Ćwiczenie nr 7
MONITOROWANIE TRASY
SYSTEM ZOBRAZOWANIA ELEKTRONICZNEJ MAPY I INFORMACJI NAWIGACYJNEJ
ECDIS
(Electronic Chart Display and Information System)
Tematyka szkolenia
Monitorowania trasy;
Parametry bezpieczeństwa - ustawianie;
Kontrola bezpieczeństwa
Cel szkolenia
Zapoznanie się z działaniem następujących funkcji systemu:
Monitoring.
Spis treści
1. Monitorowanie trasy 2
1.1. Panel włączania wyświetlania ruchu statku i parametrów trasy 2
1.2. Panel przełączania wyświetlanego symbolu statku 3
1.3. Panel przełączania orientacji symbolu statku 3
1.4. Panel zaplanowanej trasy 4
1.5. Panel punktów zwrotu 5
1.6. Panel alarmów 6
1.7. Monitorowana trasa (Route data) 8
1.8. Żegluga według rozkładu (Schedule information) 8
2. Kontrola bezpieczeństwa monitorowanej trasy 9
2.1. Monitorowanie systemów pozycjonowania 9
2.2. Monitorowanie niebezpieczeństw nawigacyjnych 10
2.2.1. Ustawianie parametrów bezpieczeństwa dla wykrywania niebezpieczeństw 10
2.2.2. Ustawianie parametrów bezpieczeństwa w żegludze w pobliżu niebezpieczeńst 12
2.3. Monitorowanie bezpieczeństwa w czasie kotwiczenia 13
2.4. Monitorowanie przekraczania granic obszarów specjalnych 14
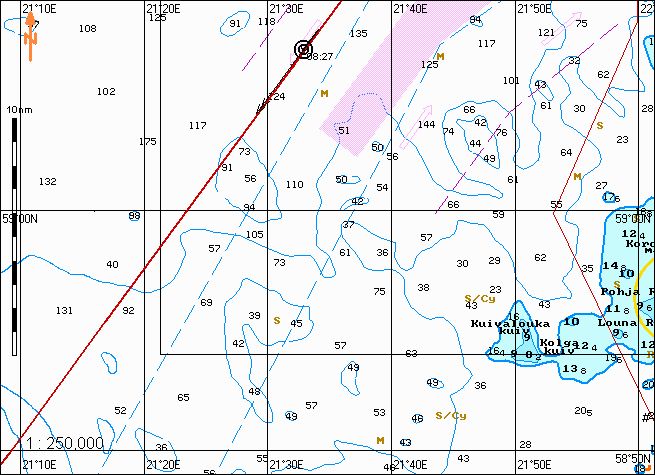
1. Route Monitoring Page (okno monitorowania zaplanowanej trasy).
Okno monitorowania trasy (Route Monitoring) dostępne jest w funkcji Task, po jej rozwinięciu i zaznaczeniu opcji wyboru. Okno służy do monitorowania żeglugi wzdłuż zaplanowanej trasu oraz według rozkładu.
Okno monitorowania przeznaczone jest do wczytywania monitorowanej trasy i planu podróży, ustawiania parametrów elementów trasy, jak również do dostosowywania alarmów generowanych podczas żeglugi po zaplanowanej trasie i zgodności z planem. Okno zawiera następujące grupy:
1.1. Group for Turning on the Display of the Ship Motion and Route Parameters (panel włączania wyświetlania parametrów ruchu statku i parametrów trasy);
1.2. Ship Symbol Display Switching Group (panel przełączania wyświetlanego symbolu statku);
1.3. Group for Switching the Own Ship Symbol Orientation (panel przełączania orientacji symbolu statku);
1.4. Route Group (panel zaplanowanej trasy);
1.5. Waypoints Group (panel punktów zwrotu);
1.6. Track Settings Group (panel ustawień toru / przebytej trasy);
1.7. Alarms Group (panel alarmów).
1.1. Panel włączania wyświetlania parametrów ruchu statku i trasy.
Panel zawiera przyciski włączania / wyłączania następujących parametrów:
Headline - linia kursu kompasowego ( / żyrokompasowego);
COG vector - wektor ruchu (nad dnem);
HDG vector - wektor ruchu po wodzie (prędkość z logu i kurs z żyro/kompasu);
XTE - błąd (przemieszczenie) poprzeczne (ustawiane podczas edycji trasy);
Arrival circle - okrąg zmiany WP;
Ustaw kursor na okienku Arrival Circle. Podwójne kliknięcie lewym przyciskiem w celu aktywowania okna.
Wstaw wartość promienia okręgu „przybycia” do WP. Lewy przycisk myszy aby zatwierdzić.
Turns - promień łuku zwrotu podczas zwrotu na następny odcinek trasy;
Ustaw kursor na okienku Turn Radius. Podwójne kliknięcie lewym przyciskiem w celu aktywowania okna.
Wstaw wartość promienia zwrotu. Lewy przycisk myszy aby zatwierdzić.
WP names - zobrazowanie na mapie nazw WP ustalanych w planie trasy.
1.2. Panel przełączania symbolu statku własnego.
Panel ten przeznaczony jest do wyświetlania (aktualnej) pozycji statku w formie konturu (kiedy aktualna skala ekranu jest proporcjonalna do wymiarów statku) lub symbolu pozycji (niezależnie od skali).
1.3. Panel przełączania orientacji symbolu statku własnego.
Panel ten jest przeznaczony do przełączania orientacji symbolu statku własnego wzdłuż wektora drogi nad dnem (COG) lub wektora ruchu statku wskazywanego przez (żyro)kompas.
Wektor ruchu używany jest do graficznej prezentacji kursu i prędkości statku. Używane są dwa wektory odpowiadające systemowi pozycjonowania.
COG - SOG (dla pozycji obserwowanej).
HDG - LOG (dla pozycji zliczonej)
Orientacja symbolu statku wzdłuż wektora drogi nad dnem.
Orientacja symbolu statku wzdłuż wektora ruchu wskazywanego przez (żyro)kompas.
1.4. Panel trasy.
Umożliwia wczytanie lub usunięcie monitorowanej trasy i rozkładu (planu) używając następujących przycisków:
Load Route - do wyboru i wczytania trasy z oferowanej listy;
W oknie Route Monitoring naciśnij przycisk Load Route.
Wybierz żądaną trasę i naciśnij lewy przycisk myszy. Wybrana trasa będzie wczytana do żeglugi w panelu mapy, a jej nazwa będzie wyświetlana na przycisku. Trasa wczytana do żeglugi będzie pokazana na czerwono.
Set Calculation - do wyboru i wczytania rozkładu / planu dla wczytanej trasy z oferowanej listy;
Naciśnij przycisk Set schedule. Wyświetli się lista rozkładów utworzonych dla danej trasy. Wybierz żądany rozkład, który będzie wczytany po naciśnięciu lewego przycisku myszy.
Unload - do usunięcia/wyładowania wcześniej wczytanej trasy i rozkładu / planu.
1.5. Punkty zwrotu.
Panel ten zawiera przyciski i okna do wstawiania wartości używanych do kalkulowania wspólnych pozycji elementów trasy i statku:
Next Waypoint - do wyboru sposobu wstawiania następnego WP dla kalkulowanych elementów ruchu po planowanej trasie;
Auto selection - do przełączania kolejnych WP w sposób automatyczny;
Manual selection - do ręcznego wstawienia numeru następnego WP.
W otwartym oknie wybierz Manual Selection i naciśnij lewy przycisk myszy. W aktywnym oknie wstaw numer następnego WP. Naciśnij lewy przycisk myszy dla zatwierdzenia.
Arrival Circle - do ustawiania promienia okręgu zmiany WP dla generowania alarmu przybycia do WP i przełączenia na następny;
Same for all WP's - do ręcznego ustawienia (promienia okręgu przybycia) dla wszystkich WP;
From Route Table - do ustawiania automatycznego z danych wstawionych w planie podróży.
Na panelu wybierz Same for all WP's i naciśnij lewy przycisk myszy. Użyj aktywnego okna do ustawienia promienia okręgu osiągnięcia WP. Naciśnij lewy przycisk myszy dla zatwierdzenia.
Turns - do ustawiania parametrów zwrotu;
Same for all WP's - do ręcznego ustawiania promienia łuku zwrotu I kąta wychylenia steru dla wszystkich WP;
W otwartym oknie wybierz Same for all WP's. Naciśnij lewy przycisk myszy. Użyj aktywnego lewego okna do wstawienia nowego promienia zwrotu i prawego okna do ustawienia kąta wychylenia steru.
Naciśnij lewy przycisk myszy dla zatwierdzenia.
Parametry zwrotu będą ustawione dla całej monitorowanej trasy.
From Route Table - do ustawiania automatycznego z danych wstawionych w planie podróży.
1.6. Panel alarmów.
Alarmy generowane podczas żeglugi po zaplanowanej trasie lub według rozkładu (ustawiane w opisanym poniżej panelu alarmów).
Alarmy generowane są w/g następujących reguł:
gdy statek zejdzie z wykreślonego kursu o wartość przekraczającą ustaloną , generowany jest alarm Course difference (szczegół 1 rysunku);
gdy odchylenie boczne od trasy przekroczy ustaloną wartość na danym odcinku trasy, generowany jest alarm Out of XTE (szczegół 2 rysunku).
gdy statek przyspieszy lub opóźni się w stosunku do rozkładu (ponad ustaloną wartość), generowany jest alarm Ahead the schedule lub Behind the schedule (szczegół 3 rysunku);
gdy statek przekroczy granicę mapy pracując w opcji chart autoload off, generowany jest alarm Off chart (szczegół 4 rysunku);
gdy statek zbliża się do następnego WP (poniżej ustalonej wartości nastawy czasowej), generowany jest alarm WP approach (szczegół 5 rysunku);
gdy statek mija ostatni WP monitorowanej trasy, generowany jest alarm End of route (szczegół 6 rysunku).
Panel alarmów przeznaczony jest do włączania/wyłączania generowania alarmów podczas żeglugi po zaplanowanej trasie i zgodności z planem oraz ustawiania parametrów bezpieczeństwa dla alarmów:
Off chart - do generowania alarmu wyjścia statku poza granice mapy, gdy wyłączona jest funkcja Chart Autoload;
Ustaw opcję Off chart dla włączenia alarmu, gdy nie ma mapy pod pozycją statku (skończyła się bieżąca mapa).
Last WP passed - alarm generowany po minięciu ostatniego WP wczytanej trasy;
Ustaw opcję Last WP passed dla włączenia generowania alarmu minięcia ostatniego punktu trasy.
Out of XTE - alarm generowany, gdy odejście (boczne) od planowanej trasy jest większe niż wartość ustalona podczas jej planowania;
Parametr śledzenia pozycji statku względem bieżącego odcinka trasy jest ustawiany domyślnie podczas jej tworzenia (może być ustawiany ręcznie przez operatora). Alarm jest generowany, kiedy statek przekroczy limit XTE.
Out of schedule - do ustawiania parametrów alarmu generowanego, gdy statek jest opóźniony lub wyprzedza rozkład;
Użyj okna Out of schedule dla ustawienia czasu wyprze- dzenia lub opóźnienia rozkładu. Zaznacz opcję dla gene-rowania alarmu, gdy ustawiona wartość jest przekroczona.
WP approach - do ustawiania okresu czasu, w którym generowany jest alarm przed przybyciem do WP;
Zaznacz opcję WP Approach dla generowania alarmu zbliżenia do WP jeżeli czas zbliżenia jest mniejszy niż ustawiony. Ustaw czas alarmu w aktywnym oknie.
Off leg course - alarm generowany, jeżeli różnica pomiędzy aktualnym KDd (COG) a kierunkiem odcinka trasy przekracza ustawioną wartość.
Użyj okna Off leg course dla ustawienia wartości różnicy pomiędzy kursem statku a kierunkiem odcinka trasy. Zaznacz opcję dla generowania alarmu, gdy różnica w/w wielkości jest przekroczona.
1.7. Route data - dane trasy.
Okno Route Data przeznaczone jest do wyświetlania danych gdy statek porusza się po wczytanej trasie do jej następnego WP.
Dostępne jest po rozwinięciu paska informacji w panelu kontrolnym i wybraniu tej opcji.
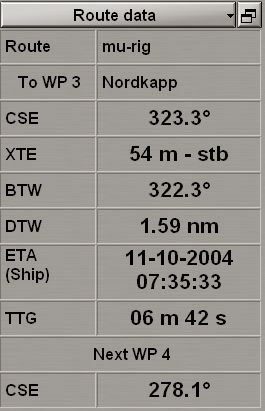
Route - nazwa monitorowanej trasy.
Kiedy wygenerowany zostanie alarm osiągnięcia ostatniego WP wyraz ”Route” będzie pokazywany kolorem czerwonym.
To WP - numer i nazwa bieżącego WP do którego statek podąża. Nazwa WP pokazywana jest w kolorze czarnym, jeżeli WP wybierany jest automatycznie lub w kolorze niebieskim, gdy WP wybierany jest ręcznie;
CSE - kierunek (kurs) bieżącego odcinka monitorowanej trasy jeżeli jest to odcinek loksodromiczny ; lub bieżący kurs w przypadku odcinka ortodromicznego. Gdy wygenerowany zostanie alarm zejścia z kursu (Off Course alarm) słowo “Course” pokazywane będzie kolorem czerwonym.;
XTE - aktualna odległość od bieżącego odcinka trasy (Cross Track Error). Gdy wygenerowany zostanie alarm Out of XTE , litery “XTE” pokazywane będą kolorem czerwonym;
BTW - namiar na bieżący WP;
DTW - odległość do bieżącegoWP;
TTG - czas pozostały do bieżącego WP, skalkulowany na podstawie bieżącej prędkości (SOG);
ETA - spodziewany czas przybycia do bieżącego WP (UTC/Ship zależy od ustawień w panelu kontrolnym); pod uwagę brana jest pozostała odległość i bieżąca szybkość (SOG);
Next WP - numer kolejnego WP;
CSE - kierunek (kurs) następnego odcinka trasy.
Schedule information.
Okno Schedule information służy do prezentacji informacji związanych z żeglugą według rozkładu.
Dostępne jest po rozwinięciu paska informacji w panelu kontrolnym i wybraniu tej opcji.
Do wyświetlania informacji konieczne jest załadowanie trasy na stronie Route Monitoring w panelu Monitoring. Elementy rozkładu, których wartości odbiegają od ustalonych na w/w stronie (Out of Schedule) pokazywane będą kolorem czerwonym.
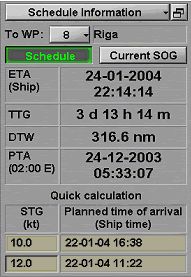
To WP - do wyboru numeru WP w celu wyświetlenia skojarzonych z nim elementów rozkładu. Linia po prawej stronie pokazuje nazwę WP jeżeli była nadana przez operatora;Schedule - do włączania wyświetlania ETA (Estimated Time of Arrival) i TTG (Time to Go) skalkulowanych zgodnie z rozkładem;
Current SOG - do włączania wyświetlania ETA i TTG skalkulowanych zgodnie z bieżącą prędkością (SOG);
ETA (Ship) - spodziewany czas przyjścia do wybranego WP skalkulowany na podstawie pozostałej odległości i ustawionej szybkości (UTC/Ship zależy od ustawień w panelu kontrolnym);
TTG - czas do osiągnięcia wybranego WP skalkulowany zgodnie z aktualnym ETA;
DTW - odległość do wybranego WP;
PTA (planned time of arrival) - planowany czas przybycia do określonego WP z rozkładu;
STG - wstawiana przez operatora szybkość do wybranego punktu dla kalkulacji PTA w linii powyżej;
W dolnej części okna znajduje się kalkulator szybkości (STG) lub planowanego czasu przybycia (PTA) do wybranego WP:
STG - wstawiana przez operatora szybkość do wybranego punktu dla kalkulacji PTA w oknie po prawej;
Planned time of arrival - wstawiony przez operatora czas przybycia do określonego punktu dla kalkulacji STG w oknie po lewej.
2. Kontrola bezpieczeństwa monitorowanej trasy.
Monitorowanie systemów pozycjonowania.
Otwórz panel Monitoring przez wybranie odpowiedniej linii w menu Task List w panelu kontrolnym.
W panelu Monitoring otwórz stronę Ship Position.
Użyj Diff. Mode lost w grupie alarmów do wstawienia czasu oczekiwania na odzyskanie sygnału GPS różnicowego.
Zaznacz aktywowaną opcję Diff. mode lost dla generowania alarmu, kiedy ustawiona wartość jest przekroczona.
W linii Prim/Sec diverged grupy alarmów wstaw rozbieżność pomiędzy współrzędnymi pierwszego i drugiego systemu pozycjonowania. Zaznacz opcję Prim/Sec diverged dla generowania alarmu, kiedy ustawiona wartość jest przekroczona.
2.2. Monitorowanie niebezpieczeństw nawigacyjnych.
2.2.1. Ustawianie parametrów bezpieczeństwa dla wykrywania niebezpieczeństw.
Otwórz panel Monitoring wybierając odpowiednią linie w menu Task List w panelu kontrolnym.
Otwórz stronę/zakładkę Navigational Alarm.
Rozwiń przycisk Check on scale larger than w grupie Safety parameters i wybierz minimalną wartość skali (mapy).
Wybrana wartość pokazywana będzie na przycisku. Wszystkie mapy o skali większej niż ustawiona będą brane pod uwagę. Domyślnie ustawiona jest skala 1:300 000.
Użyj linii Safety Contour w grupie Safety parameters do ustawienia wartości izobaty bezpieczeństwa.
Izobata bezpieczeństwa jest ustawioną wartością określającą głębokość bezpieczną. Domyślnie izobata bezpieczeństwa ustawiona jest na 30 m.
Izobata bezpieczeństwa wyróżniona jest grubą linią.
Użyj linii Safety depth w grupie Safety parameters do ustawienia wartości głębokości bezpiecznej.
Ustawiona przez operatora głębokość bezpieczna, podczas sprawdzania obszaru przez Nav.Danger Ring, służy jako kryterium klasyfikacji wykrytych głębokości jako niebezpieczeństwa nawigacyjne.
Domyślnie Safety depth ustawiona jest na 30 m. Głębokość równa lub mniejsza niż głębokość bezpieczna jest wyróżniona jest na ekranie grubą czcionką, gdy włączone jest wyświetlanie pojedynczych głębokości. Jeżeli takie niebezpieczeństwo zostanie wykryte wygenerowany zostanie alarm Nav. Danger.
2.2.2. Ustawianie parametrów bezpieczeństwa w żegludze w pobliżu niebezpieczeństw.
Otwórz panel Monitoring wybierając odpowiednią linie w menu Task List w panelu kontrolnym.
Otwórz stronę/zakładkę Navigational Alarm.
W linii Nav. Danger grupy Antigrounding Alarms wstaw promień Navigation danger ring. Zaznacz aktywowaną opcję Nav. Danger aby włączyć generowanie alarmów wykrycia niebezpieczeństwa nawigacyjnego.
Zaznacz aktywowaną opcję Add Info danger aby włączyć generowanie alarmów, gdy zidentyfikowano „updating object” z mapy użytkownika jako niebezpieczny dla nawigacji.
Użyj linii Safety Contour grupy Antigrounding Alarms aby wstawić wartość nastawy czasowej wektora bezpieczeństwa (sfety vector length). Zaznacz aktywowana opcję Safety vector dla generowania alarmów, gdy wektor przecina izobatę bezpieczeństwa.
Użyj linii Sounder Depth grupy Antigrounding Alarms aby wstawić wartość głębokości bezpiecznej z echosondy. Zaznacz aktywowaną opcję Sounder Depth dla włączenia generowania alarmów, gdy wykryta zostanie głębokość mniejsza niż ustawiona.
2.3. Monitorowanie bezpieczeństwa w czasie kotwiczenia.
Otwórz panel Monitoring wybierając odpowiednią linie w menu Task List w panelu kontrolnym.
Otwórz stronę/zakładkę Navigational Alarm.
W linii Anchor watch grupy Antigrounding Alarms wstaw wartość promienia okręgu wachty kotwicznej. Zaznacz aktywowaną opcję Anchor watch aby włączyć aktywowanie alarmów wyjścia poza okrąg wachty kotwicznej.
2.4. Monitorowanie przekraczania granic obszarów specjalnych.
Otwórz panel Monitoring wybierając odpowiednią linie w menu Task List w panelu kontrolnym.
Otwórz stronę/zakładkę Navigational Alarm.
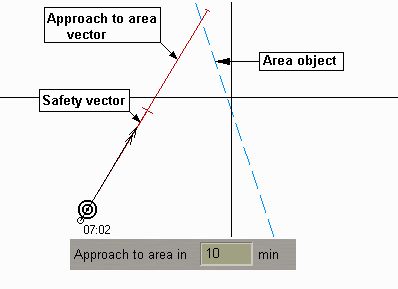
W linii Approach to area grupy Antigrounding Alarms ustaw wartość nastawy czasowej wektora Approach to area.
Jeżeli ustawione jest zero, alarm generowane są, gdy symbol statku przecina granicę obszaru (zakazanego lub wyróżnionego ze względu na panujące w nim warunki specjalne).
Wybierz żądane obszary przez zaznaczenie odpowiednich opcji wyboru w oknie Basic Areas grupy Area alarms w prawej części strony Navigational Alarm..
Wybierz żądane obszary w oknie Additional Areas przez zaznaczenie odpowiednich opcji wyboru.
1
Wyszukiwarka
Podobne podstrony:
Załącznik 1 IMO Res, Szkoła, praca na morzu, ECDIS
bezpieczna praca na tokarce, BHP, Instrukcje BHP
PEDAGOGIKA SPECJALNA CWICZENIA NR 3 i 4, Szkoła - studia UAM, Pedagogika specjalna, Konwersatorium -
i1 Praca na drabinie, BHP, Instrukcje-Jednostronicowe
Wykłady Stateczność, praca na morzu, co2013
istan Praca na drabinie, BHP, Instrukcje-Stanowiskowe
Tezy egzaminacyjne, praca na morzu, co2013
Ćwiczenia Praca na kontach lokalnych stacji bezpieczne odłaczanie i
Ćwiczenie NR 6 Odbiór komunikatów NAVTEX N, Szkoła, penek, Przedmioty, Łączność morska
InstrukcjeĆw.2009 2010, Cw.1.E-01. Badanie właściwości elektrycznych kondensatora płaskiego, Laborat
Instrukcja do ćwiczenia nr 6
cwiczenie nr 2 instrukcja id 12 Nieznany
cwiczenie nr 3 instrukcja id 12 Nieznany
Instrukcja do ćwiczenia nr 8 ver 1 0
Cwiczenie nr 13 Szablony i praca zespolowa id 9
ćw.4 zadania pH, Chemia ogólna i żywności, instrukcje do ćwiczen z chemii ogólnej i żywności na I se
cwiczenie nr 1 instrukcja
TEKSTN~1, TEKST na Ćwiczenia nr 5
więcej podobnych podstron