5. RACHUNEK WEKTOROWY
5.1. Wektor zaczepiony i wektor swobodny
Uporządkowaną parę punktów (A, B), wyznaczającą skierowany odcinek o początku w punkcie A i końcu w punkcie B, nazywamy wektorem zaczepionym w punkcie A i oznaczamy symbolem |
Wektory ![]()
to nie te same wektory chociaż AB i BA to ten sam odcinek.
Współrzędne wektora zaczepionego ![]()
definiujemy następująco:
|
Gdy punktem początkowym wektora zaczepionego jest O (0; 0; 0), to współrzędne wektora ![]()
są identyczne ze współrzędnymi punktu B.
Przykład: Wyznaczyć współrzędne wektora zaczepionego w punkcie A(2; -1; 3) o końcu w punkcie B(4; 5; -1)
Rozwiązanie:
Otrzymujemy ![]()
= [4 - 2; 5 - (-1); -1 - 3] = [2; 6; -4].
Po dokonaniu odejmowań pozostają jako współrzędne wektora trzy liczby. Sytuacja, w której znamy tylko współrzędne wektora, nie opisuje zatem wektora zaczepionego.
Przykład: Dane są punkty A (0; 0; 0), B (1; 2; -1), C (1; 1; 1) i D (2; 3; 0). Obliczyć współrzędne wektorów zaczepionych ![]()
.
Rozwiązanie:
![]()
= [1 - 0; 2 - 0; -1 - 0] = [1; 2; -1];
![]()
= [2 - 1; 3 - 1; 0 - 1] = [1; 2; -1].
Wektory ![]()
mają więc takie same współrzędne.
Wektor swobodny jest to zbiór nieskończenie wielu wektorów zaczepionych o takich samych współrzędnych (reprezentantów danego wektora swobodnego). |
W dalszych rozważaniach zarówno wektory zaczepione jak i swobodne będziemy krótko nazywać wektorami.
5.2. Współrzędne kartezjańskie wektora
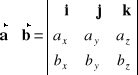
Współrzędnymi kartezjańskimi prostokątnymi wektora ![]()
w przyjętym układzie współrzędnych OXYZ, oznaczanymi przez ax , ay , az , nazywamy współrzędne tego wektora na kolejnych osiach układu, utworzone przez umieszczenie początku wektora ![]()
w początku układu współrzędnych.
Rzutując zaczepiony w początku układu współrzędnych wektor, będący reprezentantem wektora swobodnego ![]()
, na osie układu współrzędnych, otrzymujemy wzory:
ax = a cos α , ay = a cos β , az = a cos γ ,
gdzie α , β , γ są to kąty, jakie tworzy wektor ![]()
z osiami OX, OY, OZ. Liczba a we wzorach (6.2) to długość wektora ![]()
. Współrzędne wektora ![]()
można więc zapisać w postaci
![]()
= [ax ; ay ; az] = [a cos α ; a cos β ; a cos γ]
Przykład: Dane są kąty kierunkowe wektora ![]()
o długości a =5: α =π/6, β = π/3, λ = π/2. Obliczyć współrzędne wektora ![]()
.
Rozwiązanie:
ax = a cos α = 5 ⋅ cos π/6 = 5 ⋅ cos 30° = 5 ⋅ ![]()
= 4,33
ay = a cos β = 5 ⋅ cos π/3 = 5 ⋅ cos 60° = 5 ⋅ 0,5 = 2,50
az = a cos γ = 5 ⋅ cos π/2 = 5 ⋅ cos 90° = 5 ⋅ 0 = 0
5.3. Długość wektora. Wersory
Jeśli ![]()
= [ax ; ay ; az], to długość wektora ![]()
, oznaczaną ![]()
lub a (bez strzałki), obliczamy ze wzoru
|
Długość wektora ![]()
oznaczamy ![]()
lub po prostu AB
![]()
Przykład: Obliczyć długość wektora o początku w punkcie
A (2; -1; 3) i końcu w punkcie B (4; 2; -1).
Rozwiązanie:
![]()
= (4 - 2)2 + (2 - (-1))2 + (-1 -3)2 = 4 + 9 + 16 = 29
Stąd
![]()
= AB = ![]()
5,385
Wektory o długości równej 1 (wektory jednostkowe), nazywamy wersorami.
Dla każdego wektora (oprócz wektora zerowego) można zbudować odpowiadający mu wersor. Jeżeli ![]()
= [ax ; ay ; az] , to wektor o współrzędnych równych 
ma długość 1. Stąd dla kosinusów kierunkowych wektora mamy związek:
cos2 α + cos2 β + cos2 γ = 1 |
Dwa wektory, ![]()
, są zgodnie równoległe, gdy współrzędne jednego z tych wektorów można otrzymać ze współrzędnych drugiego, mnożąc je przez liczbę dodatnią. Gdy ta liczba musi być ujemna - mamy wektory przeciwnie równoległe
Wersorem niezerowego wektora ![]()
= [ax , ay , az], oznaczonym ![]()
, nazywamy wektor
= [ cos α, cos β, cos γ ]
Szczególnymi wersorami są wersory osi układu współrzędnych.
.
5.4. Działania na wektorach
Wprowadzimy następujące działania na wektorach:
- dodawanie wektorów (wynik jest wektorem),
- mnożenie wektora przez liczbę(wynik jest wektorem),
- mnożenie skalarne wektorów (wynik jest skalarem, tzn. liczbą),
- mnożenie wektorowe wektorów (tylko w R3; wynik jest wektorem).
Sumą wektorów
|
Przykład:
Obliczyć sumę wektorów:
![]()
= [3; -2; 5] , ![]()
= [-1; 4; -7] , ![]()
= [-4; -1; 2]
Rozwiązanie:
![]()
= [3 - 1 - 4; -2 + 4 -1; 5 - 7 + 2] = [-2; 1; 0]
Iloczynem różnej od zera liczby λ ∈R i niezerowego wektora |
Jest to wektor o długości ![]()
, zgodnie równoległy z wektorem ![]()
, gdy λ > 0, a przeciwnie równoległy, gdy λ < 0.
Suma iloczynów wektorów i liczb nosi nazwę kombinacji liniowej wektorów i jest - oczywiście - wektorem:
![]()
,
i = 1,2, . . . ,n.
Dwa liniowo zależne wektory ![]()
(dla których istnieje równa wektorowi zerowemu kombinacja liniowa o współczynnikach różnych od zera, tzn. istnieją λ1 i λ2 takie, że ![]()
) nazywamy współliniowymi.
Przykład:
Wektory ![]()
= [4; -6; 5] i ![]()
= [-2; 3; -2,5] są liniowo zależne, gdyż ![]()
. Można stąd wyliczyć, że ![]()
- czyli są one zgodnie równoległe. Ponieważ są to wektory swobodne, więc można wybrać reprezentanta każdego z nich, zaczepionego np. w punkcie O (0; 0; 0). Wówczas wektory te leżą „jeden na drugim”, przy czym wektor ![]()
jest dwa razy dłuższy od wektora ![]()
.
Iloczynem skalarnym dwóch niezerowych wektorów
|
Iloczyn skalarny niezerowego wektora przez siebie daje wynik równy kwadratowi długości tego wektora:
![]()
= axax + ayay + azaz = a2 czyli ![]()
Tabliczka mnożenia skalarnego wersorów osi:
|
i |
j |
k |
i |
1 |
0 |
0 |
j |
0 |
1 |
0 |
k |
0 |
0 |
1 |
Przykład:
Obliczyć iloczyn skalarny wektorów ![]()
= [2; 3; -1] i ![]()
= [-1; 3; 2].
Rozwiązanie:
![]()
= 2⋅ (-1) + 3 ⋅ 3 + (-1) ⋅ 2 = -2 + 9 - 2 = 5
Kątem niezerowych wektorów |
Wprowadzimy teraz wzór na kosinus kąta pomiędzy wektorami ![]()
. Z rysunku widać, że ![]()
, skąd ![]()
, albo ![]()
, skąd mamy
c2 = a2 - ![]()
+ b2
Z tw. kosinusów mamy:
c2 = a2 + b2 - 2ab cos ![]()
Stąd ![]()
= 2ab cos ![]()
lub
![]()
Warunek prostopadłości niezerowych wektorów:
|
W przypadku wektorów w przestrzeni wektorowej n-wymiarowej, mówimy o ortogonalności: dwa niezerowe wektory są ortogonalne, gdy ich iloczyn skalarny jest równy zero.
Iloczynem wektorowym wektorów ![]()
w trójwymiarowej przestrzeni wektorowej, oznaczanym ![]()
, nazywamy trzeci wektor, ![]()
, mający następujące cechy:
1. ![]()
2. ![]()
3. trójka wektorów ![]()
, zaczepionych w tym samym punkcie, jest ustawiona w takiej samej kolejności, jak wersory osi i, j, k (wektory ![]()
tworzą - analogicznie jak wersory osi - tak zwaną prawoskrętną trójkę wektorów).
Dla wersorów osi:
j × i = -k
k × j = -i
i × k = -j
Tabliczka mnożenia wektorowego
Ⴔ |
i |
j |
k |
i |
|
k |
-j |
j |
-k |
|
i |
k |
j |
-i |
|
Własności iloczynu wektorowego.
Własności iloczynu wektorowego:
1.
2.
3.
|
Przykład
Obliczyć iloczyn wektorowy wektorów ![]()
= [2; 3; -1] i ![]()
= [-1; 3; 2].
Rozwiązanie:
Mamy ![]()
= 2i + 3j - k oraz ![]()
= -i + 3j +2k

przekształcimy to wyrażenie do postaci następującej:
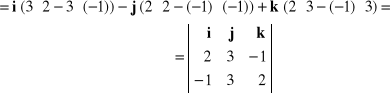
Stąd
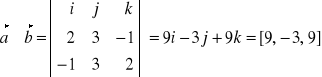
Uogólniając, dla wektorów ![]()
= [ax ; ay ; az] i ![]()
= [bx ; by ; bz]:
|
PAMIĘTAJMY:
Przykład:
Obliczyć iloczyn wektorowy wektorów
![]()
= [2; 3; -1] i ![]()
= [-4; -6; 2].
Rozwiązanie:

Wektory ![]()
i ![]()
są równoległe.
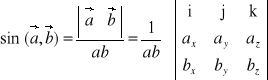
Wzór na sin kąta między wektorami:
5.5. Rachunek wektorowy - podsumowanie
Wprowadziliśmy dwa podstawowe rodzaje wektorów: wektor zaczepiony i wektor swobodny.
Dla każdego wektora określone zostały:
długość (nazywana także modułem) - tak samo jak długość odcinka,
kierunek - od punktu początkowego do końcowego, a także
zwrot - czyli zgodna lub przeciwna równoległość w stosunku do drugiego wektora lub równoległej osi.
Położenie każdego wektora względem osi układu współrzędnych można określić przy pomocy kątów kierunkowych lub kosinusów kierunkowych.
Wektor o długości jednostkowej otrzymał nazwę „wersor”.
Wersory osi układu współrzędnych oznaczone zostały literami i, j, k. Tworzą one bazę przestrzeni wektorowej trójwymiarowej.
Wprowadzone zostały działania na wektorach:
- dodawanie wektorów (wynik jest wektorem), zapisywane: ![]()
;
- mnożenie wektora przez liczbę (wynik jest wektorem), zapisywane bez żadnego znaku między liczbą a wektorem: ![]()
R ;
- mnożenie skalarne wektorów (wynik jest skalarem, tzn. liczbą), zapisywane z użyciem kropki: ![]()
;
- mnożenie wektorowe wektorów (tylko w R3 ; wynik jest wektorem), zapisywane z użyciem krzyżyka: ![]()
.
Określone zostały warunki
- prostopadłości (ortogonalności) wektorów - z wykorzystaniem iloczynu skalarnego
- równoległości wektorów - z wykorzystaniem iloczynu wektorowego;
- współliniowości dwóch wektorów (znikanie ich kombinacji liniowej).
Wprowadzono wzory na kosinus kąta między wektorami ( z wykorzystaniem iloczynu skalarnego) i na sinus kąta między wektorami (z wykorzystaniem modułu iloczynu wektorowego).
5.6. Zadania
Dane są punkty A = (1; 1; 3) , B = (0; -1; 4) i C = (3; -5; 0). Wyznaczyć wektory

Dany jest punkt A = (1; -2; 3). Wyznaczyć punkt B, wiedząc, że a)

= [3; 5; -4] , b)
= [0; 2; 0] , c)
= [-1; 2; -3].Dane są wektory:

= [1; 3; 4] ,
= [-3; 0; 1] ,
= [1; 3; 3] oraz
= [-1; -3; -2]. Wyznaczyć wektor
.Dwa wektory,

, mają wspólny początek A ( 1, 2, 0), tę samą długość h = 2 i tworzą kąt
a) Narysować te wektory oraz ich sumę i różnicę. b) Narysować kilka wektorów - reprezentantów wektora swobodnego
, którego reprezentantem jest wektor
. c) Obliczyć moduł sumy i moduł różnicy wektorów
Dany jest równoległobok o bokach AB, BC, CD, DA. Wyrazić wektory

przez wektory
.Wektory
są sąsiednimi bokami sześciokąta foremnego ABCDEF. Wyrazić wektory
za pomocą wektorów
.Wektory

o długościach u = 1, v = 2, tworzą kąt ϕ = 60°. Obliczyć
.Wektory

mają moduły u = 4, v = 2, w = 6 i każde dwa z tych wektorów tworzą kąt równy π/3. Obliczyć: a)
b)
c)
Dane są trzy liniowo niezależne wektory

. Zbadać liniową zależność wektorów.
Mając dane wersory

tworzące kąt 45°, utworzono wektory
i zbudowano na tych wektorach równoległobok. Obliczyć długości przekątnych tego równoległoboku.Wyznacz długość wektora

, jego rzuty na osie układu współrzędnych, kąty, jakie tworzy z osiami współrzędnych dla następujących danych: a) A (-1; 0; 3) , B (-2; 5; 0) b) A (0; 3; -4) , B (4; 0; -3) c) A (1; 2; -3) , B (-2; -4; 6)Obliczyć wersory wektorów

z zadania 3.Obliczyć iloczyn skalarny wektorów

, wiedząc, że a) a =
, b = 3 ,
= π/3 b) a = 2 , b = 5 ,
= 0° c) a = 2 , b = 5 ,
= 120° d) a = 1 , b = 5 ,
= π/2 Obliczyć kąt
wiedząc, że a) a =
, b = 5 ,
= 5 b) a = 2 , b = 3 ,
= 6 c) a = 2 , b = 3 ,
= 0 d) a = 2 , b = 3 ,
= -6Dane są punkty A = (0; -1; 3) , B (6; 5; -2) , C = (1; -2; 3). Wykazać, że

.Dla jakich wartości parametru m a) wektory [m2 + 1; m; 1] i [10; 4; m] są równoległe? b) wektory [m2; -3; 0] i [m; m; m +2] są prostopadłe?
Zbadać, czy dwa poniższe wektory są równoległe lub prostopadłe. W przypadku równoległości wyrazić jeden z nich przez drugi: a)

= [1; 3; 4] ,
= [-3; 0; 1] b)
= [1; 5; 0] ,
= [2; 10; 1] c)
= [1; 1; 1] ,
= [-1; 1; 0]Dane są cztery wektory. Wyrazić jeden z nich jako kombinację liniową pozostałych: a)

= [1; 3; 4] ,
= [-3; 0; 1] ,
= [1; 3; 3] ,
= [-1; -3; -2] b)
= [1; 2; 1] ,
= [-1; 0; 1] ,
= [3; 0; 0] ,
= [0; 1; -2] c)
= [6; 0; 1] ,
= [1; 1; 2] ,
= [-1; 0; 1] ,
= [0; 0; 1] d)
= [3; 0; 1] ,
= [1; 4; -2] ,
= [5; 8; -3] ,
= [2; -4; 3]Wyznacz wektory prostopadłe do danych dwóch wektorów: a)

= [1; 3; 4] ,
= [-3; 0; 1] b)
= [1; 5; 0] ,
= [2; 10; 1] c)
= [1; 1; 1] ,
= [-1; 1; 0] d)
= [2; -3; 1] ,
= -4; 6; -2]Wektor tworzy z osiami OX i OY kąty π/3 i π/4. Obliczyć kąt, który ten wektor tworzy z osią OZ.
Zbadać, czy oś o kosinusach kierunkowych 1/2, 1/2,

jest prostopadła do osi o kosinusach kierunkowych 0,
Oś p ma kosinusy kierunkowe 1/3, -2/3, 2/3. Obliczyć kosinusy kierunkowe osi s, wiedząc, że
.Udowodnić, że delta Kroneckera, może być zdefiniowana w trójwymiarowej przestrzeni wektorowej przy wykorzystaniu iloczynu skalarnego wektorów bazy, jeżeli osie układu współrzędnych nazwiemy OX = OX1 , OY = OX2 , OZ = OX3, a wersory osi: i = e1 , j = e2 , k = e3. Rozszerzyć rozumowanie na przestrzeń n-wymiarową.
4.14
B
![]()
A •
Z
az
![]()
O ay
Y
ax
![]()
α
O ax X
oś OZ
wersor osi OX: i = [1; 0; 0] k
wersor osi OY: j = [0; 1; 0] j
wersor osi OZ: k = [0; 0; 1] i oś OY
oś OX
Rys. 6.5.
Wersory osi prostokątnego układu współrzędnych.
![]()
![]()
![]()
![]()
k
j
![]()
i
![]()
![]()
![]()
![]()
![]()
![]()
j -k
i lub po obróceniu
-k o kąt 180 ° i
j
k j
-i lub po obróceniu -i
o kąt 90°
j k
k
-j
i
![]()
← współrzędne wektora ![]()
← współrzędne wektora ![]()
a) Zapis:
![]()
![]()
![]()
![]()
b) Zapis:
![]()
![]()
![]()
![]()
Wyszukiwarka
Podobne podstrony:
wektor, BUDOWNICTWO, Semestr 1, Mechanika ogólna
Egz mech 2(1), Studia, SiMR, II ROK, III semestr, Mechanika Ogólna II, Mechanika 2, Mechanika
maszyny proste, Technik BHP, CKU Technik BHP, CKU, Notatki szkoła CKU (BHP), Podstawy mechaniki, Mec
Mechanika ogolna Zadanie 1 id 291085
Teoria+z+mechaniki+1, Inżynieria Środowiska-Szczecin, Mechanika ogólna i wytrzymałość materiałów
Mechanika ogólna Reakcje podpór
Mechanika ogólna2, STUDIA, Polibuda - semestr I, Mechanika ogólna
Ściąga Z Mechaniki, Studia - Budownictwo, Mechanika ogólna
wycena domu p. Skórka, PK, mechanika, mechanika ogólna
W7-dynamika bryly sztywnej, Studia, SiMR, II ROK, III semestr, Mechanika Ogólna II, Mechanika 2, 3 k
MachBarwi2, Politechnika, Sprawozdania, projekty, wyklady, Mechanika Ogolna
Mechanika ogólna 2 teoria na egzam
Lista zadań Mechanika Ogólna
WYKŁAD Mechanika Ogólna Część IV
więcej podobnych podstron