1. Zadania wytrzymałości materiałów Pierwszym więc niezbędnym postulatem dla każdej konstrukcji jest zapewnienie jej odpowiedniej wytrzymałości (lub jak to się często określa nośności). Wskutek działania sił konstrukcja ulega odkształceniu; jej poszczególne części zmieniają swe położenie. Zmiany te określa się przez podanie przemieszczeń liniowych poszczególnych punktów konstrukcji. Przemieszczenie liniowe definiuje się jako wektor o początku w danym punkcie ciała nie odkształconego i końcu w tymże punkcie ciała w stanie odkształconym. Oprócz przemieszczenia liniowego wprowadza się również pojęcie przemieszczenia kątowego. Przemieszczeniem kątowym nazywa się kąt zawarty między dowolnie krótkim odcinkiem związanym z rozpatrywanym ciałem przed jego odkształceniem i po odkształceniu. Zbyt wielkie przemieszczenia konstrukcji mogą uniemożliwić celowe funkcjonowanie urządzenia. Ograniczenie przemieszczeń, lub inaczej mówiąc, zapewnienie dostatecznej sztywności konstrukcji jest często warunkiem również koniecznym, jak zapewnienie jej dostatecznej wytrzymałości.Podstawowymi zadaniami badania wytrzymałości materiałów jest określenie nośności konstrukcji oraz wyznaczenie jej przemieszczeń wywołanych działającymi na nią obciążeniami. Do utrzymania konstrukcji w położeniu niezmiennym względem określonego układu odniesienia wymagane są więzy ograniczające swobodę jej ruchu. Praktycznie realizuje się te więzy w postaci stosownych podpór. Podpory działają na konstrukcję określonymi siłami zwanymi reakcjami podporowymi. Siły te można wyznaczyć wykorzystując w pierwszym rzędzie warunki równowagi. Jeżeli liczba niewiadomych sił jest równa liczbie równań równowagi, które można napisać dla danego układu, to rozpatrywany układ nazywa się układem statycznie wyznaczalnym Układ, w którym liczba n niewiadomych sił jest większa od liczby r równań równowagi nazywa się układem statycznie niewyznaczalny m lub hiperstatycznym. Układ taki określa się dodatkowo jako (n-r)-krotnie statycznie niewyznaczalny. Do rozwiązania zagadnień statycznie niewyznaczalnych konieczne jest uwzględnienie odkształceń. Jednym z zadań wytrzymałości materiałów jest rozwiązywanie zagadnień statycznie niewyznaczalnych.
Umówmy się, że w celu wyznaczenia sił wewnętrznych w pręcie rozpatruje się je w przekrojach normalnych, przyjmując za środek redukcji środek geometryczny (środek ciężkości) przekroju. Wektor główny Pw sił wewnętrznych można rozłożyć na składową N o kierunku prostopadłym do przekroju i składową T o kierunku stycznym. Moment główny MW rozkłada się również na kierunek normalny Ms i styczny Mg. Składową N nazywa się silą podłużną lub osiową, a składową T — silą poprzeczną (tnącą). Podobnie określa się Ms jako moment skręcający i Mg jako moment gnący (zginający). Składowe te nazywa się zredukowanymi siłami wewnętrznymi, lub krótko siłami wewnętrznymi. Jeżeli w pręcie wystąpi tylko jedna składowa sił wewnętrznych, to wówczas mówi się o prostym zagadnieniu wytrzymałości pręta. Do takich prostych zagadnień należą: — rozciąganie lub ściskanie — wówczas działa wyłącznie siła osiowa N i jeżeli jest zwrócona na zewnątrz rozpatrywanego przekroju, to mówi się o rozciąganiu, a jeżeli do wewnątrz, to o ściskaniu,
3. Rozciąganie i ściskanie pręta prostego o stałym przekroju. Prawo Hooke'a A. Warunki równowagi Na pręt prosty o stałym przekroju działa układ sił lub jedna siła P, która w każdym przekroju wywołuje siłę rozciągającą N — P. W przekroju normalnym występują naprężenia i zakładamy, że będą to wyłącznie naprężenia normalne sigma. Układ sił elementarnych sigma dA musi równoważyć się z siłą N. Wynika stąd warunek równowagi (Całka od A z sigma dA = N) B. Warunki geometryczne
Wydłużenie całego pręta lambda = l' - l oblicza się ze wzoru: Zmieniają się nie tylko wymiary wzdłużne rozciągniętego pręta, lecz również pierwotny wymiar poprzeczny d (np. średnica) zmienia się na d'. Zakładając, że wydłużenie w kierunku poprzecznym jest równomierne wyznacza się epsilon y = epsilon z = (d' - d)/d Wydłużenie to nazywa się wydłużeniem poprzecznym epsilon' = epsilony = epsilon z. W przypadku rozciągania d > d' a więc epsilon' < 0. C. Związki fizyczne Stosując współczesne pojęcia prawo Hookea ' można wyrazić: wydłużenie jest proporcjonalne do naprężenia, które je spowodowało (epsilon = sigma/E) Wielkość E charakteryzuje odkształcalność materiału i nazywa się modułem sprężystości wzdłużnej (modułem Younga ). Ponieważ epsilon jest wielkością niemianowaną, moduł E ma wymiar naprężenia. Prawo Hooke'a definiuje związki fizyczne między odkształceniami i naprężeniami jako liniowe. Wydłużenie poprzeczne jest również proporcjonalne do naprężenia, a stosunek epsilon'/epsilon jest liczbą stałą zależną od własności materiału (epsilon'=-v*epsilon) gdzie v — współczynnik Poissona. Dla większości materiałów 0,16 < v < 0,5. Z równania tego wynika, że dla przyjętego przez nas założenia płaskich przekrojów również sigma musi mieć w danym przekroju wartość stałą (sigma = N/A) gdzie A - pole przekroju poprzecznego. Wydłużenie całkowite pręta wyznaczamy po podstawieniach ze wzoru (lambda = P*l/A*E) gdzie A*E nazywamy sztywnością pręta. 4. Podać i zilustrować zasadę de Saint - Venanta Jeżeli na pewien niewielki obszar ciała sprężystego w równowadze działają kolejno rozmaicie rozmieszczone, ale statycznie równowarte obciążenia, to w odległości od obszaru dużo większej niż jego wymiary powstają praktycznie jednakowe stany naprężenia i odkształcenia. 5.Zasada zesztywnienia Jeżeli ciało odkształcalne pod działaniem sił zewnętrznych znajduje się w równowadze, to przy zachowaniu swego położenia, wymiarów i kształtów i pod działaniem tych samych sił, lecz po jego zesztywnieniu, nadał pozostanie w równowadze. 6. Omówić podstawowe próby doświadczalne badania materiałów.
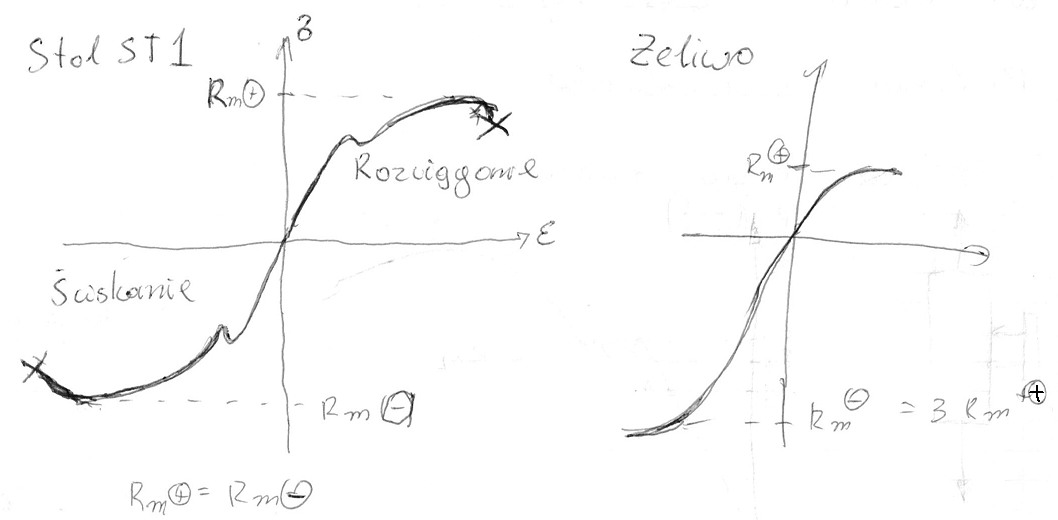
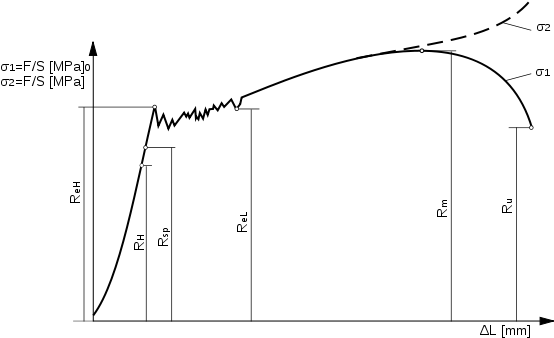
Próba udarności Podparta w sposób swobodny próbka zostaje w środkowym przekroju obciążona udarowo poruszającym się z określoną prędkością ciężkim wahadłem młota (rys. 2.17). Uderzenie następuje po stronie przeciwległej karbowi. Urządzenie badawcze, w którym realizuje się tę próbę, zwane młotem udarnościowym (Charpy'ego) umożliwia wyznaczenie pracy K (J) potrzebnej do złamania próbki. Iloraz tej pracy przez pole Su (m2) osłabionego karbem przekroju próbki zwie się udarnością i oznacza symbolem KC = K/S0 (J/m2). 7. Obliczenia wytrzymałościowe prętów na rozciąganie (ściskanie) Wzrost naprężeń i związanych z nimi odkształceń ciała powoduje zmiany w jego stanie fizycznym, które prowadzą w rezultacie do odkształceń trwałych, a nawet zniszczenia spójności materiału. Zmiany te określa się jako wytężenie materiału. Wzrost wytężenia mówi nam „o wyczerpywaniu wytrzymałości materiału". Miarą wytężenia w przypadku osiowego działania siły w pręcie jest naprężenie normalne sigma w jego przekroju. Próba rozciągania lub ściskania pozwala na wyznaczenie naprężenia niebezpiecznego sigmanieb, za które w zależności od warunków można uznać Rm, Re lub wytrzymałość na zmęczenie. W poprawnie zaprojektowanej konstrukcji wytężenie nie powinno nigdzie osiągnąć stanu niebezpiecznego. W przypadku prętów rozciąganych (ściskanych) naprężenia sigma powinny mieć wartość mniejszą niż naprężenia niebezpieczne. Tę dopuszczalną wartość naprężenia nazywa się naprężeniem dopuszczalnym (sigmadop = sigma nieb/n) gdzie n >1 jest to współczynnik bezpieczeństwa. Współczynnik ten powinien uwzględniać prawdopodobieństwo zupełnie przypadkowych odstępstw od warunków przyjętych za podstawę obliczeń. Podstawą do obliczeń wytrzymałościowych prętów jest równanie (sigma = N/A) i warunek sigma < sigmadop. Z tego równania możemy dokonywać obliczeń sprawdzających, wyznaczać obciążenia dopuszczalne lub wyznaczać wymiary przekroju.
8. Omówić problem koncentracji naprężeń. O ile dla prętów o stałym przekroju przy obciążeniu osiowym przyjęcie założenia płaskich przekrojów i w następstwie tego stałości naprężeń w przekroju okazało się słuszne, to w prętach o zmiennych przekrojach należy się liczyć z odstępstwami. Czego dowodem jest spiętrzanie się naprężeń. Szczególnie duże spiętrzenie naprężeń występuje w przypadku ostrych nacięć i mówimy wówczas o działaniu karbu.
|
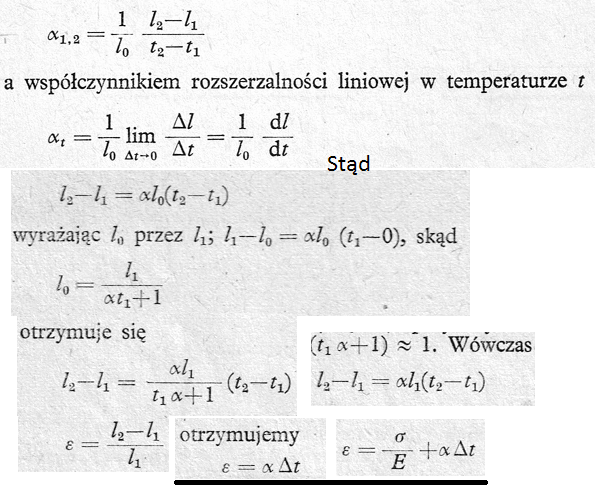
9. Wyznaczyć odkształcenia w pręcie wywołane zmiana temperatury. Przyczyną odkształcenia ciała może być oprócz działania sił również zmiana temperatury. Jeżeli ciała o długości l0 w temp 0 ogrzejemy z temp t1 do t2 długość zmieni się z l1 na l2. Wówczas średnim współczynnikiem rozszerzalności liniowej w granicach temperatur t1 i t2 jest wielkość. Zależy on głównie od rodzaju materiału, i zazwyczaj ma stała wartość.
Jeżeli prosty pręt obciążymy w płaszczyźnie prostopadłej do osi parą sił o momencie K, wówczas siły wewnętrzne w pręcie zredukują się do momentu Ms = K (o kierunku zgodnym z osią pręta) zwanego momentem skręcającym. Wprowadzając założenia płaskich przekrojów, stałej długości włókien ustalamy warunki geometryczne. W części pręta ograniczonej dwoma przekrojami I i II odległymi o dx przekrój II obraca się względem przekroju I o kat d(fi). A wraz z nim o taki sam kąt obraca się promień przekroju II. Tworzy się w ten sposób kąt gamma. Dokonując odpowiednich przekształceń otrzymujemy: 11. Wyprowadzić wzór na przemieszczenie kątowe w pręcie skręcanym
W pręcie skręcanym stan naprężenia jest ścinaniem. Nie jest on jednoosiowy lecz przedstawia się jako plaski stan naprężeń. Stan ten opisuje wartość τ = |σ 1| = |σ 2| Warunek wytrzymałościowy wyraża się: σ <=σ dop W celu wyznaczenia σ trzeba użyć jednej z hipotez wytężenia np: -hipotezą energii odkształcenia postaciowego σ = τ*√3 τ*√3 <= σdop τ<= σdop /√3 τ<=τdop τdop=0,58*σ dop 13. Czyste zginanie definicja i hipotezy def: Czyste zginanie zachodzi wówczas gdy na belkę działa wyłącznie moment gnący o stałej wartości wzdłuż osi belki. Występują naprężenia normalne a styczne nie są konieczne i można założyć, że nie wystąpią. Hipotezy: 1 Przekrój płaski pozostaje po odkształceniu pręta płaski 2 Istnieje warstwa obojętna prostopadła do płaszczyzny działania pary sił momentu gnącego 3 Wystąpią tylko naprężenia narmalne w przekroju belki, w przekrojach podłużnych brak naprężeń 15. wyprowadzić wzór na wyznaczanie naprężeń w pręcie zginanym σmax= (Mg*Ymax)/Iz = (Mg)/(Iz/ Ymax) = Mg/W W= Iz/ Ymax Mg/W= σmax<= σdop 16 Wytrzymałość na zginanie Największe naprężenia występują w najbardziej odległych od osi obojętnej punktach. Jeżeli odległość od oso]i obojętnej punktów I i II oznaczy się przez eI i eII a moment bezwładności względem osi obojętnej przez I wówczas naprężenia wynoszą σI=(Mg*eI)/I σII=(Mg*eII)/I Wytrzymałość na zginanie określają nam ilorazy momentu bezwładności przekroju względem osi obojętnej i odległości od osi włókien skrajnych. Są to wskaźniki wytrzymałości przekroju na zginanie ich wymiarem jest cm^3 17. Zginanie ukośne Zginanie nazywamy ukośnym gdy kierunek wektora momentu gnącego nie pokrywa się z kierunkiem jednej z głównych centralnych osi bezwładności przekroju. Wyznaczyć kierunek osi obojętnej tgß = (Iz/Iy)*tgα gdzie: I - momenty względem odpowiednich osi α - kąt nachylenia momentu gnącego do osi z ß- kąt nachylenia 18. Wyprowadzić wzór żurawskiego: Podczas zginania belki siłą tnącą, w dowolnym przekroju poprzecznym występuje moment gnący Mg i siła tnąca T. Można dowieść, że między momentem gnącym Mg(x), tnącą siłą T(x) oraz obciążeniem ciągłym zachodzą następujące zależności, - obciążenie ciągłe z przeciwnym znakiem jest drugą pochodną momentu gnącego w danym przekroju i tym samym pierwszą pochodną siły tnącej: - siła tnąca w danym przekroju jest pierwszą pochodną momentu gnącego w tym przekroju
20. Nie uwzględnia się wpływu sił poprzecznych, który jest pomijalnie mały, wykorzystany wzór niżej jest ograniczony do małych odkształceń (y'=tgθ =~θ (y')2<<1) 21. EI*(d2y/dx2)=Mg (oś x skierowana w prawo, y do góry, dodatni moment wygina belkę wypukłością w dół) + warunki brzegowe 22. warunki brzegowe // podpora stała (zamurowana): y(x=0)=0, y'(x=0)=0 // p. ruchoma y(x=0)=0, y' - nie ma war. // przegub - L\./P → yL=yP 23.CLEBSCH 1.Jeżeli występuje obciążenie ciągłe to przedłużamy je do końca belki, a z przeciwnej strony belki dodajemy takie obciążenie ciągłe o ile przedłużyliśmy(zrównoważenie przedłużenia).2.Piszemy jedno równanie ugięcia belki EI y= (wszystkie wyrazy wynikłe z założenia 3. Dwa razy całkujemy przestrzegając założenia 4.Ustalamy warunki początkowe i wyliczamy stałe całkowania. 24.I dy/dx=tgθ x=~ θ x (tangens kąta nachylenia stycznej do linii ugięcie przekroju belki określonego współrzędną x)(jeśli w żadnym przekroju naprężenia nie przekraczają granicy proporcjonalności, to kąty nachylenia (w radianach) są małe, więc przyjmujemy tgθ x=θ x II d2y/dx2=Mx/EI (M-moment gnąy w przekroju x, EI- sztywność zginania) III d3y/dx3=Tx/EI (T- siła tnąca) IV =-qx/Ei (q- obciążenie ciągłe) 25. Naprężenie miara sił wewnętrznych powstających w ciele pod wpływem zewnętrznej, odkształcającej siły. W danym punkcie naprężanie określone jest wektorem P=dF/dS, gdzie dF/dS oznacza siłę działającą na nieskończenie mały element powierzchni przekroju ciała. Naprężenie dzieli się na: działające w kierunku prostopadłym do powierzchni przekroju S, nazywane naprężeniem normalnym σ, oraz na działające w kierunku stycznym do powierzchni (naprężenie styczne τ), przy czym zachodzi równość P2=σ2+τ2.
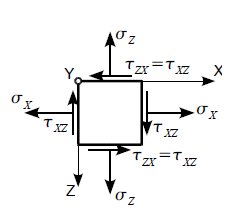
dowolny stan naprężenia opisany jest przez dziewięć składowych, które zapisujemy w formie tensora stanu naprężenia:
σ1, σ2, σ3Wyznaczanie naprężeń głównych: naprężenia normalne rozciągające się w punkcie K wyznaczamy ze wzoru: σ=(M*z)/Iy (M- moment zginający w przekroju poprzecznym belki, w którym badamy, z-odległość K od osi obojętnej, Iy - główny centralny moment bezwładności przekroju poprzecznego belki względem osi y) 26. Postulat Boltzmana Prawo równości odpowiadających sobie naprężeń stycznych prostopadłe do krawędzi przecięcia się dwu przekrojów elementarnych wzajemnie prostopadłych są zawsze równe τ yz = τ zy τ zx = τ xz τ xy = τ yx
(ε 11=ε x, ε 22=ε y, ε 12=ε 21=γ xy/2 // ε x=(A'B'*cosa-AB)/AB ε y=(A'D'cosa-AD)/AD, γ xy= α +β
27.Główne osie- to taka oś, na której momenty dewiacji są równe 0, więc nie ma naprężeń stycznych.Dla każdego stanu naprężeń można wyznaczyć 3 wzajemnie prostopadłe osie określające kier. główne 0=(σ x-σ )l+τ yxm+τ zxn 0=τ xyl+(σ y-σ)m+τ zyn 0=τ xzl+(σ z-σ)n+τ zym l2+m2+n2=1 (m,n,l - cosinusy kierunkowe) Naprężeniem głównym nazywamy wektor naprężenia σi, który jest prostopadły do płaszczyzny na którą działa. Odpowiada siłom ściskającym lub rozciągającym, a nie ścinającym — działającym wzdłuż płaszczyzny na którą działają. Naprężenia główne oznaczane są symbolami σ1, σ2, σ3.
|




Wyszukiwarka
Podobne podstrony:
opracowanie Wydymala egzamin sciaga, SiMR, SEMESTR3, Wytrzymałość materiałów I
egzamin Wytrzymałość I- Pietrzakowski zestawy pytań2, SiMR, SEMESTR3, Wytrzymałość materiałów I
zagadnienia Wytrzymałość 2015 egzamin, SiMR, SEMESTR3, Wytrzymałość materiałów I
wydymała 2a, Studia, SiMR, II ROK, III semestr, Wytrzymałość Materiałów I, Wytrzymałość
wydymała 2b, Studia, SiMR, II ROK, III semestr, Wytrzymałość Materiałów I, Wytrzymałość
test z wydymałki, Przodki IL PW Inżynieria Lądowa budownictwo Politechnika Warszawska, Semestr 4, Wy
Pytania egzaminacyjne111, Przodki IL PW Inżynieria Lądowa budownictwo Politechnika Warszawska, Semes
zadania wyd16, Przodki IL PW Inżynieria Lądowa budownictwo Politechnika Warszawska, Semestr 4, Wytrz
test 2 sciaga wersja deluxe, Automatyka i Robotyka, Semestr 3, Wytrzymałość materiałów, Ściągi
test 2 sciaga wersja mini, Automatyka i Robotyka, Semestr 3, Wytrzymałość materiałów, Ściągi
spis wy, Przodki IL PW Inżynieria Lądowa budownictwo Politechnika Warszawska, Semestr 4, Wytrzymałoś
Ogólne wzorki, Przodki IL PW Inżynieria Lądowa budownictwo Politechnika Warszawska, Semestr 4, Wytrz
Pytania egzamincyjne, semestr 4, wytrzymałość materiałów, opracowanie pytań
WYDYMAŁA16, Przodki IL PW Inżynieria Lądowa budownictwo Politechnika Warszawska, Semestr 4, Wytrzyma
Kształt, Przodki IL PW Inżynieria Lądowa budownictwo Politechnika Warszawska, Semestr 4, Wytrzymałoś
Wytrzymalosc Materialow - Sciaga(1), NAUKA, budownictwo, BUDOWNICTWO sporo, WILiS, Semestr III, Seme
WZORY1, Przodki IL PW Inżynieria Lądowa budownictwo Politechnika Warszawska, Semestr 4, Wytrzymałość
więcej podobnych podstron