a007
— 7 —
— 7 —
UNITRRjTiTi
DIORA L=i
ZASADA DZIAŁANIA KWADROFONICZNEGO SYSTEMU SQ
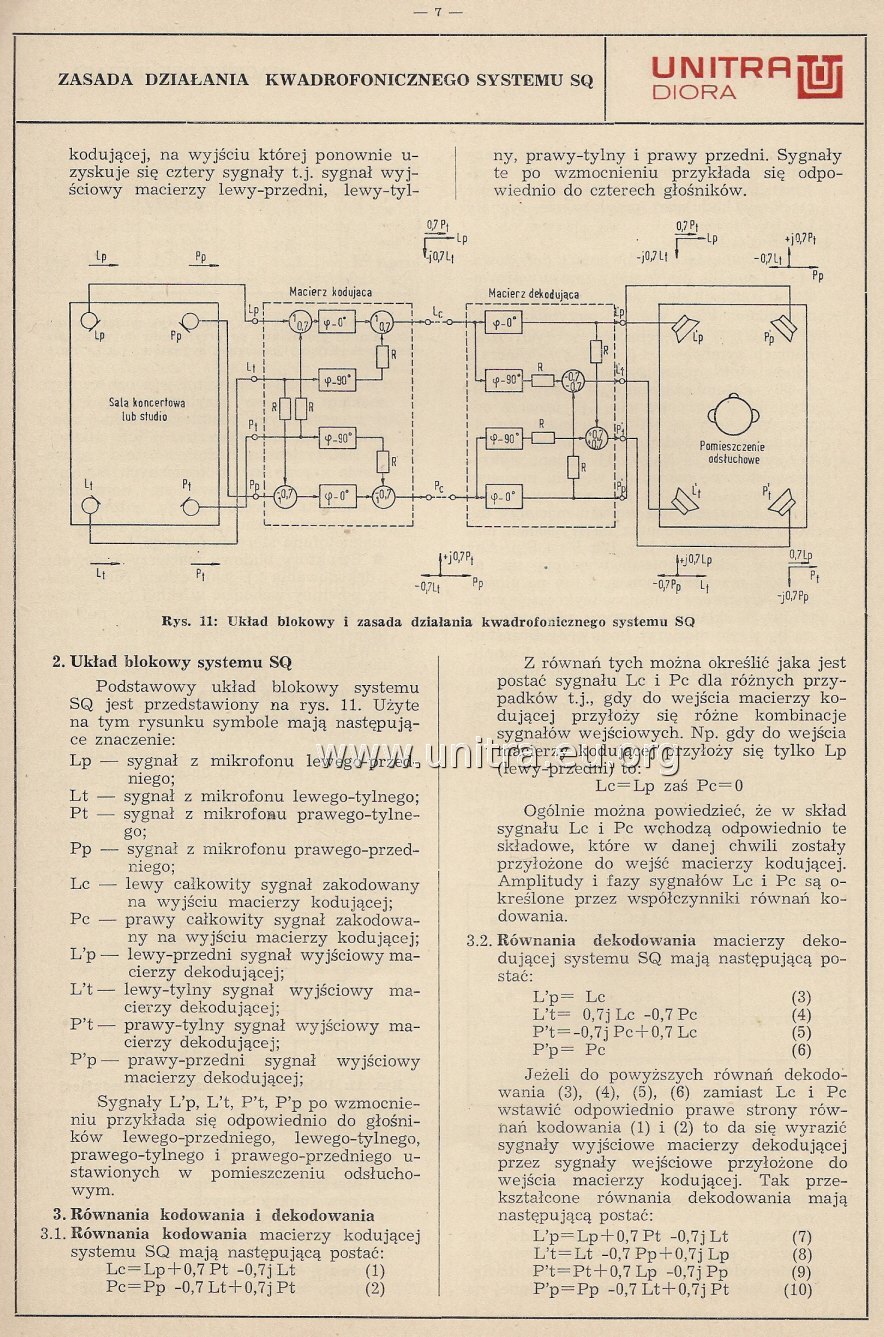
kodującej, na wyjściu której ponownie u-zyskuje się cztery sygnały t.j. sygnał wyjściowy macierzy lewy-przedni, lewy-tyl-ny, prawy-tylny i prawy przedni. Sygnały te po wzmocnieniu przykłada się odpowiednio do czterech głośników.
o;Pi
Lp
Pp
o;pi
f—Lp
WŁ,
tp
►jO,7Pt
-0,7l|
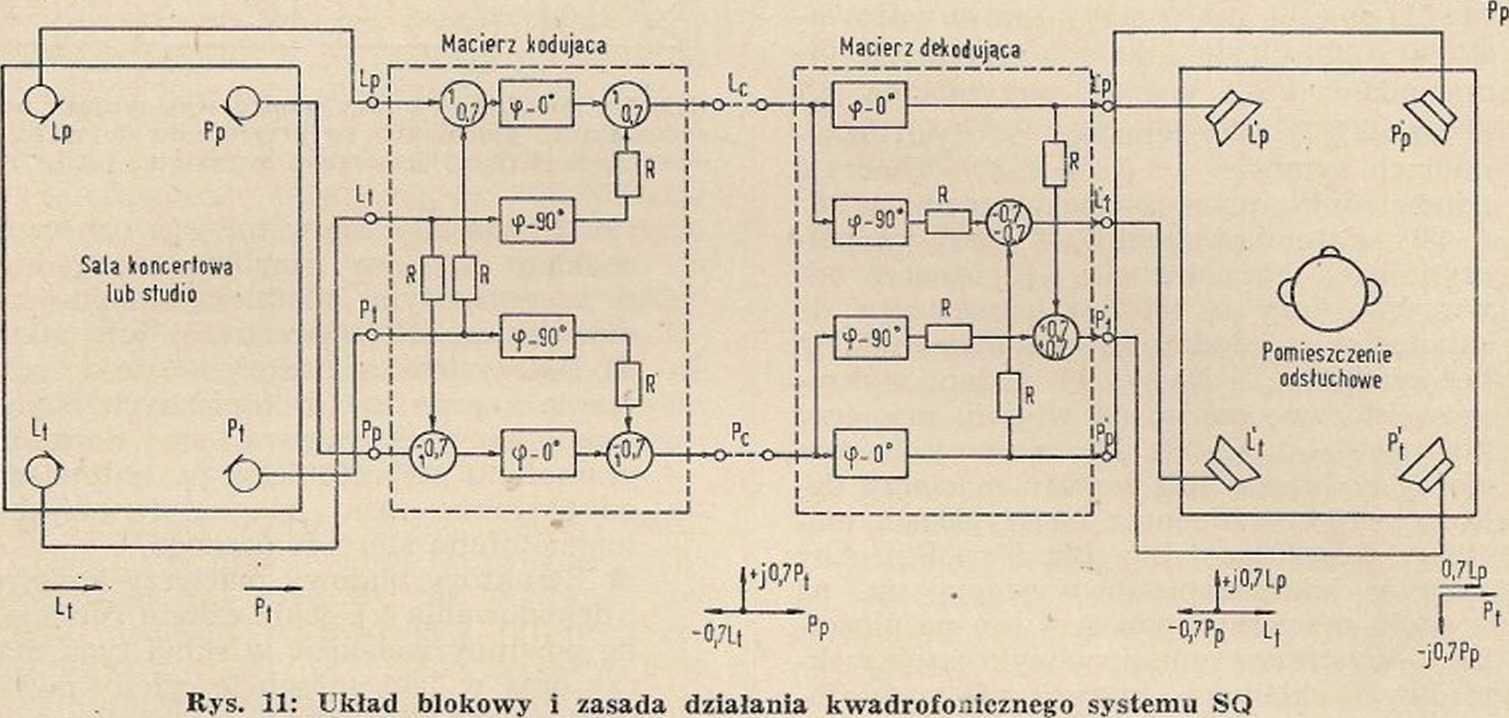
2. Układ blokowy systemu SQ
Podstawowy układ blokowy systemu SQ jest przedstawiony na rys. 11. Użyte na tym rysunku symbole mają następujące znaczenie:
Lp — sygnał z mikrofonu 1 e\j?\Jg'AJrz/ed-i niego;
Lt — sygnał z mikrofonu lewego-tylnego; Pt sygnał z mikrofonu prawego-tylne-
go;
Pp — sygnał z mikrofonu prawego-przed-
niego;
Lc — lewy całkowity sygnał zakodowany na wyjściu macierzy kodującej;
Pc — prawy całkowity sygnał zakodowany na wyjściu macierzy kodującej; L’p — lewy-przedni sygnał wyjściowy macierzy dekodującej;
L’t— lewy-tylny sygnał wyjściowy macierzy dekodującej;
P’t— prawy-tylny sygnał wyjściowy macierzy dekodującej;
P’p— prawy-przedni sygnał wyjściowy macierzy dekodującej;
Sygnały L’p, L’t, P’t, P’p po wzmocnieniu przykłada się odpowiednio do głośników lewego-przedniego, lewego-tylnego, prawego-tylnego i prawego-przedniego u-stawionych w pomieszczeniu odsłuchowym.
3. Równania kodowania i dekodowania
3.1. Równania kodowania macierzy kodującej systemu SQ mają następującą postać: Lc=Lp+0,7Pt -0,7j Lt (1)
Pc=Pp -0,7 Lt+0,7j Pt (2)
Z równań tych można określić jaka jest postać sygnału Lc i Pc dla różnych przypadków t.j., gdy do wejścia macierzy kodującej przyłoży się różne kombinacje sygnałów wejściowych. Np. gdy do wejścia JJ1J ^rzpl^u^^zyłozy się tylko Lp
Lc=Lp zaś Pc=0
Ogólnie można powiedzieć, że w skład sygnału Lc i Pc wchodzą odpowiednio te składowe, które w danej chwili zostały przyłożone do wejść macierzy kodującej. Amplitudy i fazy sygnałów Lc i Pc są o-kreślone przez współczynniki równań kodowania.
3.2. Równania dekodowania macierzy dekodującej systemu SQ mają następującą postać:
Jeżeli do powyższych równań dekodowania (3), (4), (5), (6) zamiast Lc i Pc wstawić odpowiednio prawe strony równań kodowania (1) i (2) to da się wyrazić sygnały wyjściowe macierzy dekodującej przez sygnały wejściowe przyłożone do wejścia macierzy kodującej. Tak przekształcone równania dekodowania mają następującą postać:
Wyszukiwarka
Podobne podstrony:
a006 — 6 — mUIMITRRDIORA ZASADA DZIAŁANIA KWADROFONICZNEGO SYSTEMU SQ T»06,ł08 H10 TCOl.603,605,
Systemy diagnostyki pokładowej pojazdów 2.2. Zasada działania Diagnostyczny system kontroli emisji
2. (02) Zasada działania hiperbolicznych systemów nawigacyjnych. Dwuwymiarowa hiperbola to krzywa bę
img140 MO 12.4*3* Terwogatry blmetallczoe Zasada działanie teraocetrów bloetalicuznycb oparta Jeat n
Zasada działania suwmiarki z podziałką kołową polega na współpracy kółka zębatego 2 z zębatką
Czujnik indukcyjny Zasada działania czujników indukcyjnych opiera się na zmianie indukcyjności wskut
IMG 74 OCENA DOSTAWCO To operacyjne działania prowadzone systematycznie, które mają na celu ocenę&n
PROCES OCZYSZCZANIA POWIETRZA W FILTRACH TKANINOWYCH Zasada działania odpylaczy filtracyjnych jest o
104 Paweł Boguszewicz, Sabina Sala Zasada działania typowego stanowiska (Rys. 3) polega na kontrolow
Image164 (3) KUjąi sprav rad Rys. 1 Zasada działania opisywanego wykrywacza metali polega na wpływie
więcej podobnych podstron