068 069

68 Eliza Mytych. Ludwik Kamański
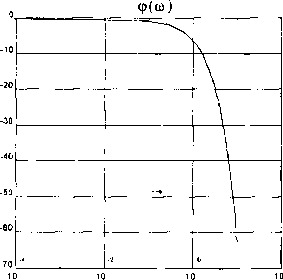
Rys. 3.26. Charakterystyka logarytmiczna fazowa
gdzie:
k ~ współczynnik proporcjonalności. co0 - pulsacja oscylacji własnych elementu,
Ż - zredukowany (względny) współczynnik tłumienia, T - stała czasowa.
Literatura:
1. PEŁCZEWSKI W. Teoria sterowania. Warszawa. WNT 1980
2. ŻELAZNY M. Podstawy automatyki. Warszawa. PWN 1976
Rozdział 4
STABILNOŚĆ UKŁADÓW LINIOWYCH
4.1. Wprowadzenie - określenia podstawowe
Podstawowym wymogiem stawianym układom regulacji automatycznej jest zachowanie stabilności. Układ regulacji uważa się za stabilny wtedy, gdy wielkość wyjściowa, jako odpowiedź na dowolne ograniczone wymuszenie, będzie ograniczona.
Stabilność jest cechą układu, polegającą na powracaniu do stanu równowagi stałej po ustaniu zakłócenia, które wytrąciło układ z tego stanu.
Zamknięty układ liniowy będziemy uważać za stabilny, jeśli przy każdej skończonej wartości zakłócenia z(t) i wartości zadanej w(7) oraz dla dowolnych warunków początkowych sygnał wyjściowy y{t) dążyć będzie do skończonej wartości ustalonej dla czasu t dążącego do nieskończoności.
Gdy po zaniknięciu zakłócenia, które wytrąciło układ ze stanu równowagi, układ wraca do tego samego położenia równowagi, z którego został wytrącony, wówczas mówimy o stabilności asymptotycznej.
Natomiast gdy równanie charakterystyczne ma jeden pierwiastek zerowy, to układ jest stabilny nieasymptotycznie, tzn. że po wytrąceniu układu z położenia równowagi i ustaniu zakłóceń osiąga inny stan równowagi niż ten, z którego został wytrącony.
Wyszukiwarka
Podobne podstrony:
068 069 68 Eliza Mytych. Ludwik Kumański Rys. 3.26. Charakterystyka logarytmiczna fazowa gdzie: k ~
064 065 64 Eliza Mytych, Ludwik Kamański Rys. 3.18. Charakterystyka amplitudowo-fazowa Lm(co) Rys 3.
062 063 62 Eliza Mytych. Ludwik Kumański Rys. 3.14. Charakterystyka logarytmiczna fazowa4. Elementy
062 063 62 Eliza Mytych. Ludwik Kumańskicp(to) Rys. 3.14. Charakterystyka logarytmiczna fazowa4. Ele
060 061 60 Eliza Mytych, Ludwik- KumańskiLm(co) Rys. 3.10. Charakterystyka logarytmiczna amplitudowa
066 067 66 Eliza Mytych. Ludwik KumańskiLm(co) Rys. 3.22. Charakterystyka logarytmiczna amplitudowa
068 069 2 68 Programowanie liniowe Z powyższych warunków wynikają następujące wnioski:Warunek (1-14)
052 053 52 Eliza Mytych. Ludwik Kumański Rozdział 3. Charakterystyki czasowe i częstotliwościowe53 O
056 057 56 Eliza Mytych, Ludwik Kumański Charakterystyka logarytmiczna amplitudowa Lm(co) przedstawi
058 059 58 Eliza Mytych, Ludwik KumańskiQ(P) 15,-;----------- .—.- 10 5 O -5 -10 -15
056 057 56 Eliza Mytych, Ludwik Kumański Charakterystyka logarytmiczna amplitudowa Lm{a>) przeds
więcej podobnych podstron