Politechnika Białostocka
Wydział Mechaniczny
Kinga Rycewicz Edukacja techniczno - informatyczna Semestr V Grupa 4
|
Programowanie systemów sterowania. |
Data: 2.11.2011
Ocena: |
Ćw nr 4
|
Temat: Programowanie prostych sterowań. Układy szeregowego i równoległego łączenia styków. Programowanie sterowań z instrukcją pamiętania stanów SET i RESET. |
Prowadzący: mgr inż. Mirosław Kondratiuk |
Cel ćwiczenia:
Celem ćwiczenia jest zapoznanie się ze sposobem programowania układów szeregowego i równoległego łączenia styków.
Zakres ćwiczenia:
- przeanalizowanie przykładowych zadań z określonymi układami sterowania;
- zapoznanie się z działaniem przekaźnika set i reset;
- zapoznanie się z działaniem przekaźników aktywowanych zboczem rosnącym i malejącym;
- wykonywanie zadania z wykorzystaniem różnych przekaźników;
- wykonanie zadań;
- rozwiązanie zadań sprawdzających;
- sprawdzenie przez prowadzącego działania poszczególnych układów;
- wykonanie sprawozdania z ćwiczenia.
Zadania do zrealizowania:
Zadanie 1
Adres |
Nazwa |
Opis |
%i1 |
P1 |
Przycisk 1 |
%i2 |
P2 |
Przycisk 2 |
%q1 |
L1 |
Lampka 1 |
Lampka zostanie włączona po wciśnięciu przycisków P1 i P2. 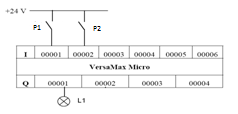

Po naciśnięciu przycisków P1 i P2 sterownik wysyła sygnał, który powoduje zapalenie się lampki L1.
Zadanie 2
Drzwi garażu można otworzyć po wciśnięciu jednego z czterech przycisków. Otwarcie drzwi sygnalizowane jest zapaleniem żarówki Z1.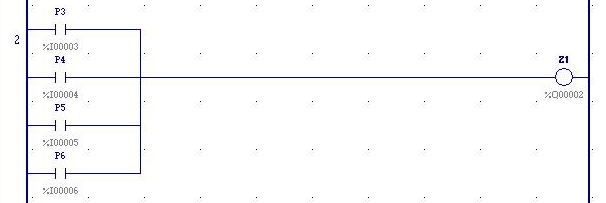
Adres |
Nazwa |
Opis |
%i3 |
P3 |
Przycisk 3 |
%i4 |
P4 |
Przycisk 4 |
%i5 |
P5 |
Przycisk 5 |
%i6 |
P6 |
Przycisk 6 |
%q2 |
Z1 |
Żarówka Z1 |
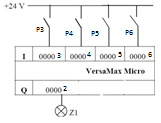
Po wciśnięciu jednego z czterech przycisków (A,B,C,D) sterownik wysyła sygnał, który powoduje zapalenie się żarówki Z1.
Zadanie 3
Napisz program do przełączania kierunku wirowania osi silnika. Przyciski niestabilne P_PRAWO i P_LEWO służą di wyboru kierunku wirowania osi silnika, czyli włączania wyjść S_PRAWO i S_LEWO. Przycisk rozwierny STOP zatrzymuje ruch silnika.
Adres |
Nazwa |
Opis |
%i1 |
PP |
P_PRAWO |
%i2 |
PL |
P_LEWO |
%i3 |
STOP |
STOP |
%q1 |
SP |
S_PRAWO |
%q2 |
SL |
S_LEWO |

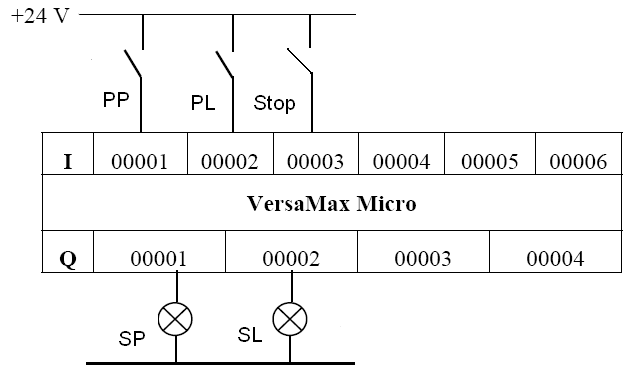
Przy wciśniętym przycisku PP i wyłączonym SL silnik wiruje w prawo, zaś przy wciśniętym PL a wyłączonym SP wiruje w lewo. Aby zmienić kierunek obrotu musimy użyć przycisku STOP.
Zadanie 4
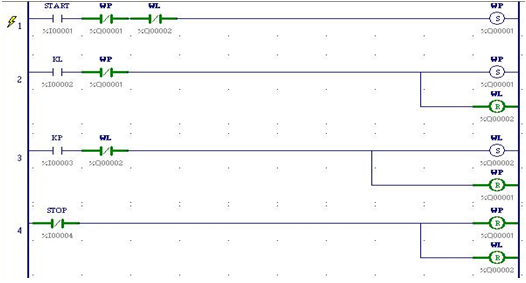
Zaprojektować układ automatycznego sterowania ruchem wózka. Wózek porusza się w prawo i lewo między czujnikami końca KR_P i KR_L. Ruchem wózka sterują dwa wyjścia o nazwach W_PRAWO, W_LEWO. Czujniki końca KR_P i KR_L przełączają kierunek ruchu wózka aż do momentu, gdy zadziała rozwierny przycisk STOP powodujący wyłączenie obu wyjść W_PRAWO i W_LEWO. Po naciśnięciu niestabilnego przycisku STOP czujniki końca nie powinny załączać żadnego z wyjść . zakładamy, że niestabilny przycisk START zawsze zapoczątkowuje ruch wózka w prawo. 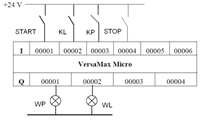
Adres |
Nazwa |
Opis |
%i1 |
START |
START |
%i2 |
KL |
krancówka KR_L |
%i3 |
KP |
krancówka KR_P |
%i4 |
STOP |
STOP |
%q1 |
WP |
W_PRAWO |
%q2 |
WL |
W_LEWO |
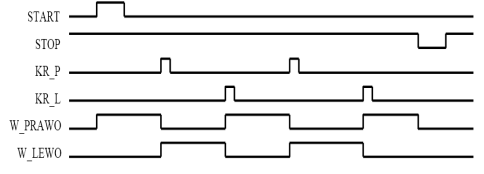
Po włączeniu przycisku START wózek porusza się w prawo. Uruchomienie prawej krańcówki powoduje ruch wózka w lewo i odwrotnie. Po naciśnięciu przycisku STOP czujniki nie załączają żadnego z wyjść.
Wnioski:
Zapoznaliśmy się ze sposobem programowania układów szeregowego i równoległego łączenia styków. Zadania były nieznacznie trudniejsze od poprzednich realizowanych na wcześniejszych zajęciach. Zapoznaliśmy się z działaniem przekaźnika set i reset.
Wyszukiwarka
Podobne podstrony:
6814
6814
praca magisterska 6814
6814
6814
6814
6814
6814
6814
6814 motyw wędrówki w literaturze omów zagadnienie na wybranym przykładzie
więcej podobnych podstron