1. Cel ćwiczenia
Celem ćwiczenia jest poznanie metod analizy błędów pomiaru pośredniego, w tym metody logarytmicznej oraz metody różniczki zupełnej, a także określenie czynników wpływających na błąd pomiaru w pomiarach pośrednich.
2. Układy pomiarowe i tabele pomiarowe
2.1. Pomiar modułu impedancji
Układ pomiarowy do pomiaru modułu impedancji jest przedstawiony na rysunku 1.
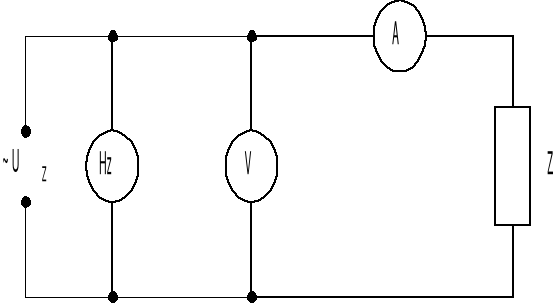
Rys.1. Układ do pomiaru modułu impedancji cewki. Hz - częstościomierz , A - amperomierz, V - woltomierz, Z - badana cewka, UZ - napięcie zasilania (autotransformator)
Wyniki pomiarów, zakresy i klasy mierników zanotować w tabeli 1.
Tabela 1
Lp. |
Amperomierz |
Woltomierz |
Z |
Uwagi |
||||
|
α[dz] |
c1[A/dz] |
I[A] |
α[dz] |
cv[V/dz] |
U[V] |
[Ω] |
|
|
|
|
|
|
|
|
|
ZA=...[A] |
1 |
|
|
|
|
|
|
|
kA=... |
2 |
|
|
|
|
|
|
|
Zv=...[V] |
. |
|
|
|
|
|
|
|
kV=... |
. |
|
|
|
|
|
|
|
f=...[Hz] |
2. 2. Pomiar rezystancji metodą techniczną
Schemat układu pomiarowego jest przedstawiony na rysunku 2.
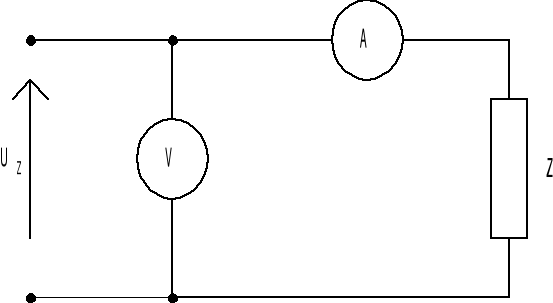
Rys.2. Schemat układu do pomiaru rezystancji metodą techniczną:
A - amperomierz, V - woltomierz, Z - badana cewka, UZ - napięcie zasilania (zasilacz stabilizowany)
Wyniki zanotować w tabeli 2.
Tabela 2
Lp. |
Amperomierz |
Woltomierz |
R |
Uwagi |
|
|
|
|
|||||||||
|
α[dz] |
c1[A/dz] |
I[A] |
α[dz] |
cv[V/dz] |
U[V] |
[Ω] |
|
|||||||||
|
|
|
|
|
|
|
|
ZA=...[A] |
|||||||||
1 |
|
|
|
|
|
|
|
kA=... |
|||||||||
2 |
|
|
|
|
|
|
|
Zv=...[V] |
|||||||||
. |
|
|
|
|
|
|
|
kV=... |
|||||||||
. |
|
|
|
|
|
|
|
f=...[Hz] |
|||||||||
2. 3. Pomiar rezystancji w układzie z watomierzem
Schemat układu pomiarowego jest przedstawiony na rysunku 3.
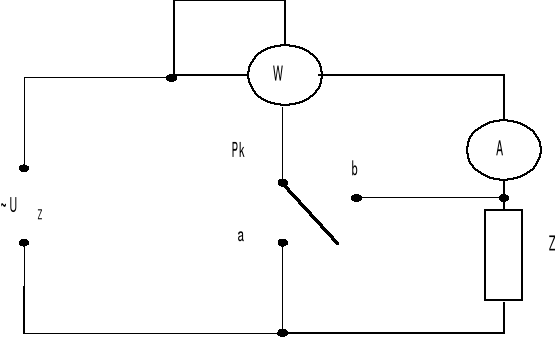
Rys.3 Układ do pomiaru rezystancji cewki: UZ -napięcie zasilania (autotransformator), A-amperomierz, V-woltomierz, W-watomierz, Z - badana cewka.
Wyniki należy zanotować w tabeli 3.
Tabela 3
Pozycja "a" |
Pozycja "b" |
Uwagi |
|||||||||
Lp. |
Amperomierz |
Watomierz |
R |
Watomierz |
|
||||||
. |
α[dz] |
c1[A/dz] |
I[A] |
α[dz] |
cw[W/dz] |
P[W} |
[Ω] |
α[dz] |
cw[W/dz] |
P[W] |
ZA=...[A] |
1 |
|
|
|
|
|
|
|
|
|
|
kA=... |
2 |
|
|
|
|
|
|
|
|
|
|
Zw=...[W] |
3 |
|
|
|
|
|
|
|
|
|
|
kw=... |
. |
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. 4. Pomiar rezystancji metodą bezpośrednią
Do pomiaru rezystancji badanej cewki metodą bezpośrednią można wykorzystać cyfrowy mostek uniwersalny RLC. Po dołączeniu badanego elementu do zacisków pomiarowych mostka należy odczytać wskazanie przyrządu oraz zanotować zakres pomiarowy, na którym pomiar został wykonany, a także klasę mostka. Wyniki pomiaru oraz odczytane parametry należy zanotować w tabeli 4.
Tabela 4
Zakres |
Klasa |
Wskazanie |
ΔR |
[Ω] |
[%] |
[Ω] |
[Ω] |
|
|
|
|
1. Cel ćwiczenia:
Celem ćwiczenia jest poznanie działania kompensatora napięcia stałego oraz jego zastosowanie do pomiarów siły elektromotorycznej, napięcia, natężenia prądu, rezystancji a także wyznaczenie błędów występujących w pomiarach kompensacyjnych oraz analiza wpływu dokładności użytych do jego budowy elementów .
2. Układy pomiarowe i tabele pomiarowe
2.1. Pomiar napięcia UX za pomocą kompensatora Feussnera
Schemat układu pomiarowego jest przedstawiony na rysunku 1.
Rys.1 Schemat układu do pomiaru SEM EX za pomocą kompensatora
Feussnera
Należy przeprowadzić co najmniej kilkanaście pomiarów tej samej wartości EX i wyniki pomiarów zanotować w tabeli 1.
Tabela 1
|
RK[Ω] |
Ex[V] |
ΔRK[Ω] |
ΔEx[V] |
α[dz] |
Ex[V] |
δSg[%] |
δn[%] |
δ[%] |
Ex±ΔEx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Na podstawie przeprowadzonych pomiarów można także oszacować błędy przypadkowe, jakimi obarczone są pomiary. Wartość błędów przypadkowych należy określić dla każdego pomiaru za pomocą metody Gaussa. Wyniki danych i obliczeń należy zanotować w tabeli 2.
Tabela 2
|
Rk[Ω] |
Ex[V] |
Ex[V] |
ΔEx[V] |
σr |
ΔEx>3. σr |
σEx |
Ex±3σEx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wyszukiwarka
Podobne podstrony:
zamiejscizaoczne2012, Elektrotechnika, SEM4, Metrologia Krawczyk
Cw2 mostek thomsona, Elektrotechnika, SEM4, Metrologia Krawczyk
Cw1 pom mocy, Elektrotechnika, SEM4, Metrologia Krawczyk
Metrologia sem 2 Tr El EiT 1, Elektrotechnika, SEM4, Metrologia Krawczyk
Cw3 analiza bledow, Elektrotechnika, SEM4, Metrologia Krawczyk
Cw4 pomiary kompensacyjne, Elektrotechnika, SEM4, Metrologia Krawczyk
Cw3.mostek Wheanstona, Elektrotechnika, SEM5, Metrologia Krawczyk
Cw1 blad metody, Elektrotechnika, SEM5, Metrologia Krawczyk
Cw4.pomary oscyloskopowe, Elektrotechnika, SEM5, Metrologia Krawczyk
Cw2.rozszerzanie zakresow pom, Elektrotechnika, SEM5, Metrologia Krawczyk
Pytania zaliczeniowe II seria 1012elektrotechnika-1, Elektrotechnika, SEM5, Metrologia Krawczyk
Obwody magnetycznie sprzężone p, Elektrotechnika, SEM4, Teoria Pola Krawczyk
Badanie transformatora 1 fazowego p, Elektrotechnika, SEM4, Teoria Pola Krawczyk, wnioski
FERRO1, Elektrotechnika, SEM4, Teoria Pola Krawczyk, wnioski
Obwody magnetycznie sprzężone t(1), Elektrotechnika, SEM4, Teoria obw.Krawczyk
Obwody spzrężone, Elektrotechnika, SEM4, Teoria Pola Krawczyk, wnioski
Stany nieustalone t, Elektrotechnika, SEM4, Teoria Pola Krawczyk
Stany nieustalone p, Elektrotechnika, SEM4, Teoria Pola Krawczyk
więcej podobnych podstron