SOLAS
Zgodnie z wymaganiami konwencji SOLAS, jeden radar powinien być zainstalowany na zbudowanych w 2006 roku statkach towarowych uprawiających żeglugę międzynarodową o pojemności brutto nie mniejszej niż:
a) 150; b) 300; c) 500; d) 1600.
Zgodnie z wymaganiami konwencji SOLAS, w dwa radary pracujące niezależnie jeden od drugiego, powinny być wyposażone statki zbudowane po 1 lipca 2002 roku o pojemności brutto nie mniejszej niż:
1600; b) 3000; c) 5000 d) 10000.
Zgodnie z wymaganiami konwencji SOLAS, w dwa radary pracujące niezależnie jeden od drugiego, powinny być wyposażone statki zbudowane przed 1 lipca 2002 roku o pojemności brutto nie mniejszej niż:
a) 1600; b) 3000; c) 10000.
Według wymagań konwencji SOLAS, ARPA powinna być instalowana na statkach o pojemności brutto nie mniejszej niż:
a) 1600; b) b) 3000; c) 10000;
Czy zgodnie z wymaganiami konwencji SOLAS, statek pasażerski o pojemności brutto 7000 zbudowany w 2008 roku powinien być wyposażony w ARPA?
tak; b) nie.
Czy zgodnie z wymaganiami konwencji SOLAS, ARPA zainstalowana na statku o pojemności brutto 157000 zbudowanym przed 1 lipca 2002 powinna być podłączona do logu?
tak; b) nie.
Czy zgodnie z wymaganiami konwencji SOLAS, ARPA zainstalowana na statku o pojemności brutto 10000 zbudowanym po 1 lipca 2002 powinna być podłączona do logu mierzącego prędkość po wodzie?
tak; b) nie.
Czy zgodnie z wymaganiami konwencji SOLAS, ARPA zainstalowana na statku o pojemności brutto 10000 zbudowanym po 1 lipca 2002 powinna być podłączona do logu mierzącego prędkość nad dnem?
tak; b) nie.
Zgodnie z wymaganiami Konwencji SOLAS, statek o pojemności brutto 3750 zbudowany 01.04.2004 roku powinien być wyposażony w ARPA:
tak; b) nie.
Zgodnie z wymaganiami Konwencji SOLAS, na statku o pojemności brutto 12500 zbudowanym 01.02.2004 roku źródłem informacji o prędkości statku powinien być podłączony do ARPA odbiornik GPS:
tak; b) nie.
Zgodnie z wymaganiami Konwencji SOLAS, statek pasażerski o pojemności brutto 9750 zbudowany 01.04.2004 roku powinien być wyposażony w ARPA:
tak; b) nie.
Zgodnie z wymaganiami Konwencji SOLAS, na statku o pojemności brutto 12500 zbudo-wanym 01.02.1999 roku ARPA powinna być podłączona do logu mierzącego prędkość po wodzie:
tak; b) nie.
Zgodnie z wymaganiami konwencji SOLAS, jeden transponder SART powinien być instalowany na statkach towarowych o pojemności brutto nie mniejszej niż:
150; b) 300; c) 500; d) 1600.
Zgodnie z wymaganiami konwencji SOLAS, dwa transpondery SART powinny być instalowane na statkach pasażerskich o pojemności brutto nie mniejszej niż:
300; b) 500; c) 1600; d) każdym, niezależnie od jego pojemności.
SYMBOLE
Symbol ![]()
oznacza:
załączenie radaru w pozycję praca; b) przełącznik zakresów;
monitor mocy; d) rezonator echa; e) inną funkcję.
Symbol ![]()
oznacza:
załączenie radaru w pozycję praca; b) przełącznik zakresów;
monitor mocy; d) rezonator echa; e) inną funkcję.
Symbol ![]()
oznacza:
załączenie radaru w pozycję praca; b) przełącznik zakresów;
monitor mocy; d) rezonator echa; e) inną funkcję.
Symbol ![]()
oznacza:
załączenie radaru w pozycję praca; b) przełącznik zakresów;
monitor mocy; d) rezonator echa; e) inną funkcję..
Symbol ![]()
oznacza:
zorientowanie względem północy; b) zobrazowanie ruchu rzeczywistego;
przełącznik zakresów; d) EBL;
VRM; f) inną funkcję.
Symbol ![]()
oznacza:
zorientowanie względem północy; b) zobrazowanie ruchu rzeczywistego;
przełącznik zakresów; d) EBL;
VRM; f) inną funkcję.
Symbol ![]()
oznacza:
zorientowanie względem północy; b) zobrazowanie ruchu rzeczywistego;
przełącznik zakresów; d) EBL;
VRM; f) inną funkcję.
Symbol ![]()
oznacza:
zorientowanie względem północy; b) zobrazowanie ruchu rzeczywistego;
przełącznik zakresów; d) EBL;
VRM; f) inną funkcję.
Symbol ![]()
oznacza:
zorientowanie względem północy; b) zobrazowanie ruchu rzeczywistego;
przełącznik zakresów; d) EBL;
VRM; f) inną funkcję.
RÓWNANIA ZASIĘGU, PROPAGACJA
Odstęp czasowy pomiędzy momentami wysłania impulsu sondującego i powrotu echa od obiektu znajdującego się w odległości 24 Mm wynosi około:
100 mikrosekund; b) 200 mikrosekund;
300 mikrosekund; d) 400 mikrosekund.
Czas trwania impulsu podstawy czasu na zakresie 12 Mm jest równy około:
a) 123,6 mikrosekundy; b) 148,3 mikrosekundy;
c) 186,0 mikrosekundy; d) 328,6 mikrosekundy.
Dla danej odległości od anteny radarowej propagacja fal radarowych jest tym bardziej zbliżona do wolno przestrzennej, im obiekt wykrywany radarem jest:
niższy; b) wyższy;
rodzaj propagacji nie zależy od wysokości wykrywanego obiektu.
Dla danego stanu morza i wysokości obiektu, propagacja fali elektromagnetycznej jest tym bardziej zbliżona do wolno przestrzennej, im mniejsza jest odległość od obiektu:
a) tak; b) nie.
Przy danej wysokości anteny, propagacja fal radarowych jest tym bardziej zbliżona do wolno przestrzennej, im stan morza jest:
wyższy; b) niższy;
stan morza nie wpływa na rodzaj propagacji fal radarowych.
Przy danym stanie morza i odległości do obiektu, propagacja fal radarowych jest tym bardziej zbliżona do wolno przestrzennej, im wysokość instalacji anteny jest:
większa; b) mniejsza
wysokość instalacji anteny nie wpływa na rodzaj propagacji fal radarowych.
Dla danego stanu morza i wysokości obiektu, propagacja fali elektromagnetycznej jest tym bardziej zbliżona do wolno przestrzennej im wyżej jest zainstalowana antena radarowa:
tak; b) nie.
Wraz ze wzrostem odległości od anteny radarowej najwolniej maleje amplituda impulsów odbitych od obiektów:a) punktowych; b) powierzchniowych; c) objętościowych;d) zmiana amplitudy nie zależy od rodzaju obiektu.Prędkość obrotowa anteny radaru wpływa na jego możliwości wykrywcze:a) tak; b) nie.Częstotliwość powtarzania impulsów sondujących jest związana z zakresem pracy radaru:a) tak; b) nie.Częstotliwość powtarzania impulsów sondujących wpływa na możliwości wykrycia echa na ekranie radaru z zobrazowaniem syntetycznym:a) tak; b) nie.Energia impulsów sondujących radaru zależy od czasu trwania impulsów modulatora:a) tak; b) nie.Możliwości wykrycia obiektów o małej wysokości npm zależą od wysokości instalacji anteny radarowej:a) tak; b) nie.Częstotliwość powtarzania impulsów sondujących wpływa na minimalny zasięg radaru:a) tak; b) nie.Minimalna odległość wykrycia ech radarowych zależy od poprawności działania przełącznika N/O:a) tak; b) nie.Wraz ze wzrostem zysku energetycznego anteny, zasięg radaru:a) maleje; b) wzrasta;c) zasięg radaru nie zależy od zysku energetycznego anteny.Zysk energetyczny anteny radarowej zależy od częstotliwości promieniowania:a) tak; b) nie.Zasięg radaru zwiększa się, jeżeli nad ciepłe morze napływa chłodne wilgotne powietrze:a) tak; b) nie.
Zasięg radaru zwiększa się, jeżeli nad chłodne morze napływa ciepłe suche powietrze:a) tak; b) nie.W rejonie występowania gór lodowych należy liczyć się możliwością występowania:a) superrefrakcji; b) subrefrakcji; c) refrakcji normalnej.W warunkach refrakcji normalnej, radar z anteną na wysokości 25m wykrył obiekt z odległości 44 Nm. Jaka jest przybliżona wysokość obiektu?a) 120 m; b) 170 m; c) 225 m; d) 275 m.Odległość ostatniego maksimum współczynnika interferencji promieniowania radarowego od anteny radarowej wyraża się wzorem:a) D=4haho/λ; b) D=4(haho/λ; c) D=λ/4haho; d) D=λ/haho.Pierwiastek siódmego stopnia występuje w równaniu zasięgu radaru:a) dla obiektów typu statki i pławy; b) dla powierzchni morza;c) dla obiektów typu chmury; d) nie występuje w żadnym równaniu zasięgu.Pierwiastek szóstego stopnia występuje w równaniu zasięgu radaru dla:a) dla obiektów typu statki i pławy; b) dla powierzchni morza;c) dla obiektów typu chmury; d) nie występuje w żadnym równaniu zasięgu.Pierwiastek czwartego stopnia występuje w równaniu zasięgu radaru dla:a) dla obiektów typu statki i pławy; b) dla powierzchni morza;c) dla obiektów typu chmury; d) nie występuje w żadnym równaniu zasięgu.Kąt zawarty pomiędzy dolnym listkiem charakterystyki promieniowania radarowego, a powierzchnią wody wyraża się wzorem przybliżonym:a ) λ/4ha ho; b) (λ/4ho; c) λ/4ha; d) 4ha/λ ho; e) ho /4haλ;ZAKŁÓCENIA, ZNIEKSZTAŁCENIA, ECHA FAŁSZYWEPrzy braku martwej fali, amplituda zakłóceń od powierzchni morza jest większa:a) w przybliżeniu na kierunku w którym wieje wiatr;b) w przybliżeniu na kierunku z którego wieje wiatr;c) w przybliżeniu na kierunku prostopadłym do kierunku działania wiatru;d) jest taka sama na wszystkich kierunkach i nie zależy od kierunku działania wiatru.W odległości 2 Mm od statku własnego płynie druga jednostka. Czy brak zakłóceń interfe-rencyjnych na ekranie radaru na statku własnym oznacza, że na widocznej jednostce jest wyłączony radar:a) tak; b) nie.Czy echo pośrednie obce może powstać jeżeli w zasięgu radaru znajduje się tylko jeden obiekta) tak; b) nie.Czy sektor półcienia radarowego jest zawsze szerszy od sektora cienia?tak; b) nie.Echa z poprzedniego cyklu pracy mogą ukazać się na:a) każdym zakresie pracy radaru;b) maksymalnych zakresach pracy radaru;
minimalnych zakresach pracy radaru.
Na wskaźniku radarowym zorientowanym względem dziobu wykryto echo kolizyjne na kącie kursowym 10o p.b. Wykonano zwrot w prawo o 20o. Po zwrocie echo znajduje się nadal na kącie kursowym 10o p.b. i płynie na zderzenie. Czy można na tej podstawie sądzić, że jest to na pewno echo pośrednie własne:
tak b) nie
Na ekranie radaru jest widoczne tylko jedno echo. Echo to znajduje się wewnątrz sektora cienia radarowego określonego dla tego radaru. Czy echo to może być echem pośrednim własnym?
a) tak; b) nie.
Zniekształcenie ostrości obrazu ma największy wpływ na kształt ech na ekranie radaru:
na najmniejszych zakresach obserwacji;
na największych zakresach obserwacji;
wpływ ten nie zależy od zakresu obserwacji.
BUDOWA RADARU
NADAJNIK
Generator impulsów spustowych (czasoster) wytwarza impulsy:
prostokątne; b) piłokształtne; c) szpilkowe; d) sinusoidalne.
Generator impulsów spustowych (czasoster) steruje pracą:
układu zasięgowej regulacji wzmocnienia; b) układu wzmocnienia ogólnego;
układu kreski namiarowej; d) układu impulsu podstawy czasu.
Moc impulsów sondujących radaru zależy od amplitudy impulsów modulatora:
tak; b) nie.
Energia impulsów sondujących radaru zależy od amplitudy impulsów modulatora:
tak; b) nie.
Długość impulsów sondujących radaru zależy od czasu trwania impulsów modulatora:
tak; b) nie.
W modulatorach z półprzewodnikowymi elementami sterującymi zastosowano:
a) tyratrony; b) trygatrony; c) tyrystory.
Modulator steruje pracą:
magnetronu; b) rezonatora echa;
c) podmodulatora; d) układu podstawy czasu;
klistronu; f) wzmacniacza pośredniej częstotliwości.
Linie sztuczne stosuje się jako elementy gromadzące energię w modulatorach:
tak; b) nie.
O czasie trwania impulsu sondującego decyduje liczba ogniw linii sztucznej:
a) tak; b) nie.
Magnetron jest:
lampą próżniową; b) lampą gazową;
c) elementem półprzewodnikowym; d) układem scalonym.
Częstotliwość radaru zależy od:
a) częstotliwość prądu zasilającego; b) częstotliwości impulsów modulatora;
c) wymiarów geometrycznych rezonatorów wnękowych magnetronu;
d) liczby rezonatorów wnękowych magnetronu.
Moc impulsów sondujących radaru zależy od wymiarów geometrycznych wnęk rezonanso-wych magnetronu?
tak; b) nie.
Magnetron może mieć nieparzystą liczbę rezonatorów wnękowych?
tak; b) nie.
TOR FALOWODOWY, ANTENA
Przełącznik nadawanie - odbiór powinien być instalowany:
na wyjściu nadajnika; b) na wejściu odbiornika;
Radar pasma X jest wyposażony w antenę o takiej samej długości jak radar pasma S. Zysk energetyczny anteny radaru pasma X jest:
a) równy; b) mniejszy od; c) większy od zysku energetycznego radaru pasma S.
Rozdzielczość kątowa radaru zależy od długości zastosowanej anteny szczelinowej:
tak; b) nie.
Ze wskazań monitora mocy można korzystać celem zestrojenia radaru:
tak; b) nie.
Monitor mocy umożliwia:
odbiór impulsów sondujących;
diagnostykę radaru;
zestrojenie toru odbiorczego.
Rezonator echa umożliwia:
odbiór impulsów sondujących;
diagnostykę układu antenowego;
zestrojenie toru odbiorczego.
Ze wskazań rezonatora echa można korzystać celem zestrojenia radaru:
tak; b) nie.
Współczynnik tłumienia falowodu jest:
a) mniejszy; b) równy; c) większy od współczynnik tłumienia kabla koncentrycznego.
Każde złącze dwóch odcinków falowodowych musi mieć blaszkę uszczelniającą:
tak; b) nie.
ODBIORNIK, WSKAŹNIK
Zasięg radaru zależy od poprawności działania przełącznika N/O:
a) tak; b) nie.
Pokrętłem strojenia dostraja się:
częstotliwość drgań lokalnego oscylatora do częstotliwości impulsów magnetronu;
częstotliwość drgań lokalnego oscylatora do częstotliwości powtarzania impulsów modulatora;
częstotliwość impulsów magnetronu do częstotliwości drgań lokalnego oscylatora.
Szumy na wyjściu mieszacza zrównoważonego (z dwoma diodami) są:
większe niż na wyjściu mieszacza jednodiodowego;
mniejsze niż na wyjściu mieszacza jednodiodowego;
nie zależą od rodzaju mieszacza.
Efektem przepalenia jednej diody w mieszaczu zrównoważonym jest:
obniżenie czułości radaru;
całkowity brak zobrazowania sygnału wizyjnego na wskaźniku radaru.
Diody Schottkego charakteryzują się, w porównaniu z diodami ostrzowymi, żywotnością:
a) dłuższą; b) krótszą; c) taką samą.
Oscylator działający na zasadzie wykorzystania zjawiska Gunna jest:
lampą próżniową; b) lampą gazowaną;
elementem półprzewodnikowym.
Lokalny oscylator półprzewodnikowy stroi się mechanicznie:
w fabryce (u producenta); b) przez obsługę, każdorazowo po włączeniu radaru
przez serwis na statku; d) nie stroi się go mechanicznie wcale.
Dioda waraktorowa jest elementem:
mieszacza; b) lokalnego oscylatora lampowego;
c) lokalnego oscylatora półprzewodnikowego.
Lokalny oscylator lampowy stroi się mechanicznie:
w fabryce (u producenta); b) przez obsługę, każdorazowo po włączeniu radaru
przez serwis lub załogę na statku na statku; d) nie stroi się go mechanicznie wcale;
Klistron to nazwa lampowego lokalnego oscylatora:
tak; b) nie.
Klistron jest:
a) lampą dużej mocy pracującą impulsowo;
b) lampą małej mocy pracującą impulsowo;
c) lampą małej mocy pracującą w sposób ciągły;
d) lampą dużej mocy pracującą w sposób ciągły.
Włączenie rozróżnialnika może poprawić jakość zobrazowania na najmniejszych zakresach obserwacji:
tak; b) nie.
Włączenie rozróżnialnika tłumi amplitudę wszystkich ech radarowych:
tak; b) nie.
Impulsy z generatora podstawy czasu są podawane do:
modulatora; b) demodulatora;
mieszacza; d) wzmacniacza pośredniej częstotliwości;
wzmacniacza wizji; f) cewek odchylających lampy wizyjnej.
Wraz ze zmianą zakresu zmienia się:
amplituda impulsu podstawy czasu; b) czas narastania impulsu podstawy czasu.
Zmieniając zakres pracy radaru zmienia się czas trwania impulsu podświetlającego:
tak; b) nie.
Zmieniając wartość zakresu obserwacji nie zmienia się parametrów pracy:
czasosteru; b) układu impulsów podświetlających;
układu kręgów stałych; d) wzmacniacza wizji.
Układ sprężenia z anteną, w którego skład wchodzi rezolwer umożliwia obserwację analo-gowego obrazu radarowego na zakresie:
a) dowolnym; b) 3 Mm; c) 6 Mm; d) 12 Mm;
e) dowolnym, ale tylko jednym zdefiniowanym przez producenta.
Radarowy wskaźnik telewizyjny nie zapewnia możliwości obserwacji analogowego obrazu radarowego:
tak; b) nie.
Tylko lampa oscyloskopowa zapewnia możliwość obserwacji analogowego obrazu radaro-wego:
tak; b) nie.
Komparator jest elementem radaru z zobrazowaniem:
a) analogowym; b) cyfrowym c) każdym rodzajem zobrazowania.
Komparator służy do:
a) wyróżnienia ech użytecznych na tle zakłóceń;
b) automatycznego określenia pozycji echa;
c) zwiększenia zasięgu działania radaru.
Poziom napięcia progowego komparatora jest zadawany ręcznie pokrętłem:
ZRW; b) wzmocnienia ogólnego; c) jasności zobrazowania;
Rozróżnialnika; e) ZRW i wzmocnienia ogólnego
DIAGNOSTYKA
Na ekranie wskaźnika radarowego można zobaczyć impulsy rezonatora echa, lecz brak jest impulsów monitora mocy. Czy przyczyną niesprawności może być awaria magnetronu?
a) tak; b) nie.
Na ekranie wskaźnika radarowego można zobaczyć impulsy monitora mocy, lecz brak jest impulsów rezonatora echa. Czy przyczyną niesprawności może być awaria wzmacniacza pośredniej częstotliwości?
a) tak; b) nie.
Na ekranie wskaźnika radarowego nie można zobaczyć impulsów rezonatora echa i impul-sów monitora mocy. Czy przyczyną niesprawności może być awaria magnetronu?
a) tak; b) nie.
Na ekranie radaru włączonego na zakresie 12 Mm widoczny jest poprawny obraz, ale tylko w zakresie odległości od 0 (środek zobrazowania) do 9,3 Mm. W odległości od 9,3 Mm do krawędzi ekranu jest on „czarny” (nie widać sygnału wizyjnego i szumów oraz efektu działania pokręteł regulacyjnych). Najbardziej prawdopodobną przyczyną obserwowanego zniekształcenia jest:
uszkodzenie lampy wskaźnika radarowego;
uszkodzenie wzmacniacza wizji;
zła synchronizacja czasowa impulsu podświetlającego;
przepalenie jednej z diód mieszacza.
Na ekranie wskaźnika radarowego z niedziałającym wzmacniaczem wizyjnym są widoczne stałe kręgi odległości:
a) tak; b) nie.
POMIARY RADAROWE
Kąt należy na radarze określać na:
lewy skraj echa; b) środek echa; c) prawy skraj echa.
Odległość należy na radarze mierzyć do:
wewnętrznego skraju echa radarowego;
środka echa radarowego;
zewnętrznego skraju echa radarowego.
Układy VRM i FRM charakteryzują się taką sama dokładnością wskazań:
tak; b) nie
Dokładność pomiaru odległości radarem zależy od załączonej skali zobrazowania:
tak; b) nie.
Dokładność pomiaru kąta radarem zależy od załączonej skali zobrazowania:
tak; b) nie.
Pomiar odległości układem interscan jest zwykle mniej dokładny niż pomiar odległości kręgami stałymi i ruchomym kręgiem odległości:
a) tak; b) nie.
REFLEKTORY RADAROWE
Zasada działania biernego reflektora radarowego polega na:
zmniejszeniu do minimum rozproszenia impulsów odbijanych;
aktywnym wzmocnieniu amplitudy impulsu odbijanego;
wysyłaniu sygnału odpowiedzi.
Czy bierne reflektory radarowe należą do obowiązkowego wyposażenia łodzi ratunkowych i ratowniczych:
tak b) nie
Suma sektorów martwych w płaszczyźnie poziomej sprawnego biernego reflektora radarowego zbudowanego z 3 płytek metalowych jest równa w przybliżeniu następującej liczbie stopni:
10; b) 30; c) 60; d) 90; e) 120; f) 180.
Wzmacniacze ech radarowych zwiększają:
amplitudę ech radarowych; b) wymiary geometryczne ech radarowych.
Wzmacniacz ech radarowych działa w taki sam sposób jak aktywny reflektor radarowy:
tak; b) nie.
SART
Zasięg działania transpondera SART jest:
mniejszy od zasięgu działania EPIRB;
równy zasięgowi działania EPIRB;
większy od zasięgu działania EPIRB.
Sygnał transpondera SART to:
8 kropek; b) 10 kropek;
12 kropek; d) 15 kropek.
Długość sygnału odpowiedzi transpondera SART wynosi:
4 Mm; b) 6 Mm; c) 8 Mm; d) 10 Mm; e) 12 Mm.
Sygnał SART ma niżej wymienioną długość i składa się z:
10 Mm, 6 kropek; b) 12 Mm, 6 kropek;
10 Mm, 8 kropek; d) 12 Mm, 8 kropek;
8 Mm, 12 kropek; f) 2 Mm, 3 kropek.
SART pracuje w paśmie:
X; b) S; c) X i S; d) X lub S.
Nadajnik transpondera SART powinien być uruchomiony automatycznie przez radar samolotu (śmigłowca) lecącego na wysokości 3000 stóp z odległości równej co najmniej:
5 Mm; b) 10 Mm; c) 12 Mm; d) 20 Mm; e) 24 Mm; f) 30 Mm.
Transponder SART powinien być uaktywniany impulsami sondującymi radaru statkowego, którego antena jest zainstalowana na wysokości 15 m n.p.m., z odległości równej co najmniej:
5 Mm; b) 10 Mm; c) 15 Mm; b) 20 Mm;
5 lub 10 Mm (zależnie od daty instalacji);
10 lub 15 Mm (zależnie od daty instalacji).
RACONY
Ramark jest urządzeniem radiowym:
Biernym; b) nadawczym;
nadawczo - odbiorczym; d) odbiorczym.
Ramark umożliwia określenie:
tylko odległości do jego pozycji;
tylko kierunku na jego pozycję;
odległości i kierunku.
Jeżeli w wydawnictwie nawigacyjnym brak jest informacji o zasięgu raconu, to zasięg ten wynosi:
6 Mm; b) 8 Mm; c) 10 Mm; d) 12 Mm; e) 24 Mm.
Długość sygnału odpowiedzi raconu o zasięgu działania 10 Mm wynosi zwykle:
1 Mm; b) 2 Mm; c) 4 Mm; d) 5 Mm; e) 10 Mm.
Jeżeli w wydawnictwie nawigacyjnym nie podano informacji o długości sygnału odpowiedzi raconu, to długość ta wynosi:
a) 1/10 zasięgu raconu; b) 2/10 zasięgu raconu;
3/10 zasięgu raconu; d) 4/10 zasięgu raconu.
Racon nadający literę „K” można stosować do:
oznaczania osi toru wodnego;
oznaczania szczególnie ważnego niebezpieczeństwa;
oznaczania nowego niebezpieczeństwa;
oznaczania kotwicowiska;
do dowolnych celów nawigacyjnych;
do dowolnych celów nawigacyjnych innych niż oznaczanie nowego niebezpieczeń-stwa.
Sygnał raconu zmienno częstotliwościowego powinien być widoczny na ekranie radaru co najmniej raz na:
1 minutę; b) 2 minuty; c) 3 minuty; d) 4 minuty; e) 5 minut; f) 6 minut.
Do raconów typu USR należą:
SFR; b) FAR; c) ITOFAR; d) ARLR.
RACON „FAR” jest raconem typu:
USR; b) NSR.
Rozwiń skrót FSFR Fast sweep frequency racon
Rozwiń skrót FAR. Frequency agila racons
Czy na wskaźniku radaru nawigacyjnego można zobaczyć sygnał raconu stało częstotli-wościowego nie przeznaczonego do celów nawigacyjnych?
tak; b) nie.
Racon nadający literę „D” można stosować:
tylko do oznaczania kotwicowisk;
tylko do oznaczania nowych niebezpieczeństw;
do oznaczania osi torów wodnych;
do dowolnych celów nawigacyjnych.
RADARY FM-CW
W radarach FM - CW zastosowano modulację:
częstotliwości impulsu sondującego;
amplitudy impulsu sondującego;
fazy impulsu sondującego.
Radary FM-CW są radarami wykorzystującymi efekt Dopplera:
tak; b) nie.
Radarów FM - CW nie stosuje się aktualnie na statkach handlowych ze względu na:
zbyt mały zasięg działania;
zbyt wysoką cenę;
zbyt duże wymiary anteny.
Radary typu FM - CW pracują impulsowo:
tak; b) nie.
ZOBRAZOWANIA I ZORIENTOWANIA
Zobrazowaniem pilotowym nazywa się:
TM North-up; b) RM North-up;
TM Head-up; d) RM Head-up.
Podstawowym zobrazowaniem do celów antykolizyjnych jest:
zobrazowanie ruchu względnego zorientowane względem dziobu;
zobrazowanie ruchu względnego zorientowane względem kursu;
zobrazowanie ruchu względnego zorientowane względem północy;
zobrazowanie ruchu rzeczywistego.
NAKRESY RADAROWE
Sporządzanie nakresów radarowych jest obowiązkiem oficera wachtowego:
tak; b) nie.
Rysunek przedstawia 3 minutowy wektor ruchu względnego echa radarowego.
Echo to może być:
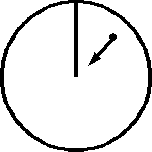
obiektem stałym; b) statkiem wyprzedzającym;
statkiem płynącym kontrkursem; d) statkiem płynącym kursem przecinającym.
Rysunek przedstawia 3 minutowy wektor ruchu względnego echa radarowego.
Echo to może być:
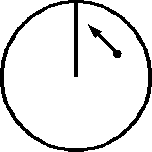
obiektem stałym; b) statkiem wyprzedzanym;
statkiem wyprzedzającym; d) statkiem płynącym kontrkursem;
Rysunek przedstawia 3 minutowy wektor ruchu względnego echa radarowego.
Echo to nie może być:
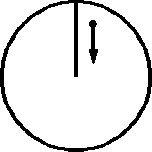
obiektem stałym;
statkiem wyprzedzanym;
statkiem wyprzedzającym;
statkiem płynącym kontrkursem;
statkiem płynącym kursem przecinającym.
Do wykonywania nakresów radarowych zaleca się wykorzystywanie radaru włączonego na zakresie (na akwenie nieograniczonym):
3Mm; b) 6 Mm; c) 12 Mm; d) 24 Mm.
Niedokładne zaznaczenie na rzutniku refleksyjnym drugiej pozycji echa (w czasie wykonywania nakresu na zobrazowaniu ruchu względnego) powoduje zniekształcenie informacji o:
Dmin i TDmin; b) KRo i Vo c) Dmin, TDmin, KRo i Vo tego echa.
Nakres na zobrazowaniu ruchu względnego umożliwia, w stosunku do nakresu na zobrazowaniu ruchu rzeczywistego, dokładniejszą i szybszą ocenę:
Dmin i TDmin; b) KRo i Vo śledzonego echa.
Dokładniejszy nakres można sporządzić na zorientowaniu:
względem dziobu;
względem kursu;
rodzaj zorientowania nie wpływa na dokładność nakresu.
Błędne wykreślenie zbyt długiego wektora prędkości statku własnego w czasie wykonywania nakresu na zobrazowaniu ruchu względnego spowoduje zniekształcenie informacji o:
Dmin i TDmin; b) KRo i Vo c) Dmin, TDmin, KRo i Vo tego echa.
Nakres na zobrazowaniu ruchu rzeczywistego umożliwia, w stosunku do nakresu na zobrazowaniu ruchu względnego, dokładniejszą i szybszą ocenę:
Dmin i TDmin; b) KDd i Vo śledzonego echa.
Mając jedno echo kolizyjne, oficer sporządził w stosunku do niego nakres radarowy na zobrazowaniu ruchu względnego, po czym wykonał zaplanowany na nakresie manewr statku własnego. Czy nieprzemieszczanie się echa po zaplanowanej drodze względnej po wykonaniu manewru statku własnego jest dowodem zbyt małej dokładności nakresu?
tak; b) nie.
POMOCE NAKRESOWE
Skrót EPA oznacza:
estimated position aid; b) electronic position aid;
electronic plotting aid; d) estimated plotting aid.
Skrót ATA oznacza automatic tracking aid:
tak; b) nie.
EPA jest wyposażona w ekstraktor:
tak; b) nie.
ATA jest wyposażona w ekstraktor:
tak; b) nie.
Zgodnie z przepisami, ATA i ARPA powinny spełniać takie same wymagania dokładno-ściowe:
tak; b) nie.
Zgodnie z przepisami, ATA i ARPA powinny śledzić taką samą liczbę ech radarowych:
tak; b) nie
Zgodnie z przepisami, ATA i ARPA powinny mieć układ manewru próbnego:
tak; b) nie.
ARPA, powinna posiadać, w przeciwieństwie do ATA, układ automatycznej akwizycji:
tak; b) nie.
ARPA
Ekstraktor jest elementem składowym:
radaru ze wskaźnikiem klasycznym;
radaru ze wskaźnikiem syntetycznym;
ARPA.
ARPA powinna posiadać układy akwizycji ręcznej i automatycznej.
tak; b) nie.
Czas trwania akwizycji echa zależy od stabilności ruchu:
statku własnego; b) echa akwizowanego;
c) statku własnego i echa akwizowanego; d) nie zależy od w/w czynników.
Czas trwania akwizycji echa zależy od poziomu zakłóceń hydrometeorologicznych
tak; b) nie.
Stan morza wpływa na czas akwizycji ech przez ARPA:
tak; b) nie.
Jakość pracy układu automatycznej akwizycji zależy od jakości obrazu radarowego ustawionego ręcznie przez operatora na wskaźniku ARPA:
tak; b) nie.
Zgodnie z przepisami, ARPA powinna śledzić co najmniej:
5; b) 10; c) 20; d) 40; e) 50 ech radarowych.
ARPA powinna śledzić echo wyraźnie widoczne w czasie co najmniej:
a) 1 z 3: b) 2 z 5, c) 2 z 10; 5 z 10 kolejnych obrotów anteny
Zgodnie z zaleceniami IMO, ARPA może prezentować informację o parametrach ruchu ech śledzonych tylko w formie graficznej:
tak; b) nie.
ARPA powinna prezentować informację o pozycjach przeszłych ech śledzonych ze względu na:
zbyt małą dokładność informacji prezentowanej w formie wektorowej;
opóźnienie czasowe informacji prezentowanej w formie wektorowej.
ARPA powinna obliczać wartość TDmin śledzonego obiektu z błędem nie większym niż:
1 minuta; b) 2 minuty; c) 3 minuty; d) 5 minut; e) 6 minut.
ARPA powinna obliczać wartość Dmin śledzonego obiektu z błędem nie większym niż:
1 kbl; b) 7 kbl; c) 1 Mm; d) 2 Mm.
Dokładność procesu śledzenia zależy od odległości do śledzonego obiektu:
tak; b) nie.
Dokładność określenia przez ARPA kursu rzeczywistego śledzonego obiektu zależy od dokładności informacji o prędkości statku własnego:
tak; b) nie.
Dokładność obliczenia przez ARPA kursu rzeczywistego śledzonego obiektu zależy od rodzaju załączonego zobrazowania radarowego:
tak; b) nie.
ARPA wykrywa szybciej manewr obiektu śledzonego:
a) zmiany kursu; b) zmiany prędkości; c) rodzaj manewru nie wpływa na ten czas.
Dokładność procesu śledzenia zależy od stabilności ruchu:
statku własnego; b) statku własnego i echa śledzonego;
echa śledzonego; d) nie zależy od wyżej wymienionych czynników.
Główną przyczyną błędów obliczania przez ARPA wartości Dmin i TDmin ech śledzonych jest zbyt mała dokładność informacji o:
kursie statku własnego;
prędkości statku własnego;
odległości i położeniu kątowym (namiarze) obiektu śledzonego.
ARPA jest najbardziej odporna na zakłócenia hydrometeorologiczne w czasie:
a) akwizycji echa; b) śledzenia zgrubnego echa c) śledzenia właściwego echa.
Informację o kursie statku własnego należy potwierdzić lub wprowadzić po włączeniu każdej ARPA:
tak; b) nie.
Kryterium działania alarmu „Nowe echo” jest takie samo we wszystkich ARPA:
tak; b) nie.
Wyszukiwarka
Podobne podstrony:
ściąga do ćwiczennia XII, Szkoła, penek, Przedmioty, Urządzenia nawigacyjne, Zaliczenie, egzamin, Ś
Urządzenia nawigacyjne - Notatka do Kolokwium z wykładów, Akademia Morska, I semestr, urządzenia naw
cw2, Akademia Morska Szczecin, SEMESTR III, URZĄDZENIA NAWIGACYJNE, Laborki
ściąga do I ćwiczenia, Szkoła, penek, Przedmioty, Urządzenia nawigacyjne, Zaliczenie, egzamin, Ściąg
URZĄDZENIA NAWIGACYJNE, Akademia Morska Szczecin, SEMESTR V, Urządzenia Nawigacyjne
urządz-egzamin, Szkoła, penek, Przedmioty, Urządzenia nawigacyjne, Zaliczenie, egzamin, Ściągi do ćw
GPS, Szkoła, penek, Przedmioty, Urządzenia nawigacyjne, Zaliczenie, egzamin, Ściągi do ćwiczeń
cw4, Akademia Morska Szczecin, SEMESTR III, URZĄDZENIA NAWIGACYJNE, Laborki
urz dzenia nav, Szkoła, penek, Przedmioty, Urządzenia nawigacyjne, Teoria
Opracowanie na kolokwium, Akademia Morska, I semestr, urządzenia nawigacyjne, Test do Gucmy, Urządze
un KWIT, Akademia Morska Szczecin, Semestr VIII, Urządzenia nawigacyjne
ściąga do IV ćwiczenia, Szkoła, penek, Przedmioty, Urządzenia nawigacyjne, Zaliczenie, egzamin, Ścią
URZĄDZENIA NAWIGACYJNE-ARPA-WYKLADY-VI SEMESTR
2. Posługiwanie się busolą i satelitarnym urządzeniem nawiga, Dokumenty MON, PODRECZNIK
urządzenia, Nawigacja, urządzenia
cw5, Akademia Morska Szczecin, SEMESTR III, URZĄDZENIA NAWIGACYJNE, Laborki
Skróty z urządzeń GPS, Akademia Morska Szczecin Nawigacja, uczelnia, AM, UN lab, Urządzenia Nawigacy
ściąga do II ćwiczenia, Szkoła, penek, Przedmioty, Urządzenia nawigacyjne, Zaliczenie, egzamin, Ścią
Wstępna analiza urządzeń nawigacyjnych z USA
więcej podobnych podstron