[26] Kąty Eulera i macierz obrotu
Euler zauważył, że dowolne położenie czworościanu w przestrzeni może być reprezentowane poprzez trzy kąty, tj. obroty czworościanu nieruchomego względem pewnych osi i przy pomocy tylko trzech kątów obrotu w pewnych płaszczyznach doprowadzą do pokrycia się ostrosłupa nieruchomego z ruchomym.
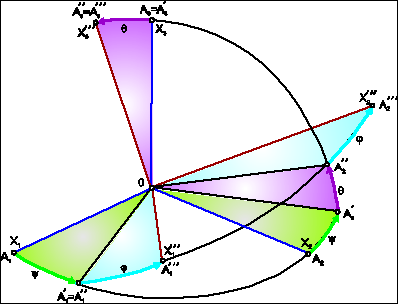
Rys. 6.5. Kąty Eulera
Kąty Eulera przedstawiono na rys. 6.5 (patrz [V. E. Zhuravlev, „Osnowy Tieoreticheskoy Mechaniki”. Fizmatlit, Moskva 2001])
Czworościan 0A1A2A3 po złożeniu trzech płaskich obrotów kolejno o kąty ψ, θ i ϕ znajduje się w położeniu ![]()
. Pierwszy obrót o kąt ψ (kąt precesji) odbywa się w płaszczyźnie 0A1A2 wokół osi 0A3. Drugi obrót o kąt θ (kąt nutacji) zachodzi w płaszczyźnie ![]()
wokół osi ![]()
. Na koniec dokonujemy obrotu o kąt ϕ (kąt obrotu właściwego) w płaszczyźnie ![]()
wokół osi ![]()
. Kolejność obrotów czworościanu można schematycznie przedstawić w następujący sposób:
![]()
(6.49)
Po zrzutowaniu wersorów kolejnych układów współrzędnych na osie układów przed kolejnym obrotem otrzymujemy:
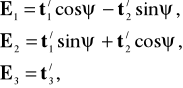
(6.50)
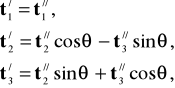
(6.51)
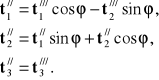
(6.52)
Działania opisane wzorami (6.50) - (6.52) można przedstawić w postaci:
(6.59)
gdzie:
![]()
(6.60)
jest tensorem obrotu będącym wynikiem działania trzech tensorów obrotu Ψ, Θ, φ.
Wyszukiwarka
Podobne podstrony:
4644
4644
4644
4644
4644
030923100537id 4644 Nieznany (2)
4644
4644
a lot of various circuits index 4428613 25 4644
więcej podobnych podstron