Zespół Dydaktyczno-Naukowy Napędów i Sterowania
Instytut Maszyn Roboczych Ciężkich PW
Laboratorium Elektrotechniki i Elektroniki
Pracownia Maszyn Elektrycznych
Ćwiczenie M - 5
Badania silnika indukcyjnego jednofazowego
Data Wykonania ćwiczenia .17.IV 2000
Data oddania sprawozdania .......................
Ocena: ................
Wykonał zespół:
1.SANIUK ARTUR
2.PIWOŃSKI ARKADIUSZ
3.NAJDIENOW WITALIJ
4.KĘDZIERSKI MARCIN
Wydział: SiMR
Rok ak. II
Grupa: 2.3
SPRAWOZDANIE
Celem ćwiczenia jest zapoznanie się z eksploatacyjnymi parametrami silnika indukcyjnego jednofazowego w całym zakresie zmian jego obciążenia, od pracy przy biegu jałowym do obciążenia znamionowego (czyli w naszym przypadku do 2,2A).
Silnik indukcyjny jednofazowy składa się ze stojana i wirnika. Nieruchomy stojan jest wykonany z izolowanych wzajemnie blach stalowych i posiada na swym wewnętrznym obwodzie wycięte żłobki. W 2/3 wszystkich żłobków stojana jest umieszczone uzwojenie główne silnika. Pozostałe są wolne, lub nawinięte uzwojeniem rozruchowym, czyli tzw. fazą pomocniczą. Wirnik ma zazwyczaj budowę klatkową.
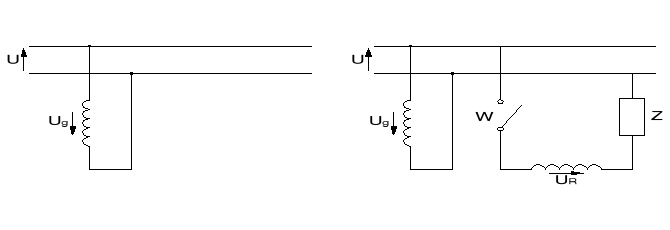
Po włączeniu takiego silnika do sieci, w uzwojeniu stojana popłynie prąd zmienny wzbudzający zmienne pole magnetyczne. Strumień magnetyczny jednak w tym przypadku pozostanie nieruchomy, ponieważ brak dwu następnych faz (tak jak w silniku 3-fazowym), które to ukierunkowałyby co powoduje powstanie pola o charakterze pulsującym, które nie jest „samo” w stanie ruszyć silnik z pozycji spoczynku. Podobną rolę spełnia w przypadku silników na prąd stały komutator, którego tu również nie ma. Aby więc silnik indukcyjny jednofazowy ruszył, trzeba nadać mu moment rozruchowy z zewnątrz (tak jak np. silnikowi spalinowemu). Można tego dokonać, m. in. za pomocą tzw. uzwojenia rozruchowego, które nadaje ten pierwszy moment rozruchowy. Dzieje się tak, ponieważ uzwojenie to przesunięte jest o 90º elektrycznych względem uzwojenia głównego. Potem należy je odłączyć. Wyjątkiem jest uzwojenie rozruchowe z kondensatorem o odpowiednio dobranej pojemności (jeden spośród trzech dodatkowych elementów R, L, C, służących do przesunięcia prądu uzwojenia rozruchowego względem uzwojenia głównego) kiedy to może być ono cały czas włączone w obwód. Rozwiązanie takie ma swoje pewne korzyści.
Poniżej znajdują się odpowiednio schematy silnika bez uzwojenia rozruchowego oraz wraz z tym uzwojeniem.
Odpowiednie ustawienie stosunku momentu rozruchowego względem nominalnego, oraz prądów tychże uzwojeń klasyfikuje dany silnik do różnych przeznaczeń (np. Mr/Mn = 1,0÷1,2, oraz Ir/In = 6÷9 - silniki uruchamiane pod niewielkim obciążeniem, a Mr/Mn = 1,8÷2,0, oraz Ir/In = 3÷5 - silniki uruchamiane pod dużym obciążeniem, duże zastosowanie). Ich dużą zaletą jest prostota budowy i eksploatacji, taniość produkcji, oraz wygodne użytkowanie poprzez możliwość podłączenia go pod siec jednofazową. Wadą natomiast jest konieczność stosowania uzwojenia rozruchowego, oraz ograniczony zakres mocy ze względu na ew. konieczność stosowania dodatkowych urządzeń do rozruchu. Prędkość regulowana jest za to dość prosto, bo poprzez zmianę napięcia zasilającego, co jednak ogranicza dość znacznie zakres prędkości obrotowych i mocy. Z tego powodu używa się ich do mniejszych maszyn, jak wentylatory i innych urządzeniach gospodarstwa domowego.
Ćwiczenie polegało na sporządzeniu charakterystyk silnika indukcyjnego jednofazowego, czego 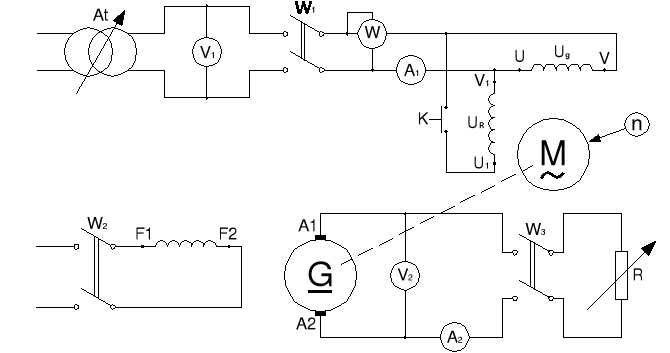
dokonaliśmy za pomocą poniższego układu:
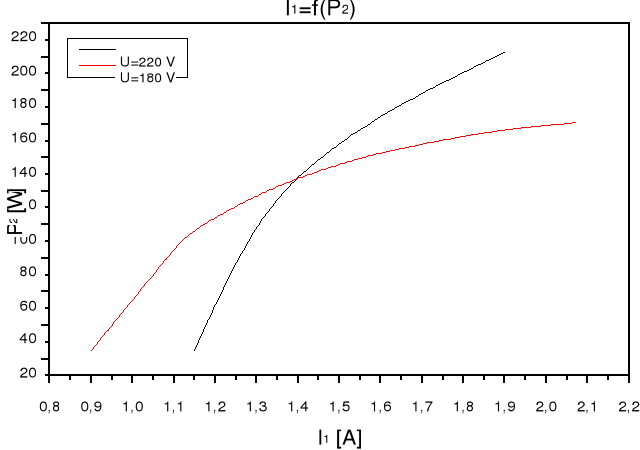
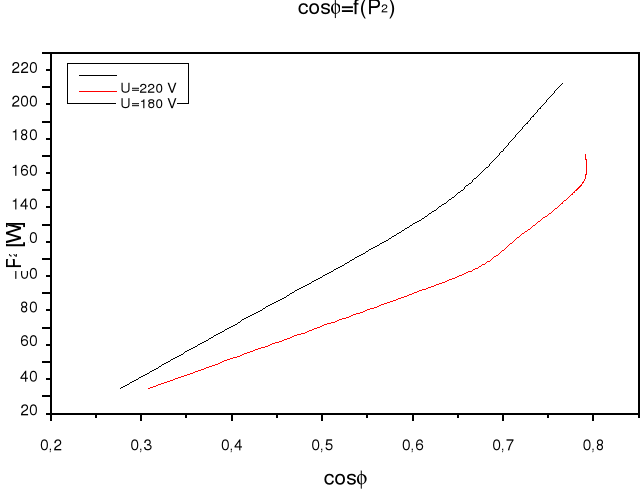
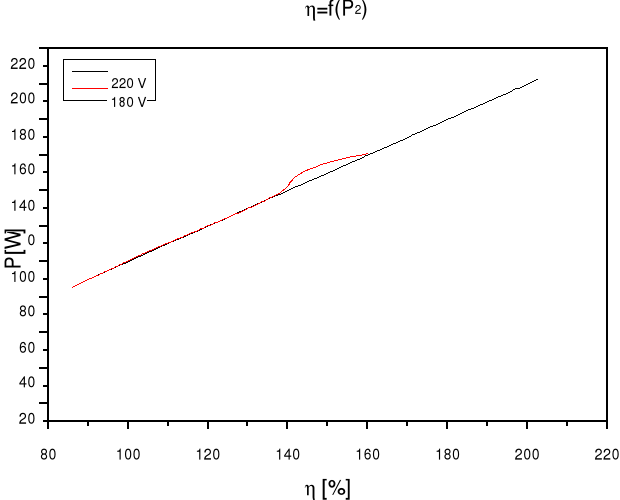
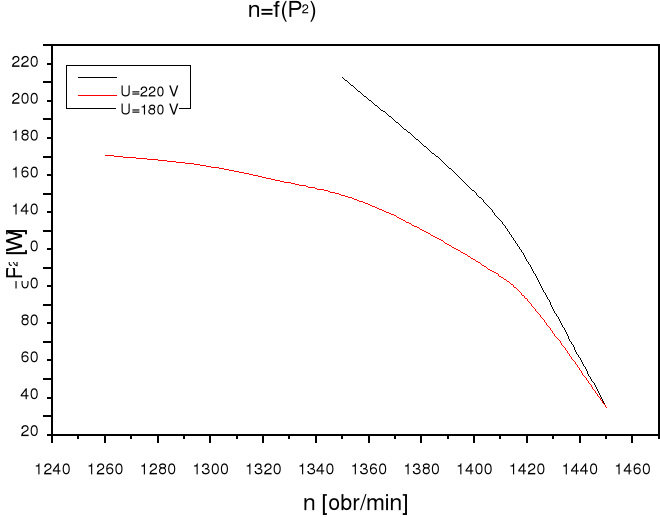
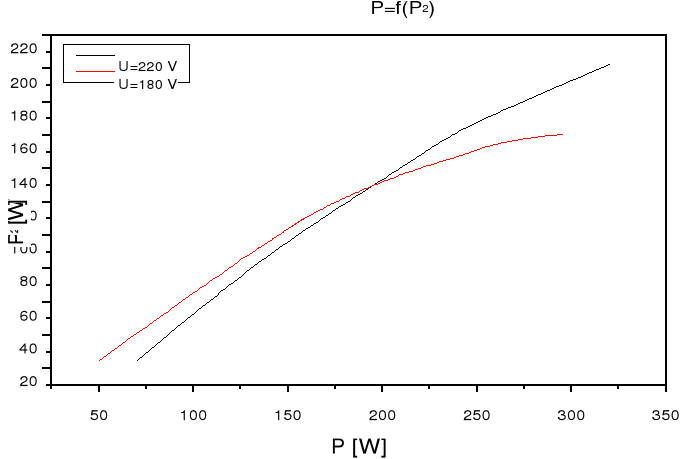
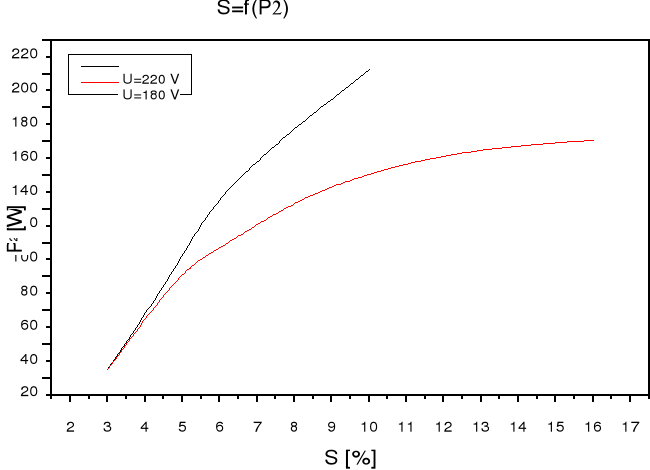
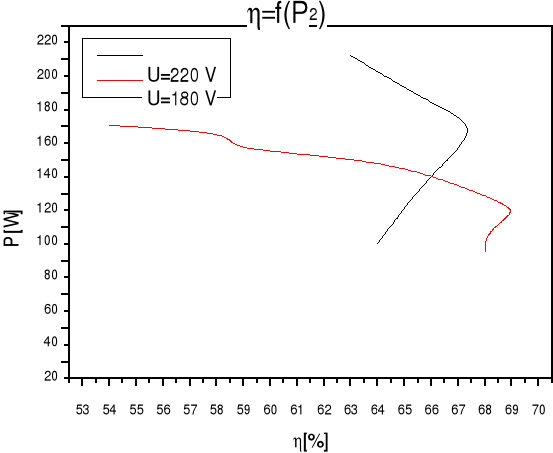
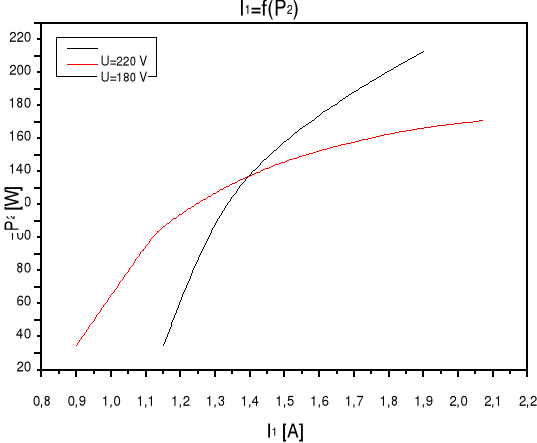
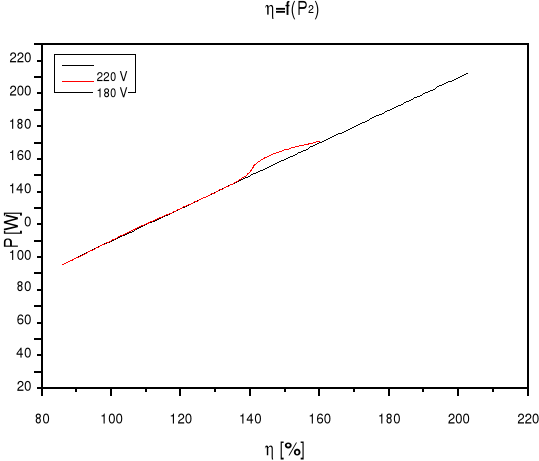
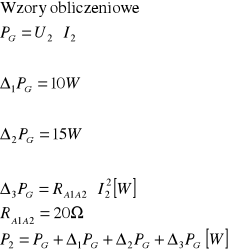
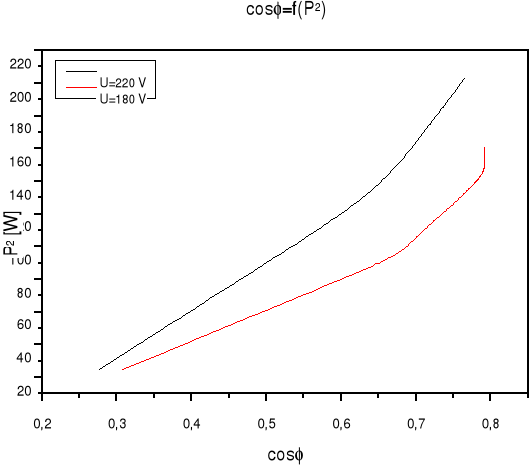
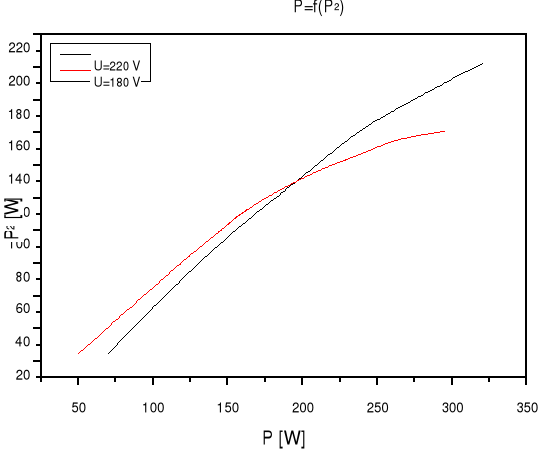
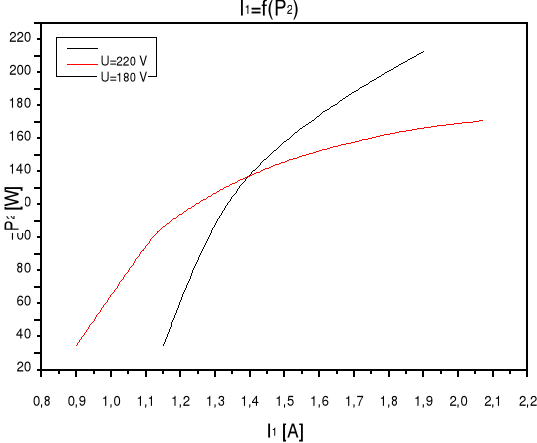
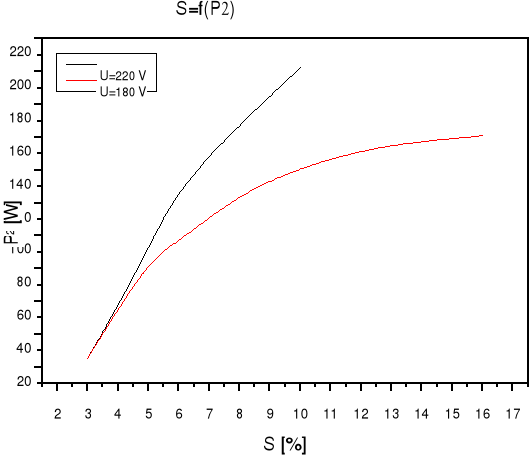
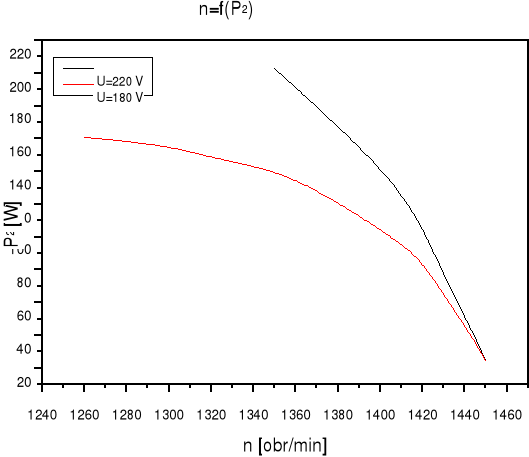
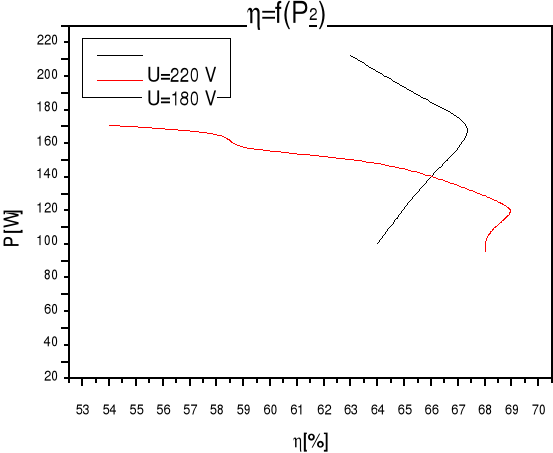
Wyniki pomiarów zostały zebrane poniżej w tabelkach w dwóch seriach dla dwóch różnych napięć U1 (220V i 180V), oraz w postaci załączonych odpowiednich wykresów.
Lp. |
Wielkości mierzone |
Wielkości obliczone |
|||||||||||
|
U1 |
I1 |
P |
n |
U2 |
I2 |
PG |
Δ3PG |
P2 |
ηG |
ηS |
cosϕ |
S |
|
V |
A |
W |
obr/min |
V |
A |
W |
W |
W |
% |
% |
- |
% |
1 |
220 |
1,15 |
70 |
1450 |
180 |
0 |
0 |
0 |
25 |
0 |
- |
0,277 |
3 |
2 |
220 |
1,27 |
140 |
1425 |
175 |
0,36 |
63 |
2,592 |
90,592 |
69,5 |
64 |
0,501 |
5 |
3 |
220 |
1,4 |
200 |
1410 |
168 |
0,6 |
100,8 |
7,2 |
133 |
75,8 |
66 |
0,649 |
6 |
4 |
220 |
1,55 |
235 |
1400 |
165 |
0,75 |
123,75 |
11,25 |
160 |
77,3 |
68 |
0,689 |
6,5 |
5 |
220 |
1,65 |
260 |
1375 |
160 |
0,84 |
134,4 |
14,112 |
173,512 |
77,5 |
66 |
0,716 |
8 |
6 |
220 |
1,9 |
320 |
1350 |
150 |
1,04 |
156 |
21,632 |
202,632 |
77 |
63 |
0,765 |
10 |
Lp. |
Wielkości mierzone |
Wielkości obliczone |
|||||||||||||||||||||||
|
U1 |
I1 |
P |
n |
U2 |
I2 |
PG |
Δ3PG |
P2 |
ηG |
ηS |
cosϕ |
S |
||||||||||||
|
V |
A |
W |
obr/min |
V |
A |
W |
W |
W |
% |
% |
- |
% |
||||||||||||
1 |
180 |
0,9 |
50 |
1450 |
180 |
0 |
0 |
0 |
25 |
0 |
- |
0,308 |
3 |
||||||||||||
2 |
180 |
1,1 |
125 |
1420 |
172 |
0,34 |
58,48 |
2,312 |
85,792 |
68,2 |
68 |
0,631 |
5 |
||||||||||||
3 |
180 |
1,14 |
140 |
1410 |
170 |
0,4 |
68 |
3,2 |
96,2 |
70,7 |
68 |
0,682 |
6 |
||||||||||||
4 |
180 |
1,25 |
155 |
1400 |
167 |
0,47 |
78,49 |
4,418 |
107,908 |
72,7 |
69 |
0,688 |
6,5 |
||||||||||||
5 |
180 |
1,26 |
162 |
1380 |
165 |
0,5 |
82,5 |
5 |
112,5 |
73,3 |
69 |
0,714 |
8 |
||||||||||||
6 |
180 |
1,37 |
185 |
1375 |
162 |
0,58 |
93,96 |
6,728 |
125,688 |
74,8 |
67 |
0,750 |
8 |
||||||||||||
7 |
180 |
1,56 |
220 |
1350 |
157 |
0,68 |
106,76 |
9,248 |
141,008 |
75,7 |
64 |
0,783 |
10 |
||||||||||||
8 |
180 |
1,68 |
240 |
1325 |
155 |
0,72 |
111,6 |
10,368 |
146,968 |
79,3 |
58 |
0,793 |
11 |
||||||||||||
9 |
180 |
1,86 |
260 |
1300 |
150 |
0,79 |
118,5 |
12,482 |
155,982 |
76 |
59 |
0,776 |
13 |
||||||||||||
10 |
180 |
2,07 |
295 |
1260 |
145 |
0,84 |
121,8 |
14,112 |
160,912 |
76 |
54 |
0,791 |
16 |
||||||||||||
Wraz ze wzrostem obciążenia silnika (najpierw przez włączenie nieobciążonej prądnicy, a potem przez jej dodatkowe obciążenie za pomocą oporu R) rośnie moc silnika (P), rosną prądy, zarówno w obwodzie silnika (I1) jak i obwodzie prądnicy (I2) w przeciwieństwie do napięcia na jej zaciskach (U2), które spada wraz z prędkością obrotową silnika (n). Właściwie wszystkie wartości obliczone rosną, za wyjątkiem sprawności prądnicy , która to najpierw rośnie, a potem maleje. Natomiast poślizg rośnie w miarę jednostajnie we wszystkich przypadkach.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Wyszukiwarka
Podobne podstrony:
PIII - teoria, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektro
elektra P4, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektronik
elektra M4, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektronik
jasiek pytania, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektr
M2, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektronika i Elek
Wnioski do stanu jałowego trafo, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II
Elektra M-2spr, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektr
elektra M5, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektronik
Transformator, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektro
Pomiary-protokół, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elek
elektra M6a, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektroni
Wnioski M2, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektronik
pytania na egzamin z elektrotechniki ii ciag 1, Studia, SiMR, II ROK, III semestr, Elektrotechnika i
Tabele-elektraP1, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elek
elektra M4 tab, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektr
Sprawko z P2, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektron
elektra p1, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektronik
elektra p1i, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektroni
więcej podobnych podstron