Sterowanie silnikiem szeregowym
za pomocą regulatora typu PI
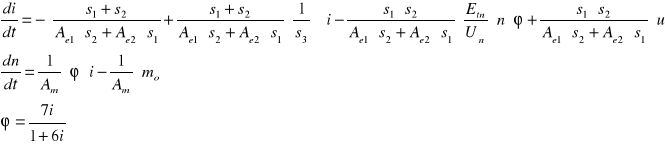
Równania różniczkowe opisujące pracę silnika szeregowego wyglądają następująco:
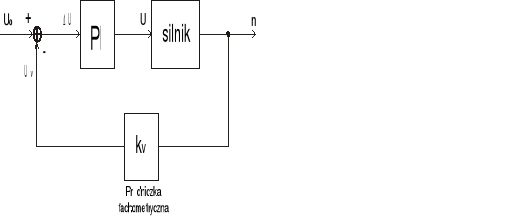
Po zastosowaniu sterowania regulatorem PI schemat układu wygląda następująco:
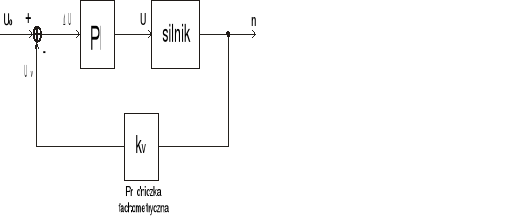
Napięcie U silnika jest pobierane z regulatora, do wejścia którego doprowadza się sygnał
![]()
(31)
gdzie: U0 - napięcie zadające
Uv - napięcie pobierane z prądniczki tachometrycznej ![]()
(32)
kv - stała prądniczki tachometrycznej.
Dla regulatora typu PI napięcie wyjściowe U ma następującą postać:

(33)
gdzie: kw - wzmocnienie regulatora ![]()
(34)
kp - stała proporcjonalności regulatora
kI - stała całkująca regulatora.
Wprowadzamy dodatkową zmienną x:
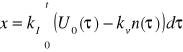
(35)
Podstawiając U do równania różniczkowego opisującego silnik szeregowy otrzymamy:
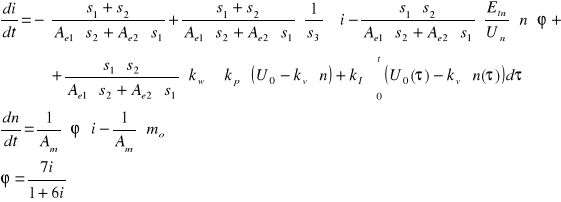
(36)
Przekształcając powyższy układ równań otrzymamy ostateczną postać równań różniczkowych, które następnie zostaną zamodelowane w programie Matlab:

(37)
Podstawiając dane silnika i dodatkowe stałe regulatora PI otrzymujemy:
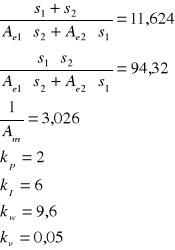
Podstawiając powyższe wyliczenia do układu równań (37) otrzymujemy:
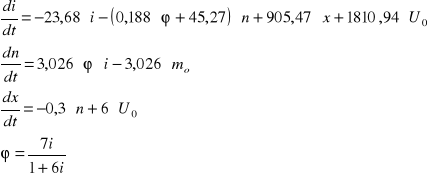
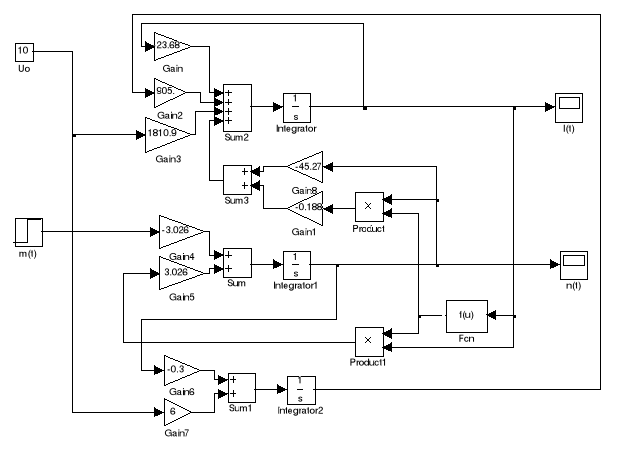
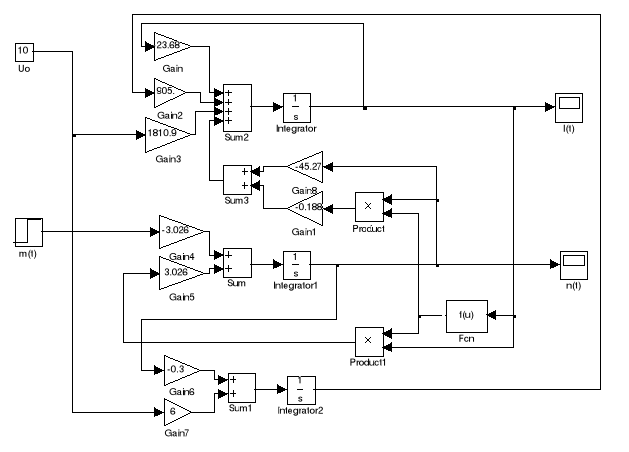
Zamodelowany układ równań różniczkowych wygląda następująco:
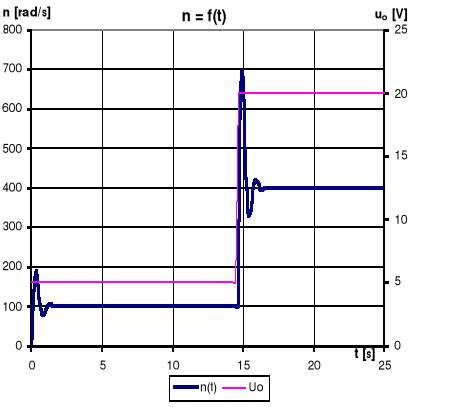
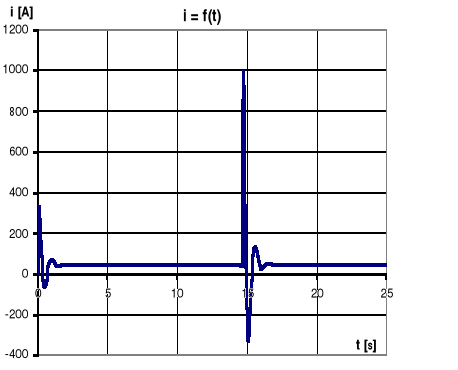
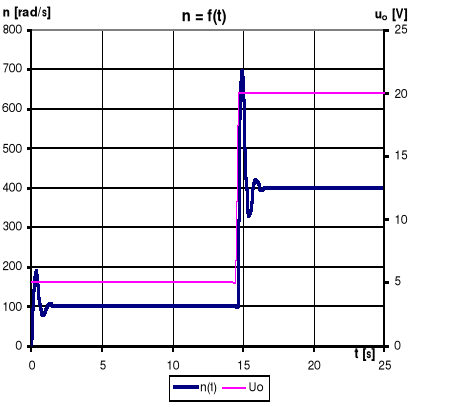
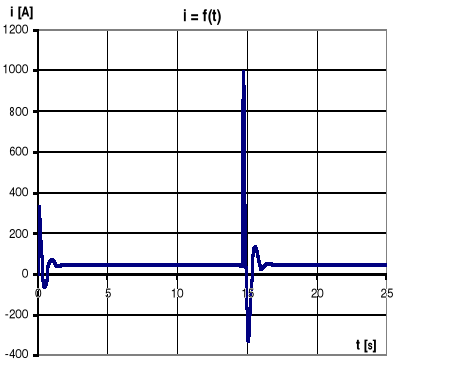
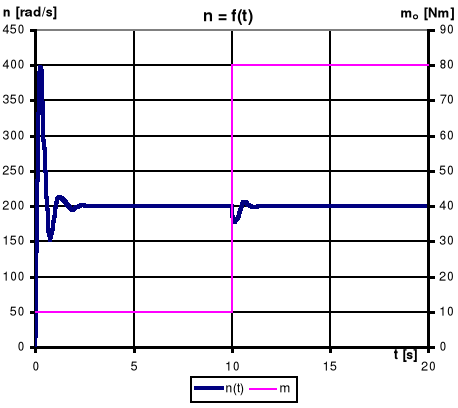
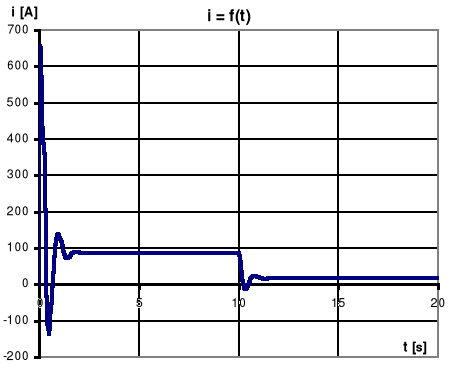
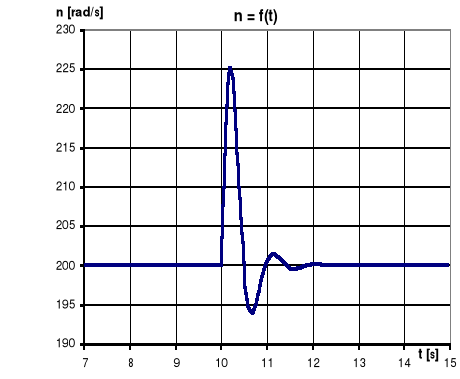
Zachowanie się silnika przy stałym obciążeniu i skokowej zmiany napięcia regulacji Uo:
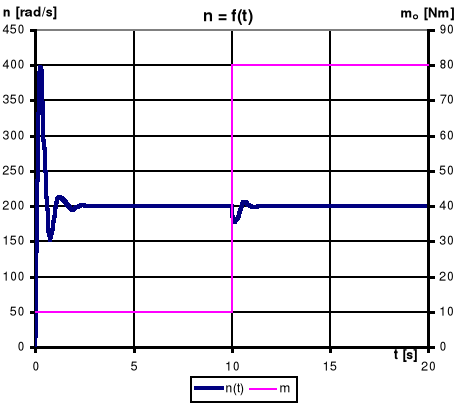
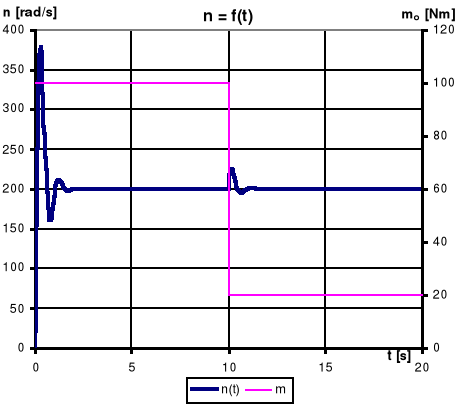
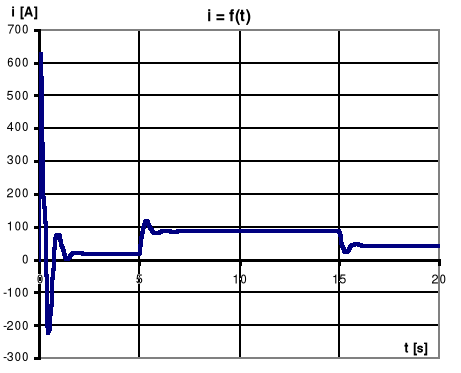
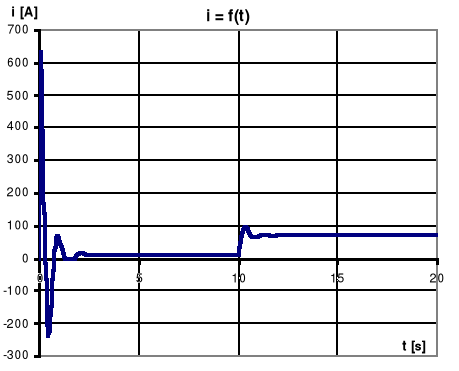
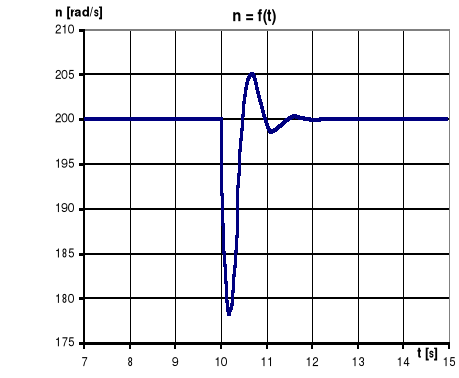
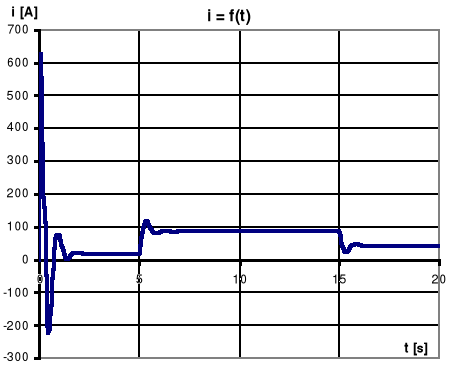
Zachowanie się silnika przy sokowym wzroście obciążenia i stałym napięciu regulacji Uo:
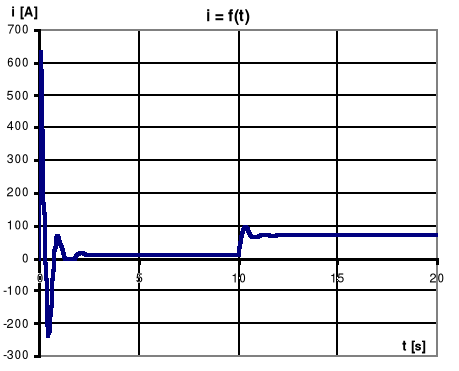
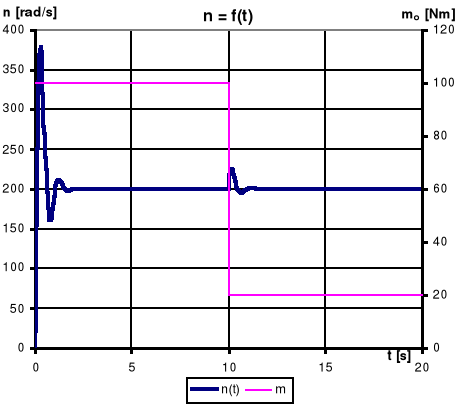
Zachowanie się silnika przy sokowym spadku obciążenia i stałym napięciu regulacji Uo:
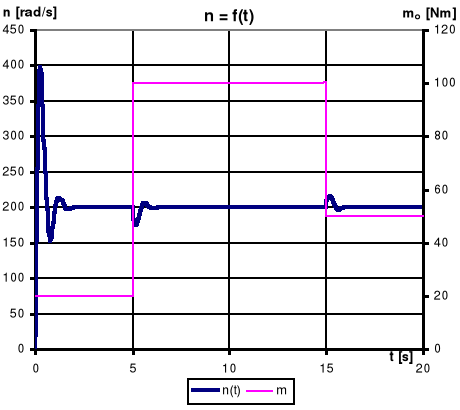
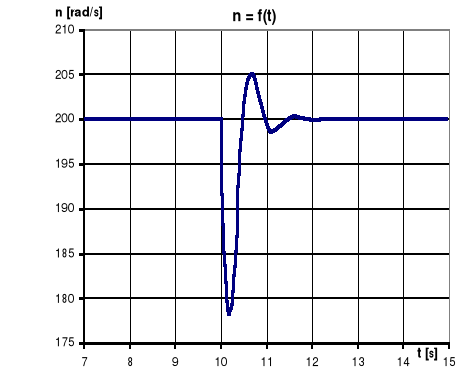
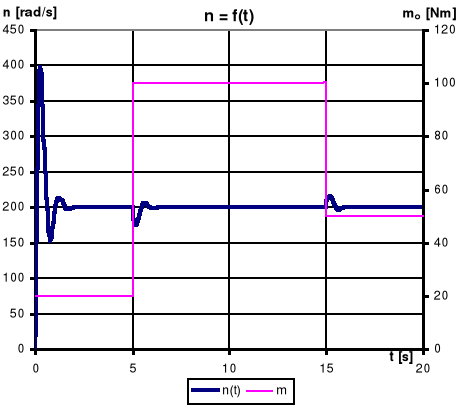
Zachowanie się silnika przy sokowych zmianach obciążenia i stałym napięciu regulacji Uo:
27
Wyszukiwarka
Podobne podstrony:
7780
7780
7780
7780
7780
7780
7780
więcej podobnych podstron