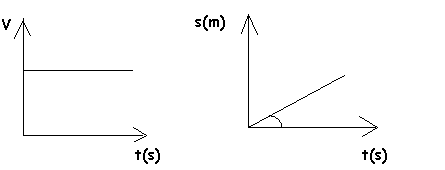
1. Zależność między drogą a czasem oraz prędkością a czasem w ruchu jednostajnym.
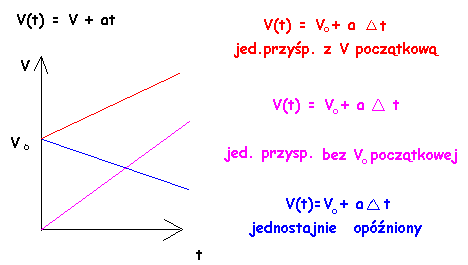
2. -równanie na prędkość w ruchu jednostajnie przyspieszonym
-zależność między prędkością a czasem w tym ruchu
3. Relacja między prędkością liniową, czasem i prędkością kątową (+przedstawienie graficzne)
Prędkością liniową ruchu po okręgu nazywamy szybkość prz4emieszczenia się ciała wzdłuż okręgu. Prędkość liniowa określona jest wzorem V=s/t
Podstawiając zamiast s długość okręgu 2Πr, a zamiast t -okres obiegu T, otrzymujemy następującą zależność:
V=2Πr /T lub V=2Πfr
Gdzie f=1/T nazywamy częstością obiegów.
Prędkością kątową ruchu jednostajnego po okręgu nazywamy stosunek kąta obrotu wektora wodzącego (skierowanego od środka okręgu do punktu, w którym znajduje się ciało) do czasu, w którym ten obrót nastąpił.
ω=α/t
Podstawiając zamiast α kąt pełny 2 Π, a zamiast t-okres T (w ciągu którego nastąpił pełen obrót), otrzymujemy
ω =2Π/T lub ω =2Πf
gdzie f=1/T. Prędkość liniowa jest więc związana z szybkością kątową następującą zależnością
v=2Πr /T = ωr, czyli v =2Πfr= ωr
4.
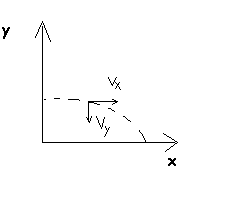
x= V0x * t
W kierunku y działa przyspieszenie ziemskie g=9,81 m/s2 w tym kierunku nie ma prędkości początkowej V0
y= - a*t2 / 2 = - g*t2 /2
x= V0x * t / : V0x
t= x/ V0x
równanie toru ruchu to parabola
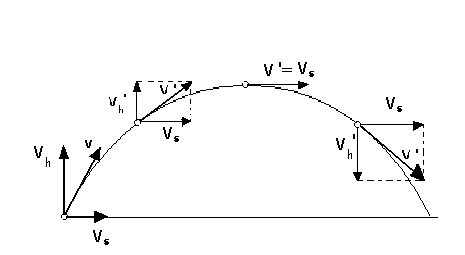
5.
Jeżeli ciało wyrzucamy w kierunku poziomym, to jednocześnie porusza sie ono w tym kierunku ( wzdłuż osi x ) oraz spada w dół ( wzdłuż osi y) pod działaniem siły ciężkości. Ponieważ siła ciężkości w każdym punkcie toru tworzy pewien kąt z wektorem prędkości, ciało porusza się wzdłuż krzywej, która w tym przypadku jest parabolą.
6.
V0x / V0 = cos Ө
V0y/V0=sinӨ
składowe V0:
V0x =V0*cosӨ
V0y= V0*sinӨ
x= (V0*cosӨ)*t
t= x/ V0*cosӨ y= V0*t sinӨ + ayt2/2
równanie toru ruchu
8. Tego nie jestem pewna !!!
I Zasada:
Sanki poruszające sie ze stałą prędkością po linii prostej, będą kontynuować ten ruch bez żadnych zmian dopóki koń nie zadziała na nie siłą, zmieniając ten stan.
II Zasada:
Przyspieszenie z jakim poruszają się sanki jest proporcjonalne do siły, którą ddziaływuje na nie koń, a odwrotność masy sanek jest współczynnikiem proporcjonalności. Kierunek i zwrot przyspieszenia jest zgodny z kierunkiem i zwrotem siły.
III Zasada:
Jeśli koń działa na sanie pewną siłą, to sanie działają na konia siłą o takim samym kierunku, wartości, lecz o przeciwnym zwrocie
9.
Konsekwencją zasady zachowania pędu jest zasada napędu rakiet, w tym także rakiet kosmicznych.
(Rakietą wraz z porcją wyrzuconego gazu traktujemy jako układ izolowany)
M-masa początkowa rakiety
Δt - po takim czasie masa M zmniejszyła się o Δm
Δm-masa wyrzuconych gazów
V-prędkość początkowa rakiety
t+ Δt - czas po wyrzuceniu gazów
V+ ΔV - prędkość po wyrzuceniu gazów (prędkość końcowa rakiety)
v-prędkość z jaką „przemieszczaja się” gazy
V+ ΔV = ?
W chwili t pęd rakiety wraz z paliwem wynosił MV
W chwili t+ Δt pęd rakiety wynosi (M- Δm)(V+ ΔV)
Pęd porcji gazów w chwili t+ Δt: Δm(V+v)
Korzystamy z prawa zachowania pędu i porównujemy pęd przed i po wyrzuceniu porcji gazów:
MV=(M- Δm)(V+ ΔV)+ Δm(V+v)
Po redukcji wyrazów podobnych przekształceniu otrzymujemy równanie:
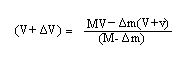
10.
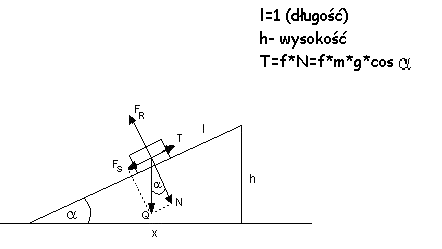
mgh=mv2/2
2gh=v2
V=√2gh
g=a
Q=m*a
N=Q*cosα
Fs=Q*sinα
T=N*f
Fw=Fs-T
11. Pracą nazywamy w mechanice iloczyn siły i przesunięcia ciała w kierunku działania tej siły W=F*s
Jeżeli kierunek przesunięcia nie jest zgodny z kierunkiem działania siły, to praca dana jest wzorem W=F*s*cos α
Iloczynem skalarnym wektorów u→ i w→ nazywamy liczbę równą iloczynowi długości obu wektorów i kosinusa kąta jaki tworzą.
u→ o w→ = |u|→ |w|→ cos α ( u→ , w→ )
Iloczyn skalarny można zinterpretować jako wartość równą iloczynowi długości jednego wektora i miary rzutu drugiego wektora na kierunek wyznaczony przez pierwszy wektor. Iloczyn skalarny jest przemienny łączny i rozdzielny względem dodawania. Z określenia iloczynu skalarnego wynika, że dwa wektory niezerowe są wtedy i tylko wtedy prostopadłe, gdy ich iloczyn skalarny jest równy zero.
12.Tarcie jest zjawiskiem, które występuje na powierzchniach styku ciał materialnych. Działanie siły tarcia obserwujemy wtedy, gdy próbujemy przesunąć względem siebie stykające się ciała-jest to siłą bierna.
Siła ta nie zależy od pola powierzchni zetknięcia się ciał; zależy jednak od materiału, z jakiego są one wykonane i od stanu ich powierzchni.
(Siła tarcia jest niezachowawcza, co oznacza, że praca wykonana przez nią lub przeciwko niej, pomiędzy dwoma ustalonymi punktami, zależy od drogi, jaką obierzemy. na równym podłożu jest równa ciężarowi, N = Q)
Jeżeli ciało na równi pozostaje w spoczynku to siła tarcia jest równa sile zsuwania. Dzięki temu za pomocą równi możemy obliczać współczynniki tarcia statycznego.
Jeżeli ciało na płaszczyźnie poziomej pozostaje w spoczynku siła tarcia równoważy siłę działającą na ciało. Maksymalna siła tarcia jest proporcjonalna do siły, z jaką ciało naciska na podłoż. Siła inicjująca ruch musi przekroczyć wartość T, aby wprawić ciało w ruch.
13.
W=F*S
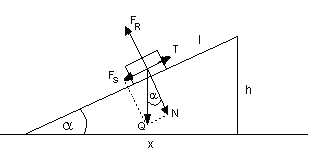
F=Ft+Fs
Ft=f.*Q*cosα
Fs=Q*sinα
Q=m*g
Stąd:
W= (f.*Q*cosα+ Q*sinα)*S
W=S*Q(f*cosα+sinα)
Ft-siła tarcia
Fs-siła zsuwu
14.
Zasada zachowania energii. Energia nie znika ani nie powstaje z niczego, lecz tylko różne jej rodzaje przekształcają sie (bez straty) w inne rodzaje energii. W mechanice zwykle rozróżniamy tylko przekształcenie energii potencjalnej w kinetyczną i na odwrót.
Podczas swobodnego spadku wysokość ciała zmniejszyła się o h. Energia potencjalna zmalała przy tym o wartość Wp=mgh, a ciało uzyskało szybkość v=√2gh. A zatem ciało uzyskało energię kinetyczną Wk=mv2/2=mgh, to znaczy o tyle wzrosła energia kinetyczna, o ile zmalała energia potencjalna. Suma energii potencjalnej i kinetycznej podczas spadku ciała jest wielkością stała:
Wp+Wk=constans
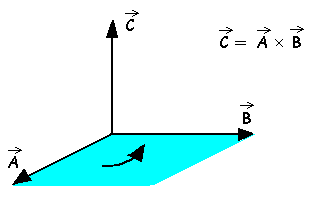
15. Iloczynem wektorowym dwóch wektorów A i B nazywamy wektor C=AxB o następujących cechach:
jest prostopadły do plaszczyzny, w której leżą wektory A i B,
ma wartość równą polu równoległoboku, rozpiętego na wektorach A i B
ma zwrot w tę stronę, w którą przesuwałaby się śruba prawoskrętna, obracana o kąt wypukły (mniejszy od półpełnego) od wektora A ku wektorowi B.
Stosujemy następujące własciwości iloczynu wektorowego:
a) w odróżnieniu od liczb, iloczyn wektorowy nie jest przemienny: B×A = - A×B, ale podobnie, jak iloczyn liczb jest rozdzielny względem dodawania:
A× (B+C)=A×B+A×C
b) iloczyn wektorowy równoległych wektorów jest równy zero.
16.
Momentem pędu poruszającego się układu nazywamy iloczyn pędu ciała razy jego ramię
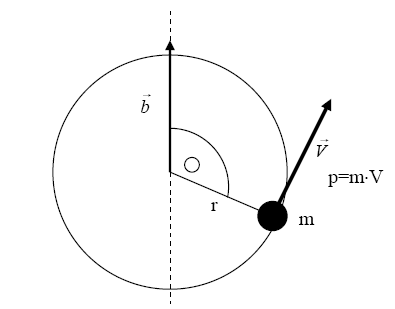
b = p ⋅ r = m⋅V ⋅ r
p=m*V
b-monemt pędu
p-pęd
r-promień
Moment pędu jest wielkością wektorową; kierunek wektora jest prostopadły do płaszczyzny obrotu, a jego zwrot określony jest regułą śruby prawoskrętnej.
Zasada zachowania momentu pędu:
Jeżeli na obracający się układ nie działają żadne zewnętrzne momenty sił to moment pędu układu pozostaje stały.
Jeżeli M= F* r to b= const
Moment siły :
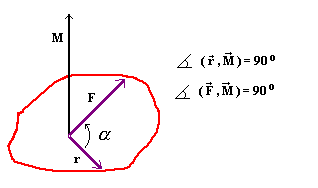
Moment M siły działającej na ciało to wielkość wektorowa określona przez iloczyn wektorowy działającej siły i promienia. Wektor momentu siły jest prostopadły do płaszczyzny wyznaczonej przez wektor siły i wektor r, a jego zwrot określa reguła śruby prawoskrętnej. Zgodnie z tą regułą, jeśli będziemy obracali po najkrótszej drodze pierwszy wektor (tu: r) tak, aby pokrył się z drugim (tu: F), to obracana w tym samym kierunku śruba prawoskrętna będzie przesuwać się (będzie wkręcana lub wykręcana) w kierunku określającym zwrot wektora M.
17. Spróbuje znaleźć jakąś inną zależność, ale póki co mam tyle:
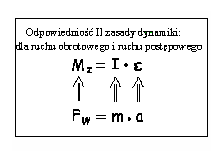
Korzystając ze związku miedzy prędkością kątową ω, a przyśpieszeniem kątowym ε, drugą zasadą dynamiki dla ruchu obrotowego wokół ustalonej osi możemy zapisać w postaci wyrażenia
ω-prędkość kątowa
ε-przyśpieszenie kątowe
I-moment bezwładności
J- całkowity moment pędu bryły
Mz- siła wypadkowa
Z powyższego wzoru możemy wyciągnąć wniosek:
Jeżeli całkowity moment sił względem osi obrotu, działający na bryłę jest równy zero, to jej moment pędu względem tej osi jest stały.
18.
wektor wiodący - wektor zaczepiony w początku układu współrzędnych i o końcu w punkcie A, czyli w tym wypadku w środku masy (środek masy ciała lub układu ciał jest punktem, w którym skupiona jest cała masa w opisie układu jako masy punktowej)
Wektor wodzący jest wektorem położenia ciała względem początku układu.
→ →
ro= Σkmkrk / Σkmk
19. Ruch harmoniczny /drgający/
Każdy ruch, w którym w pewnych warunkach siła jest w przybliżeniu proporcjonalna do wychylenia od stanu równowagi, jest ruchem harmonicznym.
Ruchy harmoniczne dzielimy na:
-nie tłumiony (bez sił oporu-idealny)
-tłumiony (siła zewnętrzna zostaje odjęta, a drgania zanikają w funkcji czasu)
-tłumiony z siłą wymuszająca (siła stale pobudza do drgań)
Siła wymuszająca (F=-kx) proporcjonalna do wychylenia i o przeciwnym znaku niz wychylenie.
(zagadnienie obejmuje cały wykład o ruchu harmonicznym)
Wyszukiwarka
Podobne podstrony:
2LAB, 1 STUDIA - Informatyka Politechnika Koszalińska, Labki, Fizyka, sprawka od Mateusza, Fizyka -
WYKRES73, 1 STUDIA - Informatyka Politechnika Koszalińska, Labki, fizyka1, fiza, fizyka
C7, 1 STUDIA - Informatyka Politechnika Koszalińska, Labki, Fizyka, sprawka od Mateusza, Fizyka - la
Fizzad2, 1 STUDIA - Informatyka Politechnika Koszalińska, Labki, fizyka1, fiza, fizyka
STOS-EM, 1 STUDIA - Informatyka Politechnika Koszalińska, Labki, fizyka1, fiza, fizyka
Fizyka21, 1 STUDIA - Informatyka Politechnika Koszalińska, Labki, fizyka1, fiza, fizyka
FizWyks2, 1 STUDIA - Informatyka Politechnika Koszalińska, Labki, fizyka1, fiza, fizyka
065S~1, 1 STUDIA - Informatyka Politechnika Koszalińska, Labki, fizyka1, fiza, fizyka
FizPrad, 1 STUDIA - Informatyka Politechnika Koszalińska, Labki, fizyka1, fiza, fizyka
051C~1, 1 STUDIA - Informatyka Politechnika Koszalińska, Labki, fizyka1, fiza, fizyka
SUCHY73, 1 STUDIA - Informatyka Politechnika Koszalińska, Labki, fizyka1, fiza, fizyka
062C~1, 1 STUDIA - Informatyka Politechnika Koszalińska, Labki, fizyka1, fiza, fizyka
C 47, 1 STUDIA - Informatyka Politechnika Koszalińska, Labki, Fizyka, sprawka od Mateusza, Fizyka -
065A~1, 1 STUDIA - Informatyka Politechnika Koszalińska, Labki, fizyka1, fiza, fizyka
LAB9, 1 STUDIA - Informatyka Politechnika Koszalińska, Labki, fizyka1, fiza, fizyka
więcej podobnych podstron