dr inż. Krzysztof Chodnikiewicz Rok akademicki: 2010 - 2011
Materiały uzupełniające
D1. Definicje wybranych wielkości fizycznych
Położenie - wektorowa wielkość fizyczna określająca kierunek i odległość danego obiektu od wybranego punktu odniesienia, będącego zazwyczaj początkiem układu współrzędnych. Wektor, który jest utożsamiany z położeniem, nosi nazwę wektora wodzącego. Należy rozróżniać położenie w ruchu prostoliniowym i obrotowym.
Przemieszczenie - różnica pomiędzy dwoma położeniami.
Masa - wielkość fizyczna określająca bezwładność ciał (masa bezwładna) i oddziaływania grawitacyjne między nimi (masa grawitacyjna).
Czas - w fizyce klasycznej samodzielna wielkość, niezależna od innych wielkości, biegnąca w takim samym rytmie w całym Wszechświecie. W mechanice relatywistycznej czas stanowi czwartą współrzędną czasoprzestrzeni, jego upływ zaś zależy od obserwatora i jest różny dla różnych obserwatorów.
Prędkość - wektorowa wielkość fizyczna wyrażająca zmianę wektora położenia w jednostce czasu. Prędkość liniowa dotyczy zmiany położenia w ruchu prostoliniowym. Prędkość kątowa dotyczy zmiany położenia w ruchu obrotowym.
Przyspieszenie - wektorowa wielkość fizyczna, której wartość jest równa wartości pochodnej prędkości względem czasu w danej chwili. Jeśli przyspieszenie jest skierowane przeciwnie do kierunku prędkości ruchu, to jest czasem nazywane opóźnieniem. Tak jak w przypadku prędkości wyróżnia się przyspieszenie liniowe i przyspieszenie kątowe.
Pęd punktu materialnego - iloczyn masy i prędkości punktu. Pęd jest wielkością wektorową; kierunek i zwrot pędu jest zgodny z kierunkiem i zwrotem prędkości. Pęd układu punktów materialnych jest równy sumie wektorowej pędów, wszystkich punktów układu.
Siła - wielkość wektorowa, miara oddziaływań fizycznych między ciałami. Szczególnym przypadkiem siły jest ciężar.
Moment siły (moment obrotowy) - iloczyn wektorowy siły i promienia wodzącego, którego początek znajduje się w określonym punkcie a koniec w punkcie przyłożenia siły.
Sprawność - miara jakości przekształcania energii, najczęściej wyrażana w procentach. Jeżeli - przykładowo - sprawność wynosi 80%, to znaczy, ze 80% energii wejściowej zostało przekształcone w energię wyjściową, a 20% zostało w procesie przekształcania stracone.
Wielkość fizyczna
|
Jednostka |
Uwagi: |
Najczęściej stosowany symbol: |
Odległość, długość, położenie, przemieszczenie liniowe |
metr [m] |
Jednostki podstawowe układu SI |
x |
Kąt płaski |
radian [rad] |
|
α |
Masa |
kilogram [kg] |
|
m |
Czas |
sekunda [s] |
|
t |
Prędkość liniowa |
m/s |
|
v |
Prędkość kątowa |
rad/s |
|
ω |
Przyspieszenie liniowe |
m/s2 |
|
a |
Przyspieszenie kątowe |
rad/s2 |
|
ε |
Moment bezwładności |
kgm2 |
|
J |
Pęd |
kg m/s |
|
p |
Siła |
(Newton) N=kgm/s2 |
Patrz 1) |
F |
Moment obrotowy |
Nm |
|
M |
Praca |
(dżul) J = Nm |
|
W |
Moc |
(Wat) W = J/s |
Patrz 2) |
P |
1) W stosowanym szereg lat temu układzie CGS (centymetr, gram, sekunda) jednostką siły była dyna. W Polsce stosowano także jednostkę o nazwie kilogram siły [kG]; w Niemczech - równy mu kilopond [kp]. Jeden kilogram siły jest to siła z jaką Ziemia przyciąga ciało o masie 1 kg. Jednostkę tę można jeszcze spotkać w starych podręcznikach; 1 kG to około 9,80665 N. W Wielkiej Brytanii zamiast oznaczenia kG lub kp używano kgf (kilogram force).
2) 1kW (kilowat), równy 1000W, po wprowadzeniu układu SI, zastąpił konia mechanicznego (KM). Moc silników, szczególnie spalinowych jest często nadal podawana w KM, przy czym 1 KM = 0,735498 kW zaś 1 kW = 1,3596 KM
D2. Wzory określające wybrane wielkości fizyczne
Wielkość fizyczna, symbol |
Wzór |
Użyte symbole |
Uwagi; |
Prędkość liniowa, v |
|
s- droga, t - czas; |
Wzór słuszny dla ruchu jednostajnego lub dla prędkości średniej |
|
|
x - przemieszczenie liniowe |
Wzór ogólny |
Prędkość kątowa, |
|
|
Wzór słuszny dla ruchu jednostajnego lub dla prędkości średniej |
|
|
|
Wzór ogólny |
Przyspieszenie liniowe, a |
|
|
Wzór słuszny dla ruchu jednostajnie przyspieszonego |
|
|
|
Wzór ogólny |
Przyspieszenie kątowe, |
|
|
Wzór słuszny dla ruchu jednostajnie przyspieszonego |
|
|
|
Wzór ogólny |
Pęd punktu materialnego, p |
|
m- masa |
|
Siła, F |
|
|
|
Moment siły, M |
|
r - promień wodzący |
|
|
|
J - moment bezwładności |
|
Praca, W |
|
|
Wzór dotyczy ruchu prostoliniowego, słuszny dla F = const |
|
|
|
Wzór ogólny, dotyczy ruchu prostoliniowego |
|
|
|
Wzór dotyczy ruchu obrotowego, słuszny dla M = const |
|
|
|
Wzór ogólny, dotyczy ruchu obrotowego |
Moc, P |
|
|
Wzór określający moc średnią w czasie t |
|
|
|
Wzór ogólny |
|
|
|
Wzór dotyczy ruchu prostoliniowego |
|
|
|
Wzór dotyczy ruchu obrotowego |
Zadania
1. Uzupełnić poniższą tablicę umieszczając w jej kolumnach wielkości analogiczne:
Ruch prostoliniowy |
Ruch obrotowy |
Przemieszczenie |
Kąt obrotu |
….. |
….. |
….. |
….. |
2. Zakładając, że moc wyjściowa silnika jest stała i wynosi 5kW obliczyć pracę, którą ten silnik wykonuje w ciągu 1 godziny.
3. Załóżmy, że praca obliczona w powyższym zadaniu byłaby zużyta na podniesienie do góry samochodu o masie 1070kg. Na jaką wysokość byłby podniesiony ten samochód?
4. Na tablicy znamionowej starego silnika elektrycznego można odczytać, że moc wynosi 6HP. Ile to kilowatów?
D3. Definicje jednostek podstawowych układu SI
Kilogram - jednostka masy, jednostka podstawowa układu SI, oznaczana kg. Jest to masa międzynarodowego wzorca (walca o wysokości i średnicy podstawy 39 mm wykonanego ze stopu platyny z irydem) przechowywanego w Międzynarodowym Biurze Miar w Sèvres koło Paryża. Wzorzec kilograma został usankcjonowany uchwałą I Generalnej Konferencji Miar w 1889. Jest to obecnie jedyna jednostka podstawowa posiadająca przedrostek (kilo), jak również jedyna, dla której podstawą definicji jest określony przedmiot, a nie odwołanie się do stałych fizycznych. Dawniej za wzorzec był przyjmowany jeden litr wody o temperaturze czterech stopni Celsjusza przy ciśnieniu normalnym. W 1901 r. z kolei 3. Konfrencja CGPM zmieniła definicję litra na objętość jaką zajmuje 1 kg wody destylowaniej w temperaturze 3,98 °C przy ciśnieniu 1 atm = 760 mm Hg (1013,25 hPa). Zależności między litrem i kilogramem usunięto w 1964 r., na 12. konferencji CGPM.
Metr to jednostka podstawowa długości w układach: SI, MKS, MKSA, MTS, oznaczenie m. W myśl definicji zatwierdzonej przez Generalną Konferencję Miar i Wag w 1983 jest to odległość, jaką pokonuje światło w próżni w czasie 1/299 792 458 s.
Sekunda (łac. secunda - następna, najbliższa) - jednostka czasu, jednostka podstawowa większości układów jednostek miar np. SI, MKS, CGS - oznaczana s. Termin sekunda pochodzi od łacińskiego wyrażenia pars minuta secunda (druga mała część). Jest to czas równy 9 192 631 770 okresów promieniowania odpowiadającego przejściu między dwoma poziomami F = 3 i F = 4 struktury nadsubtelnej stanu podstawowego 2S1/2 atomu cezu 133Cs (powyższa definicja odnosi się do atomu cezu w spoczynku, w temperaturze 0 K). Definicja ta, obowiązująca od 1967 r., została ustalona przez Międzynarodowy Układ Jednostek Miar. Poprzednio sekundę definiowano jako 1/31 556 925,9747 część roku zwrotnikowego 1900 lub 1/86400 część doby.
Stopień - jednostka miary kąta płaskiego równa 1/360 kąta pełnego, czyli 60 minut, czyli 3600 sekund czyli 216000 tercji, nie należąca do układu SI - oznaczenie 1°.
Jest to kąt płaski równy kątowi między dwoma promieniami koła, wycinającymi z okręgu tego koła łuk o długości równej promieniowi. 1° = (π/180) rad = 60′
Amper - prąd o natężeniu 1 A jest to stały prąd elektryczny, który płynąc w dwóch równoległych, prostoliniowych, nieskończenie długich przewodach o znikomo małym przekroju kołowym, umieszczonych w próżni w odległości 1 m od siebie, spowodowałby wzajemne oddziaływanie przewodów na siebie z siłą równą 2*10 -7 N na każdy metr długości przewodu.
D4. Sprawność układu napędowego
Sprawność nie jest pojęciem jednoznacznym. Pozostając przy znaczeniu ściśle technicznym, należy rozróżnić sprawność chwilową i sprawność średnią, wyznaczoną w określonym czasie. Można je zdefiniować następująco:
- sprawność chwilowa
η = Moc uzyskana (wyjściowa) / Moc włożona (wejściowa)
- sprawność średnia (w określonym okresie czasu)
η = Praca uzyskana (wyjściowa) / Praca włożona (wejściowa).
Zastosowanie w definicjach dwóch różnych wielkości fizycznych wynika stąd, że moc może być określona dla danej chwili, natomiast praca zawsze dotyczy określonego czasu. Niekiedy mogą powstać nieporozumienia dotyczące wejścia i wyjścia danego układu lub urządzenia. Dlatego, w każdym przypadku, powinny być one precyzyjnie określone.
Elementy układu, dla którego określa się sprawność, mogą być połączone szeregowo lub równolegle .
W przypadku połączenia szeregowego (rys.2.6) sprawność całego układu wynosi

W przypadku połączenia równoległego wzór jest bardziej skomplikowany i najprościej będzie rozpatrzyć konkretny przykład. Niech to będzie układ składający się z dwóch pomp, P1 i P2, napędzanych jednym silnikiem S jak na rys.2.7.
.
Moc wyjściowa pompy jest równa iloczynowi ![]()
gdzie Q jest wydajnością zaś p ciśnieniem wyjściowym pompy. Moc wyjściowa układu pomp połączonych równolegle wynosi
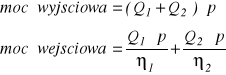
Sprawność układu pomp połączonych równolegle jest więc równa

Przykład
Pompy P1i P2 mają jednakowe wydajność 50 litrów na minutę każda. Sprawności się różnią: η1 = 60%, η2 = 85%. Obliczyć sprawność układu tych pomp połączonych szeregowo (a) i połączonych równolegle (b).
(a) ![]()
0,51 (51%)
(b) 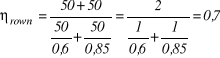
(70%)
Zadanie: Wytłumaczyć, nie odwołując się do wzorów, dlaczego w powyższym zadaniu wystąpiła tak znaczna różnica pomiędzy wynikami (a) i (b).
Zadanie
Dwie pompy hydrauliczne tworzą zespół. Są one połączone równolegle. Wydajność pierwszej wynosi 100 l/min, jej sprawność - 55%. Wydajność drugiej 200 l/min, sprawność - 68%. Obliczyć wydajność i sprawność zespołu.
D5. Sprawność typowych urządzeń technicznych według : D.R. Wulfinghoff, „Energy Efficiency Manual”, 1999.
Energy Conversion Device |
Energy Conversion |
Typical Efficiency, % |
Electric heater |
Electricity/Thermal |
100 |
Hair drier |
Electricity/Thermal |
100 |
Electric generator |
Mechanical/Electricity |
95 |
Electric motor (large) |
Electricity/Mechanical |
90 |
Battery |
Chemical/Electricity |
90 |
Steam boiler (power plant) |
Chemical/Thermal |
85 |
Home gas furnace |
Chemical/Thermal |
85 |
Home oil furnace |
Chemical/Thermal |
65 |
Chemical/Thermal |
Electricity/Mechanical |
65 |
Home coal furnace |
Chemical/Thermal |
55 |
Steam turbine |
Thermal/Mechanical |
45 |
Gas turbine (aircraft) |
Chemical/Mechanical |
35 |
Gas turbine (industrial) |
Chemical/Mechanical |
30 |
Automobile engine |
Chemical/Mechanical |
25 |
Fluorescent lamp |
Electricity/Light |
20 |
Silicon solar cell |
Solar/Electricity |
15 |
Steam locomotive |
Chemical/Mechanical |
10 |
Incandescent lamp |
Electricity/Light |
5 |
D6. Frezarka FWA-32M
Frezarki FWA-32A były produkowane w latach siedemdziesiątych XX wieku. W wielu przedsiębiorstwach są one nadal z pożytkiem używane. Warto porównać schemat kinematyczny tej tokarki (patrz niżej) z rys.1.11, punkt 1.5 wykładu, na którym przedstawiono szkic frezarki CNC.
D7. Model
W naukach technicznych, ale nie tylko, bardzo często używane jest „model”. Na poniższym rysunku pokazano klasyfikacje modeli. W naukach technicznych rozpatruje się najczęściej modele symboliczne, w szczególności matematyczne.
W książce p.t. “Computer simulation and modeling” jej autor F.Neelamkavil podaje następującą definicję modelu: „A model is a simplified representation of a system (or process, or theory) intended enhance our ability to understand, predict, and possibly control the behavior of the system”.
Należy z naciskiem podkreślić, ze „najlepszy” model nie istnieje. Model powinien być tak prosty jak to tylko możliwe, a jednocześnie wystarczający do opisania zjawisk, które dzięki modelowi mają być zrozumiane lub przewidziane. Jest to wskazówka bardzo ogólna, ale trudno podać lepszą. Ogólność powyższej wskazówki jest powodem, że w budowie modeli, szczególnie matematycznych, ogromna rolę gra doświadczenie. Należy podkreślić, że do budowy prostych modeli „zmusza” bardzo często niepełna znajomość wartości liczbowych wielkości występujących w modelu. Istotnie! Stosunkowo łatwo można zmierzyć masę, trudniej moment bezwładności i sprężystość, a jeszcze trudniej cechy tłumiące układu. Podobnie, trudno jest określić niektóre wartości liczbowe charakteryzujące silniki elektryczne.
D8. Zarys numerycznych metod rozwiązywania równań różniczkowych zwyczajnych
Jeżeli na podstawie Drugiej Zasady Dynamiki Newtona (1643-1727) obliczy się przyspieszenie, to wyznaczenie prędkości, a następnie przemieszczenia wymaga rozwiązania równań różniczkowych. Trudności ze ścisłym rozwiązaniem równań spowodowały poszukiwanie rozwiązań przybliżonych. Większość takich rozwiązań opracowano wiele lat temu, jednak ich zastosowanie było ograniczone, gdyż metody rozwiązywania równań różniczkowych wymagają wielkiej liczby operacji arytmetycznych, co przed wprowadzeniem do nauki i techniki komputerów (dawniej mówiono o maszynach matematycznych) było niezwykle utrudnione, jeżeli w ogóle możliwe. Nadto, rozwiązywanie „na piechotę” było ze względu na możliwość popełnienia błędu ogromnie ryzykowne. W metodach przybliżonych, powszechnie nazywanych numerycznymi, wykonuje się operacje na liczbach, a nie na symbolach. Jest to niedogodność, gdyż rozpatrywane jest konkretne równanie, a nie typ równania.
Nazwa najprostszej metody wywodzi się od Eulera (1707-1783). Współcześnie powszechnie jest stosowane są metody Rungego-Kutty. C.D.T.Runge żył w latach 1856-1927; M.W.Kutta - w latach 1867 - 1944. Lata te podano w celu udokumentowania twierdzenia, że metody numeryczne powstały znacznie wcześniej niż zbudowano pierwszy komputer („Collosus”, 1943). Obecnie komputery i kalkulatory programowalne „same” rozwiązują skomplikowane układy równań różniczkowych, a użytkownik na ogół nie ma pojęcia jak to się dzieje. Warto jednak takie pojęcie mieć i celowi temu służą poniższe informacje.
Rozwiązywanie równań różniczkowych zwyczajnych przy znanych warunkach początkowych matematycy nazywają „rozwiązywaniem zagadnień początkowych równań różniczkowych zwyczajnych”.
Zauważmy, że wystarczy podać metodę rozwiązania dla równania pierwszego rzędu, gdyż równanie drugiego rzędu
![]()
,
może być, dzięki podstawieniu, sprowadzone do poniższego układu równań pierwszego rzędu
![]()
W powyższym zapisie operator ![]()
zastąpiono symbolem „bis”, zaś operator ![]()
- symbolem „prim”. Rozpatrzmy więc równanie pierwszego rzędu, które ma postać
![]()
.
Zakładamy, że równanie to obowiązuje w przedziale ![]()
i że znany jest warunek początkowy: ![]()
. Metodę Eulera określa wzór, który wynika z definicji pochodnej
![]()
Dolny indeks n oznacza poprzedni krok całkowania, dolny indeks n+1 - krok następny, zaś h jest długością kroku całkowania (rys.4.6).
Łatwo zauważyć, że dokładność (inaczej: błąd) metody zależy od wartości kroku. Dla metody Eulera znane jest oszacowanie błędu; istnieje także dowód zbieżności metody (patrz np. Andrzej Krupowicz: Metody numeryczne zagadnień początkowych równań różniczkowych zwyczajnych. PWN, Warszawa, 1980). Zbieżność oznacza, że zmniejszanie kroku powoduje zmniejszanie się błędu.
Wykonajmy jeden krok metody Eulera rozwiązując równanie
![]()
uwzględniając, że dla t = 0 jest y = 0. Wyznaczmy człony wyrażenia określającego rozwiązanie przyjmując, że n = 0. Otrzymuje się
![]()
![]()
Załóżmy, że h = 0,1. Otrzymujemy
![]()
Porównajmy uzyskane rozwiązanie z rozwiązaniem ścisłym, które dla rozwiązywanego równania i danego warunku początkowego ma postać
![]()
Podstawiając t = h = 0,1 otrzymuje się
![]()
czyli już w pierwszym kroku popełnia się błąd rzędu 10%. Można byłoby ten błąd zmniejszyć zmniejszając krok.
Metody (proszę zauważyć liczbę mnogą) Rungego-Kutty zapisujemy w postaci
![]()
n = 0, 1, 2, …
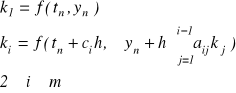
gdzie ![]()
zaś wi, ci, aij są znanymi liczbami. Dla jednej z metod, która jest stosowana w praktyce i jest po prostu nazywana metodą Rungego-Kutty, obowiązują wzory
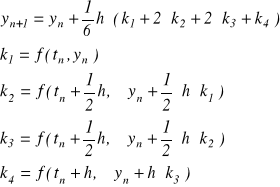
Powróćmy do równania ![]()
i wykonajmy jeden krok obliczeniowy stosując powyższe wzory i zakładając h = 0,1
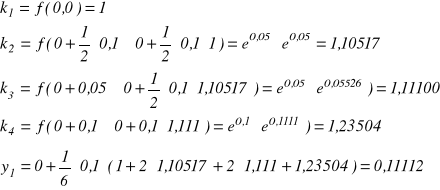
Porównując otrzymany wynik z wynikiem uzyskanym na podstawie rozwiązania ścisłego stwierdzamy, że z dokładnością do piątego miejsca po przecinku (taka dokładność była ustawiona na kalkulatorze), wyniki są identyczne.
Zadanie
Powyżej wykonano pierwszy krok obliczeniowy metoda Eulera i Rungego-Kutty dla równania ![]()
przy założeniu kroku h = 0,1. Powtórzyć te obliczenia, przyjmując dla metody Eulera h = 0,05, a dla metody Rungego-Kutty h = 0,2. Wyciągnąć wnioski.
D9. Kilka informacji dotyczących historii silników elektrycznych
W 1832 r. Anglik William Sturgeon wynalazł komutator, co umożliwiło budowę silnika prądu stałego, którego wał obracał się (rys.). Silnik Sturgeon'a zawierał w sobie wszystkie podstawowe części współczesnych silników. Najmniejsze silniki prądu stałego mają moc ułamkową, największe - ponad 1MW. Silnik prądu przemiennego został wynaleziony przez przypadek w 1868r. Belg, Zenobie Gramme połączył ze sobą dwie wynalezione przez siebie prądnice; druga zaczęła pracować
jako silnik. W 1888 r. Nikola Tesla zbudował pierwszy silnik prądu przemiennego, który został zastosowany praktycznie. Pierwsze silniki prądu przemiennego wyprodukowała istniejąca do dnia dzisiejszego amerykańska firma Westinghouse. Współczesne silniki prądu przemiennego maja moc od kilkuset W do kilkuset kW. Ocenia się, że około 80% eksploatowanych na świecie silników to silniki prądu przemiennego.
1
P2
p
Rys.D4.1.6
Pwyj
P23
2
N
..…
1
Pwe
P12
PN-1 N
η1
Fizyczny
Model
h
Wygląd zewnętrzny
Rys.D4.2
Pompa P1: wydajność Q1, sprawność η1
Pompa P2: wydajność Q2, sprawność η2
S
P1
η2
ηN
Symboliczny
Mentalny
Składa się z elementów, które można dotknąć.
Zależności matematyczne, symboliczne lub logiczne, mapy, wykresy, rysunki, itp.
Istnieje tylko w umyśle; niemożliwy do przekazania.
Matematyczny
Równania algebraiczne
Równania różniczkowe
Niematematyczny
Statyczny
Dynamiczny
Rys.5.1. Model silnika Williama Sturgeon'a.
Rys.4.6
yn+1
tn+1
tn
t
y
yn
Wyszukiwarka
Podobne podstrony:
Wykład 2009 2010 dynamika, Automatyka i Robotyka, SEMESTR 5, NEMAR, Nemar stary, nemar, nemar DUŻO,
TEST ROZWIAZANY 2011, Automatyka i Robotyka, SEMESTR 5, NEMAR, Nemar stary, nemar, nemar DUŻO, teori
Wykład 2010 2011 dynamika, Automatyka i Robotyka, SEMESTR 5, NEMAR, Nemar stary, nemar, nemar DUŻO,
ZADANIA WERSJA POPRAWIONA, Automatyka i Robotyka, SEMESTR 5, NEMAR, Nemar stary, nemar, nemar DUŻO,
Zadania Dodatkowe(1), Automatyka i Robotyka, SEMESTR 5, NEMAR, Nemar stary, nemar, nemar DUŻO, zadan
Namar laboratoria2014 15 po korekcie-1 LM, Automatyka i Robotyka, SEMESTR 5, NEMAR, Laboratorium
Zadania dodatkowe, Automatyka i Robotyka, SEMESTR 5, NEMAR, Nemar stary, nemar, nemar DUŻO, zadania
CLAB 1 2010-2011, Automatyka i Robotyka, Język programowania
Zestaw C++-zaliczenie wcześniejsze 2010-2011, Automatyka i Robotyka, Język programowania
CLAB 12 2010-2011, Automatyka i Robotyka, Język programowania
CLAB 10 2010-2011, Automatyka i Robotyka, Język programowania
CLAB 5 2010-2011, Automatyka i Robotyka, Język programowania
CLAB 11 2010-2011, Automatyka i Robotyka, Język programowania
więcej podobnych podstron