Stała dodawania - różnica pomiędzy długością rzeczywistą a pomierzoną.
Metody wyznaczania stałej dodawania:
- porównawcza(porównanie odległości danej i pomierzonej)
- różnicowa(na podstawie niezależnych obserwacji)
(dAB+k)+(dBD+k)=(dAD+k)
(dAC+k)+(dCD+k)=(dAD+k)
(dAB+k)+(dBC+k)+ (dCD+k)=(dAD+k)
Kolimacja
![]()
Inklinacja
![]()
Interferometr Weisali
Różnica dróg optycznych musi być równa 0
D01=D12
Interferometr Michelsona
Metoda Förstner'a
Metoda Nähbauera
Metoda
Kukkamäki
Podział termometrów:
- termometry cieczowe: zmiana objętości cieczy przy zmianie temperatury
- termometry kwarcowe: wykorzystują zjawisko zmiany częstotliwości drgań kwarcu pod wpływem zmiany temperatury
- termometry oporowe: zmiana oporu na skutek zmiany temperatury
- termometry deformacyjne: wykorzystują zmianę wymiarów ciała stałego na skutek zmiany temperatury(dylatacyjne, bimetaliczne)
- termometry manometryczne: zmiana ciśnienia na skutek zmiany temperatury
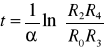
Termometry oporowe
R0 - opór w 0ºC
α - współczynnik temperatury
Mostek Winstona
G - galwanometr
Mostek zrównoważony
R1 = Rt (czuły na zmianę temperatury)
R2 - jest zmienny(zmieniamy opór aż zajdzie zjawisko)↓
R1R3 = R2R4 (w G nie płynie prąd)
Mostek niezrównoważony
R2 - jest stały
R4=R2=R3
Rg - opór galwanometru(amperomierza)
I - natężenie prądu(na amperomierzu)
U - przyłożone napięcie
Możemy tak przeskalować amperomierz żeby zamiast natężenia pokazywał temperaturę.
Elektroniczne odczyty kół podziałowych
- system kodowy
- system impulsowy(inkrementalny)
- system dynamiczny(czasowy)
System kodowy:
System impulsowy:
System dynamiczny:
Niwelatory kodowe
A
B
C
D
D
detektor
D01
D12
laser
zwierciadło półprzepuszczalne
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
a`4
![]()
![]()
![]()
![]()
a`3
a`2
a`1
![]()
d ≈ 15m
x
a`3
a`2
2x
![]()
![]()
a`1
![]()
![]()
![]()
![]()
a`4
![]()
G
R2
R3
R4
R1

ścieżki(każda następna podzielona jest na 2 razy więcej części)
koło odczytowe
4096 - szerokość ostatniego pierścienia(daje to dokładność ok. 10CC)
w praktyce stosuje się 12 pierścieni
każde położenia czytnika daje różny kod 01-kowy
1
0
1
0
0
1
określonemu kodowi 01-owemu odpowiada określona wartość koła
fotodiody
koło odczytowe
diody LED
para to 1 inkrement
maska(200 inkrementów)
wzmacnia sygnał i eliminuje wpływ błędnego podziału
koło składa się z 20 000 inkr.
podczas obrotu kołem natężenie światła się zmienia(sinusoidalnie)
układ prostujący „prostuje” a licznik zlicza impulsy zstępujące
jeden z inkrementów jest znacznikiem
Krąg obraca się z
f=2.959Hz(3 obr/sek)
N=1024 ink.
α
d
![]()
UP
GIS
B
Licznik
Procesor
Wyświetlacz
![]()
2 czytniki(nieruchome)
Φ jest mierzone przez fazomierz
n mierzony jest czas z jakim znacznik przejdzie od jednego do drugiego czytnika
W procesorze następuje korelacja sygnału od łaty z zapisanym kodem całej łąty w pamięci, po porównani wyświetlana jest wysokość i odległość
MFD
Pryzmat półprzepuszczalny
K
2º
MFD - matryca fotodetektorów diodowych
K - kompensator
MFD
wzmacniacz
przetwornik
Procesor
klawiatura
łata składa się z kodu kreskowego o grubości 2,025nm
pamięć
wyświetlacz
Wyszukiwarka
Podobne podstrony:
FOTODETEKTORY, gik, semestr 3, etp
cwiczenie, gik, semestr 3, etp
kol, gik, semestr 3, etp
cwiczenia, gik, semestr 3, etp
Wyznaczenie stałej dodawania etp, gik, semestr 3, etp
SPRAWOZDANIE-niwelator, gik, semestr 3, etp
wyklady2, gik, semestr 3, etp
obliczenia na etp, gik, semestr 3, etp
instrum, gik, semestr 3, etp
ETP II, gik, semestr 3, etp
Sprawko kolimacja inklinacjaOLA, gik, semestr 3, etp
wyklady, gik, semestr 3, etp
sprawozdanie ETP, gik, semestr 3, etp
Quasihoryzont Nabauer, gik, semestr 3, etp
ETP opracowanie pytaĹ , gik, semestr 3, etp
Sprawko kolimacja inklinacja, gik, semestr 3, etp
Wyznaczanie stałej dodawania SPRAWOZDANIE, gik, semestr 3, etp
pytania z wyzszej z 2 kolosa, gik, semestr 3, Geodezja wyższa, Kolokwium u margana
więcej podobnych podstron