieka: metodami pośrednimi (zastosowanie dźwigni jednostronnej) oraz bezpośrednimi (zastosowanie metody sumy momentów sił / lub składania sił).
Zastosowanie dźwigni jednostronnej oraz metodę sumy sił równoległych (graficzną) zamieściłem na fotkach. Oto metoda analityczna, czyli sumy momentów sił:
- w metodzie wykorzystujemy bezpośrednio wzory:
x = suma xi * mi / m oraz y = suma yi * mi / m
opisujące współrzędne położenia środka masy, zastępując masy odpowiednimi ciężarami.
- po wyznaczeniu położenia środków ciężkości poszczególnych części ciała, postępujemy następująco:
1. Rysujemy układ współrzędnych tak, aby cała sylwetka znalazła się w obrębie dodatnich wartości obu współrzędnych.
2. Mierzymy linijką współrzędne środków środków ciężkości x i y.
3. Zapisujemy wartości x-ów i y-ów do karty zaliczeń.
4. Wyliczamy momenty sił mnożąc wartości współrzędnych przez względne ciężary - zgodnie z tzw. prawem Varignona (suma momentów sił składowych równa się momentowi wypadkowemu układu sił równoległych na płaszczyźnie, względem tego samego punktu) liczymy Mi.
5. Sumujemy momenty sił oddzielnie dla x-ów i y-ów (wyliczamy sumę momentów sił).
6. Wyliczamy współrzędne OSM na podstawie wzorów:
x = suma Mix / Qix, czyli (Q1*x1 + Q2*x2 +…Qn*xn) / Q1 + Q2 +…Qn
y = suma Miy / Qiy, co rozpisuje się analogicznie jak wyżej.
7. Oznaczamy na układzie współrzędnych środek masy o współrzędnych x i y.
Znaczenie tej metody - znajomość współrzędnych położenia OSM (OSC) człowieka na zdjęciu bądź filmie pomiarowym umożliwia obliczenie podstawowych i pochodnych wielkości kinematycznych (droga, czas, prędkość, przyspieszenie) oraz dynamicznych (siła, moc, praca, energia).
Pytanie 16 przedstaw wielkości mas i promieni środków mas głównych segmentów ciała człowieka
Pojęcia wytłumaczone są w pytaniu 13, natomiast wielkości tych mas wyliczamy wykorzystując równanie regresji.
Wyliczając wielkości poszczególnych segmentów wykorzystujemy masę całego ciała i względne ciężary q części ciała człowieka wyrażone w procentach.
Głowa 0,07 G czyli 7 % masy ciała
Tułów 0,43 G
Ramię 0,03 G
Przedramię 0,02 G
Ręka 0,01 G
Udo 0,12 G
Podudzie 0,05 G
Stopa 0,02
Np. głowa to 7% z 80 kg masy ciała danego osobnika.
Można też wykorzystać wzory Clauser i Zatziorsky ale na ćwiczeniach tych wzorów nie używaliśmy, jedynie na kole babka nam podała gotowe wzory a my tylko podstawialiśmy wielkość obwodu głowy i masy ciała. Gdyby ktoś był zainteresowany wszystko jest w książce BOBER i ZAWADZKI
Pytanie 17 klasyfikacja dźwigni biomechanicznych. Pojęcie zysku mechanicznego dźwigni- charakterystyka
Poszczególne dźwignie będą opisane w następnych pytaniach.
Podział dźwigni
Dwustronna (I rodzaj)
Stawowy punkt podparcia dźwigni znajduje się między miejscami przyłożenia siły mięśniowej i siły obciążenia. Jeśli suma momentów działających sił wynosi zero, to dźwignia pozostaje w równowadze.
Przyjmując ,żerami działania siły mięśniowej dźwigni można zapisać w postaci :
Fm x Lm = Fo x Lo czyli Fo/Fm = Lm/Lo
Oznacza to, że w stanie równowagi stosunek sił działających na dźwignię jest równy odwrotności stosunku długości ramion działania tych sił. W biomechanice stosunek ten nazywa się ZYSKIEM MECHANICZNYM ( ZM) DŹWIGNI.
ZM = Lm/Lo
Wartość ZM może się zmieniać w dowolnych granicach, co oznacza, że stan równowagi można osiągnąć dla dowolnych sił przez zmianę ramion działania tych sił. W ramach pojedynczego stawu przyczepy poszczególnych mięsni mają różne lokalizacje i dlatego wspomniany zysk mechaniczny można odnosić do konkretnego mięśnia.
Jednostronna (która dalej dzieli się na)
II klasy (II rodzaj)
To rodzaj dźwigni w której ramię działania siły mięśniowej jest zawsze krótsze od ramienia obciążenia. Zysk mechaniczny w takiej dźwigni przyjmuje wartości mniejsze od jedności -zazwyczaj 0,1 lub mniej.
III klasy (III rodzaj)
To dźwignia w której ramią przyłożenia siły mięśniowej jest dłuższe od ramienia siły obciążenia. Zysk mechaniczny dźwigni zaliczanych do trzeciej klasy jest zawsze większy od 1.
PYTANIE 18 szczegółowa charakterystyka dźwigni dwustronnych na przykładach narządu ruchu
Dźwignia dwustronna występuje gdy siły mięśnia i oporu lub dwóch antagonistycznych mięśni są przyłożone po przeciwnych stronach względem punktu podparcia (osi obrotu w stawie)
Przykład dźwigni tworzą :staw łokciowy z osią obrotu (O), przedramię obracające się w osi poprzecznej tego stawu względem ramienia oraz dwa antagonistyczne mięśnie : zginacz i prostownik. Na kości przedramienia działają : mięsień trójgłowy ramienia ( Ftb), którego przyczep końcowy znajduje się na wyrostku łokciowym, a po przeciwnej stronie względem osi obrotu przyłożona jest siła mięśnia dwugłowego ramienia Fbb. Równowaga takiej dźwigni jest zapeniona gdy Ftb x rtb = Fbb x rbb , a na dźwignię nie działają żadne inne momenty sił.
48)Zdefiniuj pojęcie chodu
Chód jest lokomocją polegającą na przemieszczaniu masy ciała, skupionej w środku ciężkości wzdłuż drogi wymagającej najmniejszego wydatku energetycznego. Natomiast lokomocja to cykliczne poruszanie się, związane ze zmianą miejsca położenia.
Chód człowieka jest formą lokomocji, w której funkcję podporowo-napędową spełniają kończyny dolne, pewną zaś rolę równoważną dla ich pracy - kończyny górne.
(47)Scharakteryzuj podział ruchów dowolnych - na podst. teorii sterowania N.A. Bernstejna
Ruchy dowolne dzielą się na balistyczne i ciągłe (precyzyjne).
Balistyczne są sterowane według reguły ANTE-POST FACTUM (przed i po główną częścią). Czas ich trwania to 0,1-0,2s.
Ciągłe są sterowane według reguły IN FACTO (w trakcie przebiegu)
(49) Scharakteryzuj strukturę biokinematyczną chodu normalnego (standardowego): fazy i okresy cyklu chodu, trajektoria OSM, mechanizm zapoczątkowania chodu wyrażony w zmianie położenia OSM.
Chód jest ruchem cyklicznym i wyodrębniamy w nim powtarzające się dwie fazy:
Faza podporu [FP] 60% cyklu
Kryteria: kontakt stopy lub jej części z podłożem.
Okresy:
FP 1 -> Podpór na pięcie [10% cylku]
FP 2 -> Podpór płaski na całej stopie [30% cyklu]
FP 3 -> Podpór na przodostopiu i palcach [20% cylku]
Faza wymachu [FW] (wahadła) 40% cyklu
Kryteria: zmiana przyspieszenia kończyna wymachowej.
Okresy:
FW 1 -> okres przyspieszenia [13% cyklu]
(okres czynny - głównie dla zginaczy stawu biodrowego)
FW 2 -> okres przeniesienia [17% cyklu]
(okres bierny - działa głównie siła bezwładności)
FW 3 -> okres hamowania [10% cyklu]
(okres czynny - działają głównie prostowniki st. biodrowego i zg. st. kolanowego)
Okres podwójnego podporu [OPP] - faza przejściowa
Kryteria: równoczesny podpór na obu KKD np. lewa noga w FP 3, a prawa w FP 1
Trajektoria OSM
Tor nie jest prostolinijny i prędkość ruchu nie jest stała.
W płaszczyźnie strzałkowej: regularna oscylacja w pionowa, której maksima przypadają na środek fazy podporu[FP 2] a minima na okres podwójnego podporu [OPP]. Wielkość oscylacji (przeciętnie 4cm) zależy m.i od dł kroku.
W płaszczyźnie poprzecznej: oscylacja boczna, o amplitudzie dwukrotnie mniejszej(niż w pł strzałkowej)2cm, zależy od sposobu stawiania stóp od linii środkowej wyznaczającej kierunek chodu(np. skrajne lewe położenie przypada na środek fazy podparcia lewej). Częstotliwość omawianego ruchu jest dwukrotnie mniejsza niż oscylacje poziome
Wzniesienie OSMprzypada na każdą fazę pojedynczego podporu(na każdy krok), skrajne lewe/prawe położenie przypada odpowiednio na fazę kończyny lewej/prawej.
Największy przyrost prędkości przypada na koniec fazy podparcia, największe opóźnienie w okresie przemieszczania się OSM na kończynę podporową(początek okresu podwójnego podparcia).
Mechanizm zapoczątkowania chodu wyrażony w zmianie położenia OSM.
Rozpoczęcie chodu można określić jako wytrącenie ciała ze stanu równowagi w określonym, zamierzonym kierunku. Przebieg: spadek napięcia mięśni(brzuchaty łydki, czworogłowy, pośl. wielki, prost. grzbietu) rzut pionowy OSM zakreśla tor w bok i w tył, a następnie w przód, stwarzając korzystny moment siły dla mięśni kończyny dolnej w celu przesunięcia masy ciała w przód i wykonania pierwszego kroku.
(50)Scharakteryzuj szczegółowe zmiany położenia kątowego stawów: biodrowego, kolanowego i skokowo-goleniowego w cyklu chodu (dla płaszczyzny strzałkowej).
Faza podporu:
Kontakt piętym z podłożem: stopa w niewielkim zgięciu grzbietowym, st kolanowy zgięcie 5°, zgięcie w st biodrowym 30°.
Dalej następuje ekscentryczne opuszczanie stopy, zg podeszwowe 15°, staw kolanowy ugina się do 20°, staw biodrowy nadal w pewnym zgięciu.
Następnie (biodro, kolano i st skokowy- w jednej linii) dochodzi do zgięcia grzbietowego 10° w st skokowym, kolano - wyprost do 5°, biodro- wyprost do zera.
Później dochodzi do zgięcia podeszwowego 15°(przeniesienie ciężaru na przodostopie), kolano wyprostowane, biodro - wyprost 15°
Faza wymachu:
Ze zgięcia podeszwowego przejście do pozycji neutralnej, kolano - zgięcie 60°, biodro- z max wyprostu do zgięcia 40°
Zgięcie grzbietowe 15°, kolano - wyprost do 5°, biodro - zmniejszenie zgięcia do 30°(dalej kontakt pięty z podłożem, faza podporu)
Przybliżone zakresy ruchów umożliwiające prawidłowy mechanizm chodu:
Staw skokowy: zg grzbietowe15°, zg podeszwowe 15°
Staw kolanowy: wyprost do 0°, zgięcie 60°
Staw biodrowy: wyprost 15°, zgięcie 40°
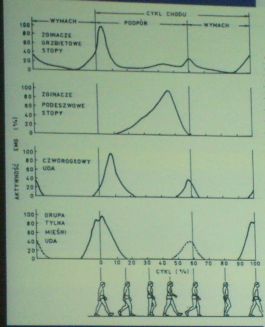
(51) Scharakteryzuj strukturę biodynamiczną chodu standardowego: koordynacja neuromięśniowa wybranych zespołów mięśniowych; dynamiczna reakcja podłoża -przebiegi czasowe pionowej i poziomej składowej.
Koordynacja neuromięśnowa:
Aktywność EMG pojawia się fazowo
Maksymalne wartości pobudzenia utrzymywane są bardzo krótko
Na granicach fazy najczęściej występuje aktywność EMG
Zginacze grzbietowe stopy: max aktywność chwilę po momencie podporu pięty, spada stromo oscylując fazie podporu właściwego przodostopiu na niewielkim poziomie. W fazie wymachu, włączają się przed momentem podporu piętą , przeciwdziałając opadaniu stopy w dół. Są aktywne również na początku fazy wymachu zginając grzbietowo stopę po jej oderwaniu od podłoża.
Zginacze podeszwowe stopy: są aktywne wyłącznie w fazie podporu, max aktywność osiągają łagodnie z pewnym opóźnieniem do fazy podporu piętą. Spada gwałtownie w końcu fazy podporu. W fazie wymachu, cisza bioelektryczna mięśnia.
Mięsień czworogłowy: włącza się z wyprzedzeniem przed ustawieniem pięty na podłożu(jeszcze w fazie wymachu). Max pobudzenie występuje w momencie ekscentrycznego sterowania zginaniem stawu kolanowego, po czym dość szybko spada do zera. Druga faza pobudzenia na granicy końca fazy podporu i początkiem fazy wymachu.
Grupa tylna mięśni uda: (to moja interpretacja, tamto dyktował dworas) są czynne głównie na granicy fazy wymachu i podporu, hamują ruch wymachowy kończyny, a następnie zginają ją do tyłu.
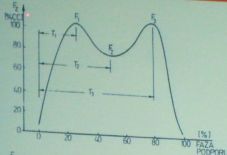
Dynamiczna reakcja podłoża -przebiegi czasowe pionowej i poziomej składowej. (mówił że trzeba rysować wykresy)
Składowa pionowa (Z): w normie siodło z dwoma łękami
„Ł. Tylny” (FP1/FP2) tzw. pierwsze dociążenie podłoża, charakteryzuje sposób obciążania pięty. Wartości: ok. 120%CC (na rys F1)
„siedzisko” (FP2) Odciążenie podłoża (cała stopa w kontakcie), charakteryzuje dynamikę wymachu kończyny przeciwnej. Wartość: 80%CC (na rys F2)
„Ł. Przedni” (FP2/FP3) tzw. drugie dociążenie podłoża, charakteryzuje sposób obciążania przodostopia. Wartości: 120%CC (na rys F3)
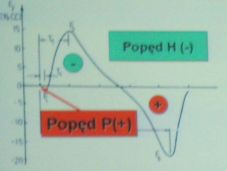
Składowa pozioma (Y):
Kontakt pięty z podłożem -> siła działa z tyłu do przodu, nadaje popęd przyspieszający(krótko)
Loading responce -> siła działa z przodu do tyłu, nadaje popęd hamujący.
Po tym jak biodro znajduje się przed stopą, znów mamy popęd przyspieszający.(siła działa z tyłu do przodu)
stymulować masę kości
właściwie tłumić drgania
być odporne na przeciążenia
trwałe
nie powodować odczynów alergicznych
innych właściwości materiałów
braku elastycznej chrząstki
braku środka smarującego - mazi
braku torebki stawowej
braku wspomagających mechanizmów smarowania (weeping lubrication)
Bezcementowe - mocowane bezpośrednio w tkance kostnej
Trzpienia
Głowy
Panewki
Styk ruchowy „głowa - panewka”
Styk „trzpień-cement-kość”
stymulować masę kości
właściwie tłumić drgania
być odporne na przeciążenia
trwałe
nie powodować odczynów alergicznych
innych właściwości materiałów
braku elastycznej chrząstki
braku środka smarującego - mazi
braku torebki stawowej
braku wspomagających mechanizmów smarowania (weeping lubrication)
Niezwiązane
Częściowo związane
Całkowicie związane
16. (61) Scharakteryzuj biomechanikę stawu biodrowego
Siły działające na staw biodrowy dzielimy na :
a) zewnętrzne - siła przyciągania ziemskiego, oddziaływanie podporowe oraz siły z jakimi inne ciała działają na ciało człowieka
b) wewnętrzne - siły wynikające z działania mięśni
Staw biodrowy przenosi obciążenia statyczne i dynamiczne wynikające z masy ciała, siły mięśni działających na staw oraz przyspieszenia i przyciągania ziemskiego. Kąty i kierunek wektorów sił mięśni działających na staw biodrowy są zmienne - zależą od ich funkcji i fazy chodu.
- Dauwels rozpatruje 2 sytuacje biomechaniczne w stawie biodrowym : fazę obciążenia obunożnego i fazą stania na jednej kończynie dolnej. Podczas podparcia na obu kończynach zakłada się, iż w środku ciężkości S4 obciążenia od głowy, tułowia i kończyn górnych stanowią 62% masy ciała, natomiast na jednej nodze staw biodrowy przenosi obciążenia od głowy, tułowia, kończyn górnych i 2 kończyny a środek ciężkości jest umiejscowiony w S5 i stanowi 81% masy.
Każda zmiana położenia środka ciężkości w stosunku do osi ciała wywołuje zmianą obciążeń w stawie biodrowym tj. zmianą sił i kierunku działania mięśni oraz udziału nowych grup mięśniowych utrzymujących ciało w stanie równowagi.
Podstawowe znaczenie w obciążeniu stawu biodrowego, a tym samym w modelowaniu mają:
- mięśnie pośladkowe zwłaszcza dla obciążeń boczno- przyśrodkowego zginania
- mięsień dwugłowy uda dla oddziaływań przednio - tylnych
- pasmo biodrowo - piszczelowe odwodzicieli
- pasmo odwodzicieli, które ma większe znaczenie w obciążeniu k. udowej niż przywodzicieli
- mięśnie rotatorów
16. (62) scharakteryzuj alloplastykę st. Biodrowego
Celem alloplastyki jest odtworzenie uszkodzonego stawu, likwidacja bólu, umożliwienie ruch i podstawowych czynności ruchowych jak najbardziej zbliżonych do naturalnych.
Endoprotezy powinny:
Niestety materiały jak i technologie nie zapewniają pracy endoprotezy takiej jak zdrowego stawu
Endoprotezy nie są w stanie zapewnić odtworzyć warunków tribologicznych takich jak w zdrowych stawach w wyniku:
Bez względu na rodzaj budowy możemy je podzielić na :
- Cementowe - osadzane na akrylowy cement
Stosowane obecnie endoprotezy stawu biodrowego składają się z 3 podstawowych elementów :
Obecnie produkowane ze stopu tytanu, nie zawierają wanadu (wada poprzednich wersji).Pokrywa się je też czystym tytanem lub innymi substancjami ułatwiającymi przerost endoprotez bezcementowych
Obecnie metalowe lub ceramiczne
Układ ruchowy „głowa endoprotezy-panewka” stanowi podstawowy element
endoprotezy tj. parę trącą. Od doboru materiałów na tę parę zależą zarówno
opory tarcia jak też odporność na zużycie endoprotezy
Od wielu lat panewki wykonywane są z polietylenu
W stawie biodrowym z zaimplantowaną endoprotezą można wyróżnić dwa podstawowe węzły tribologiczne:
17. (63) Scharakteryzuj biomechanika stawu kolanowego
Obciążenia stawu kolanowego mogą przybierać znaczne wartości i zależą od wykonywanych czynności :
- osiowe obciążenia podczas chodzenia w poziomie lub po schodach mogą być 1,3 razy większe od ciężaru ciała a podczas biegu nawet ponad 2 razy. Momenty sił wynikające z oddziaływania sił mięśniowych osiągają wartość 50 Nm podczas chodzenia.
- w zależności od fazy ruchu zmienia się także kierunek działania wektorów sił. W 1 fazie reakcje podparcia z piętą są przenoszone przez powierzchnie stawu kolanowego oraz więzadła rzepkowe a w czasie podparcia stopy - obciążenia przenoszone są na tylne struktury więzadłowo - mięśniowe. Podczas ruchu obciążenia są zmienne, zależne od kontaktu stopy z podłożem i zakresu ruchu podudzia.
- przeciążenia stawu często powodują uszkodzenia struktur kolana, najczęściej w wyniku aktywności sportowej. Uszkodzeniu ulegają: więzadła, łękotka, torebka stawowa i chrząstka stawowa
W biomechanice stawu kolanowego dominuje model Maqueta rozważający obciążenia w różnych płaszczyznach ( strzałkowa, czołowa ) jak i czynnościach ( stanie na obu i jednej nodze)
- podczas stania na obu stopach kolana obciążone są częścią masy ciała powyżej kolan (85%) a wypadkowe przechodzą przez geometryczny środek kolana
- podczas stania na jednej stopie obciążenia wynikają z oddziaływania masy całego ciała(93%).
Obciążenia w stawie rozłożono na 2 składowe - siły działające w stawie udowo - piszczelowym i udowo - rzepkowym. Wartości sił zależą od parametrów geometrycznych stawu, możliwości ruchu, warunków anatomicznych kończyny, zmiany kątów między osiami głównymi elementów strukturalnych, zmiany wartości sił mięśniowych oraz wartości oddziałujących mas elementów ciała. Na zmiany obciążeń stawu wpływają zmiany powierzchni stawu np. deformacje
Najczęstszymi objawami przeciążeń w stawie jest przemieszczenie oddziaływania siły wypadkowej obciążającej staw w stronę przyśrodkową lub boczną. Natomiast zmiany w biomechanice stawu związane z chorobowymi zmianami budowy geometrycznej kończyny dolnej są wynikiem powstania dodatkowych naprężeń skręcających i wynikających z przemieszczenia się siły obciążającej
17. (64) scharakteryzuj alloplastykę st. kolanowego
Celem alloplastyki jest odtworzenie uszkodzonego stawu, likwidacja bólu, umożliwienie ruch i podstawowych czynności ruchowych jak najbardziej zbliżonych do naturalnych.
Endoprotezy powinny:
Niestety materiały jak i technologie nie zapewniają pracy endoprotezy takiej jak zdrowego stawu
Endoprotezy nie są w stanie zapewnić odtworzyć warunków tribologicznych takich jak w zdrowych stawach w wyniku:
Rodzaje:
Używa się endoprotez cementowych i dużo rzadziej bezcementowych.
Niezwiązane
Są dwuczęściowe, typu saneczkowego. Część udowa metalowa osadzana jest na kłykciu udowym. Część piszczelowa jest metalowa z nakładką polietylenową
Całkowite
Mają sztywne połączenie kości udowej z piszczelową - typu zawiasowego, pozwalające tylko na ruchy zginania i wyprostu
W przypadku uszkodzenia więzadła krzyżowego tylnego stosuje się endoprotezę kłykciową z tylną stabilizacją, która spełnia rolę tego więzadła.
Endoprotezy kłykciowe są obecnie najczęściej stosowanymi endoprotezami
64. Zabieg operacyjny alloplastyki całkowitej (endoprotezoplastyki) stawu kolanowego, wykonywany jest głównie u osób starszych, u których wyczerpano już możliwości leczenia zachowawczego. Polega on na wycięciu zniszczonych części stawu i zastąpieniu ich elementami metalowymi lub plastikowymi [7,8,9].
Głównym celem zabiegu jest:
- uwolnienie chorego od dokuczliwych dolegliwości bólowych lub przynajmniej wyraźne ich ograniczenie;
- korekta zaburzonej osi stawu oraz poprawa jego stabilności;
- przywrócenie w jak największym stopniu prawidłowego zakresu ruchów oraz prawidłowej funkcji statycznej i dynamicznej stawu (chodzenie, stanie, siadanie, itp.);
- poprawienie jakości życia chorego.
Funkcjonowanie nowego, sztucznego stawu, by sprostać związanym z nim oczekiwaniom, powinno przebiegać bez zakłóceń, co wymaga m.in. odpowiedniego doboru protezy, bezbłędnej techniki operacyjnej, właściwego postępowania przed- i pooperacyjnego oraz odpowiedniej aktywności fizycznej chorego po operacji.
Liczba stosowanych obecnie w chirurgii stawu kolanowego różnego typu i rodzaju endoprotez jest znaczna.
Produkujące je firmy najczęściej prezentują szeroko rozbudowane systemy modularne, które w znacznym stopniu ułatwiają chirurgom prawidłowe implantowanie protez. Endoproteza stawu kolanowego, w większości przypadków, składa się z 3-4 elementów: anatomicznego komponentu udowego, komponentu piszczelowego z wkładką różnej grubości oraz części rzepkowej. Części udowe protezy produkowane są ze stopów tytanu (Ti) lub kobaltu i chromu (CoCr), mogą być uniwersalne bądź przystosowane do lewej lub prawej kończyny. Podstawowa część piszczelowa jest również metalowa, najczęściej ze stopu kobaltu i chromu, natomiast wkładka piszczelowa oraz część rzepkowa wykonane są z polietylenu o wysokiej gęstości (ultra-high-molecular-weight polyethylene - UHMWPE). W wielu systemach protez komponenty piszczelowe występują w kilku wersjach: część metalowa i wkładka polietylenowa oddzielnie lub razem, część piszczelowa oraz wkładka stanowiąca jedną całość wykonaną z polietylenu (all polly)bądź wkładka nie zamocowana na stałe do metalowej części piszczelowej, posiadająca określoną ruchomość (mobile bearing). Ogólny ciężar protezy w zależności od jej rozmiarów wynosi 300-500 g. Główne różnice pomiędzy poszczególnymi typami endoprotez dotyczą odmienności w systemie mocowania poszczególnych komponentów do kości udowej lub piszczelowej, a tak że kształtu zasadniczych części protezy.
Dostępne na rynku światowym endoprotezy stawu kolanowego można klasyfikować z uwzględnieniem: obszaru wymiany stawu, stopnia swobody ruchu nowego stawu, sposobu zamocowania elementów protezy oraz dostosowania protezy do rozległości wycięcia więzadła krzyżowego tylnego (posterior crucial ligament PCL).
Klasyfikacja endoprotez stawu kolanowego uwzględnia:
- obszar wymiany stawu: jednoprzedziałowe (unicompartmental), dwuprzedziałowe (bicompartmental)oraz trójprzedziałowe (tricompartmental);
- stopień swobodnego ruchu stawu: niezwiązane (unconstrained), częściowo związane (semiconstrained)
i całkowicie związane (fully constrained);
- sposób zamocowania elementów protezy: cementowe (cemented), bezcementowe (cementless, porouscoated, press-fit) i hybrydowe (hybrid, mixed);
- rozległość wycięcia więzadła krzyżowego tylnego (PCL): pozostawienie PCL (cruciate retaining) oraz wycięcie (poświęcenie) PCL (cruciate excising, sacrificing).
Głównymi etapami zabiegu operacyjnego są:
- przygotowanie pola operacyjnego;
- dojście operacyjne;
- tzw. opracowanie tkanek miękkich (błona maziowa, łąkotki, ACL i PCL, uwolnienie troczków) i uzyskanie poprawnego balansu więzadłowego;
- przygotowanie powierzchni udowej i piszczelowej oraz powierzchni rzepki;
- ustalenie rozmiarów protezy i typu CR lub PS;
- wprowadzenie prowizoryczne próbników elementów protezy, ocena ruchów i stabilności stawu;
- zamocowanie elementów protezy (wklejenie);
- hemostaza, szwy warstwowe, drenaż, opatrunek;
- założenie opatrunku lekko uciskowego (opaska elastyczna, pończocha itp.).
Alloplastyka całkowita, jako metoda operacyjnego leczenia zaawansowanych schorzeń stawu kolanowego, spełnia jej podstawowe założenia, przynosząc szerokim rzeszom chorych znaczną poprawę jakości życia. Obecnie całkowita alloplastyka stawu kolanowego jest podstawowym zabiegiem operacyjnym u osób z rozległymi zniekształceniami stawu w przebiegu choroby zwyrodnieniowej czy reumatoidalnego zapalenia stawów i uważana jest w tych przypadkach za metodę z wyboru
65. Powstawaniu przeciążeń sprzyjają najczęściej niekorzystne sytuacje biomechaniczne, związane zwykle z wykonywaniem zawodu, uprawianiem sportu wyczynowego, stanem fizycznym człowieka, wadami wrodzonymi, itp. Kręgosłup poddawany jest różnego rodzaju obciążeniom np. ściskaniu, rozciąganiu, zginaniu lub też skręcaniu. Stabilność wewnętrzną kręgosłupa zapewnia ciśnienie wewnątrz krążków międzykręgowych i więzadła, natomiast stabilność zewnętrzną zapewniają mięśnie i np. ciśnienie w jamach ciała.
Są 2 mechanizmy przeciążenia kręgosłupa:
Mechanizm przeciążenia doraźnego - ma podłoże urazowe, związane z doraźnym przekroczeniem wartości granicznej wytrzymałości struktur kostnych kręgosłupa; np. wypadki lokomocyjne, upadki z wysokości.
Mechanizm przeciążenia zmęczeniowego - w którym działają długotrwałe cykliczne obciążenia naruszające pierwotną stabilność kręgosłupa, prowadzące do uszkodzenia nawet gdy nie przekroczyły one doraźnej wytrzymałości struktur kostnych.
Od strony mechaniki niestabilność struktur kręgosłupa występuje wówczas, gdy małe obciążenie powoduje duży wzrost przemieszczeń. W pojęciu klinicznym mianem niestabilności określa się stan, w którym podczas ruchu lub już pod wpływem samych obciążeń dochodzi do przemieszczeń względem siebie segmentów ruchowych kręgosłupa. W tej sytuacji kręgosłup traci zdolność do zachowania prawidłowych stosunków przestrzennych między poszczególnymi kręgami, a ich częściami, doprowadzając do ciasnoty kanału kręgowego lub otworów międzykręgowych (co powoduje dolegliwości bólowe).
66. Założeniem modelu Stotte`a jest to, że środek ciała pokrywa się ze środkiem ciężkości ciała, który jest podstawą do przyjmowania obciążeń działających na kręgosłup sił i obciążeń w rejonie danego kręgu.
Qt - ciężar głowy i karku oraz tułowia
Pp - siła wywierana przez ciśnienie
śródbrzuszne przyłożone w środku pasma p
Ql - ciężar ramion działających przez staw ramienny,
Px - siła prostowników grzbietu
Pm - składowa siły wzdłużnej mięśni brzucha
Ps, Pc - składowe siły w krążku międzykręgowym (styczna, kompresji)
[wg. Stotte'a]
Pxdx + Ppdp= Qldl - lub + Qtdt+Pmdm
Pc=(Ql+ Qt)cos a + Px - Pp +Pm
Ps=(Ql+ Qt)sin a
10
Wyszukiwarka
Podobne podstrony:
BIOMECHANIKA PYTANIA, Studia, Fizjoterapia, Studia - fizjoterapia, Biomechanika, egzamin kolosy
biomech, Studia, Fizjoterapia, Studia - fizjoterapia, Biomechanika, egzamin kolosy
biomechanika (1), Studia, Fizjoterapia, Studia - fizjoterapia, Biomechanika, egzamin kolosy
Marketing polityczny pytania egzamin 2008, Studia, Psychologia, SWPS, 3 rok, Semestr 05 (zima), Psyc
-egzaminRolna zaoczni2, studia rolnictwo, semestr 4
pp egzamin poprawiany, STUDIA, Podstawy pielęgniarstwa, Egzamin
prawoznawstwo - egzamin, Administracja - studia, I semestr, Podstawy prawoznawstwa
Pytania egzaminacyjne, SGH - studia licencjackie - NOTATKI, Mikroekonomia I (Staniek)
egzamin masaz, STUDIA, WSR - Fizjoterpia, Rok II, ROK II, Semestr III, MASAŻ, MASAŻ
Pytania z egzaminu rachuna, studia, rachunkowość
Pytania na egzamin - BIOLOGIA, Studia, 1-stopień, inżynierka, Ochrona Środowiska
fizyka egzamin odpowiedzi, studia calosc, studia całość, fizyka
EGZAMIN poprawiony, STUDIA, Fizjologia, EGZAMIN
psychologia rozwoju egzamin ściąga, studia, II rok Pedagogiki
Pytania i odpowiedzi na egzamin, Budownictwo - studia, I stopień, I rok, Chemia
sciaga egzamin społeczna, studia, ściągi
więcej podobnych podstron